
The other day, my quad dropped from about 50 feet because I accidentally disarmed my quadcopter mid air and crashed. Sascha (aka Arakon) was kind enough to shared with me how he setup his switches and modes to avoid this from happening.


This way of setting up cleanflight can help prevent disarming your flight controller mid-flight by accident. In fact this technique can also help avoid the bouncing when touching the ground (at landing) associated with Airmode.
In Cleanflight Configurator GUI, “Configuration” tab, uncheck “Disarm motors regardless of throttle value“.
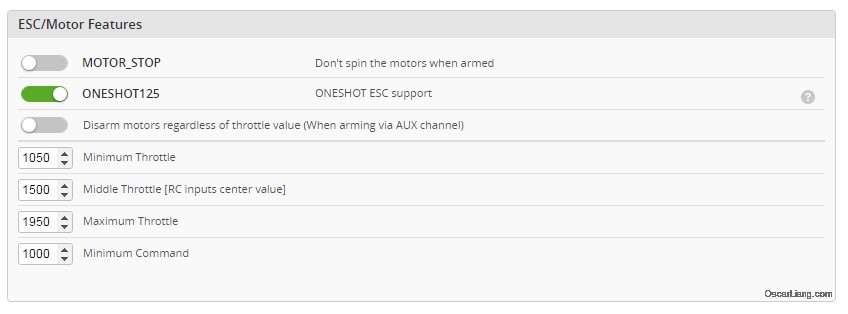
This means that the flight controller will not disarm unless the throttle is all the way down to zero. Even if you accidentally flip the arm switch, you can quickly and easily flip it back, without the copter falling out of the sky.
Next, in the “Modes” tab, assign “Arm” and “Airmode” on the same switch on your transmitter, and use the same range (in my case, this is AUX3).
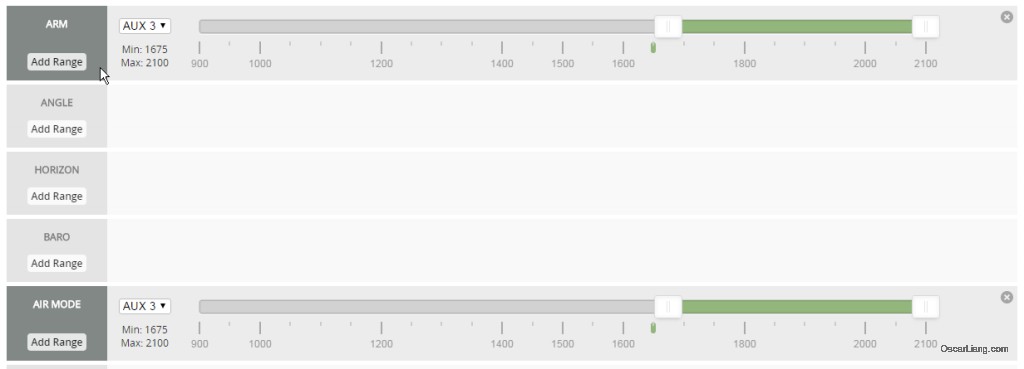
This way, Airmode becomes active as soon as you arm. And it’s turned off when you disarm.
Now when you are ready to land, first flip the Arm switch to disarm the copter.
Notice that the copter will remain armed and still flying because throttle is NOT at zero yet, but Airmode gets turned off because it’s assigned to the arm swtich.
Slowly lower your copter down on the ground, and move the throttle stick all the way down. The copter is now successfully and safely disarmed, motors are turned off without any bouncing off the ground.
Here is a demo video:
https://www.youtube.com/watch?v=r6goU5b8m2c
Warning – Side Effect
There is some potential problemt to this technique though. Your motors wouldn’t stop spinning when you flip the arm switch, until your throttle is completely zero. If there is some problem happen to your throttle channel, or the stick physically, you might get into trouble of disarming your quad. That’s something you need to consider before using this method, so do this at your own risk.
10 comments
With betaflight 3.3 release, disarm_kill_switch is gone. I really liked this feature. I wonder if there is a way to program my taranis to do the same thing? I think a logical switch may be possible.
How can i do this in cc3d/librepilot?
Hello Oscar,
How about failsafe stage 2 landing – will this also disable motor stop on stage 2 landing? On FS-I6X i have set failsafe to keep throttle lower, but not entirely off on stage 1
Stage 2 is only triggered when you unplug RX from FC. When failsafe happens in RX (stage 1), Stage 2 is not triggered as RX is still sending valid signal to FC.
Hi,
put another switch on throttle cut.
so when like the 2 bottom switches of dx6, kill both. throttle cut on remote additional is good for safety
Is there some way of programming this in OpenTX?
i am sure you can play around with the “logic” page in the TX :)
Hi David,
I do this in the Taranis using logical switches. Here’s a screenshot: http://imgur.com/gz3BqHT. L4 is the arming signal and L1 is unrelated (its a voltage alarm).
Basically, arming/disarming can only occur at minimum throttle and detection of a positive (for arming), or negative (for disarming), transition of the arming switch (mine is SF).
Hi oscar ,
I can tell you that I did the same but with 3 position switch.
Disarm, arm+airmode,Disarm because I think that in case of a problem that you need a fast Disarm it’s faster and friendlier to move the switch down instead of up :)
that’s a good idea too :) thanks for sharing!