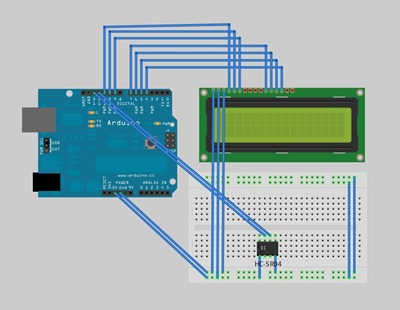
Arduino HC-SR04
The Arduino HC-SR04 is different from most of those commonly seen on the market, which have 4 pins compared to 3 pins. But the operation principle is the same, transmit signal, and depends on when the signal is received to estimate the distance.

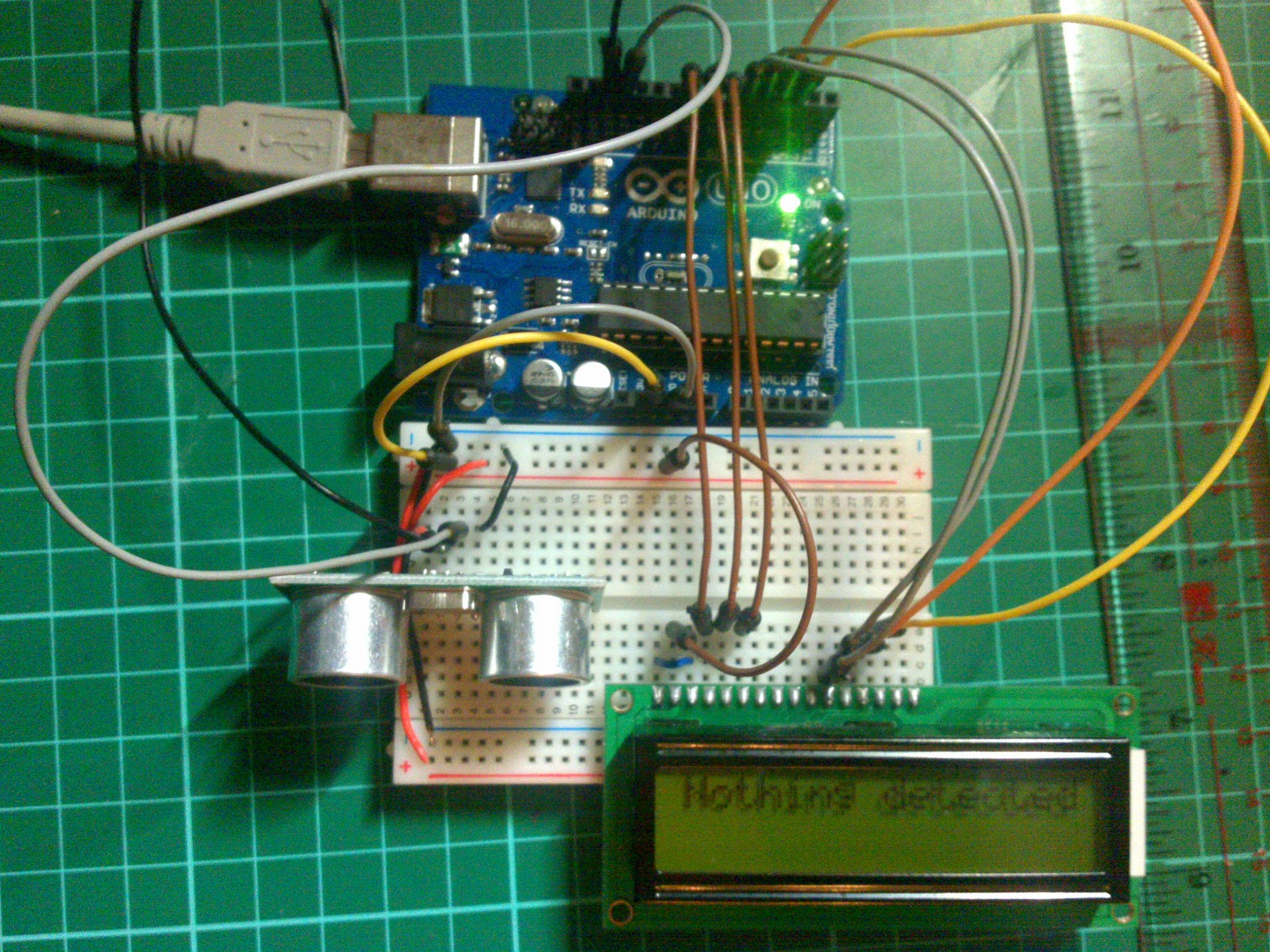
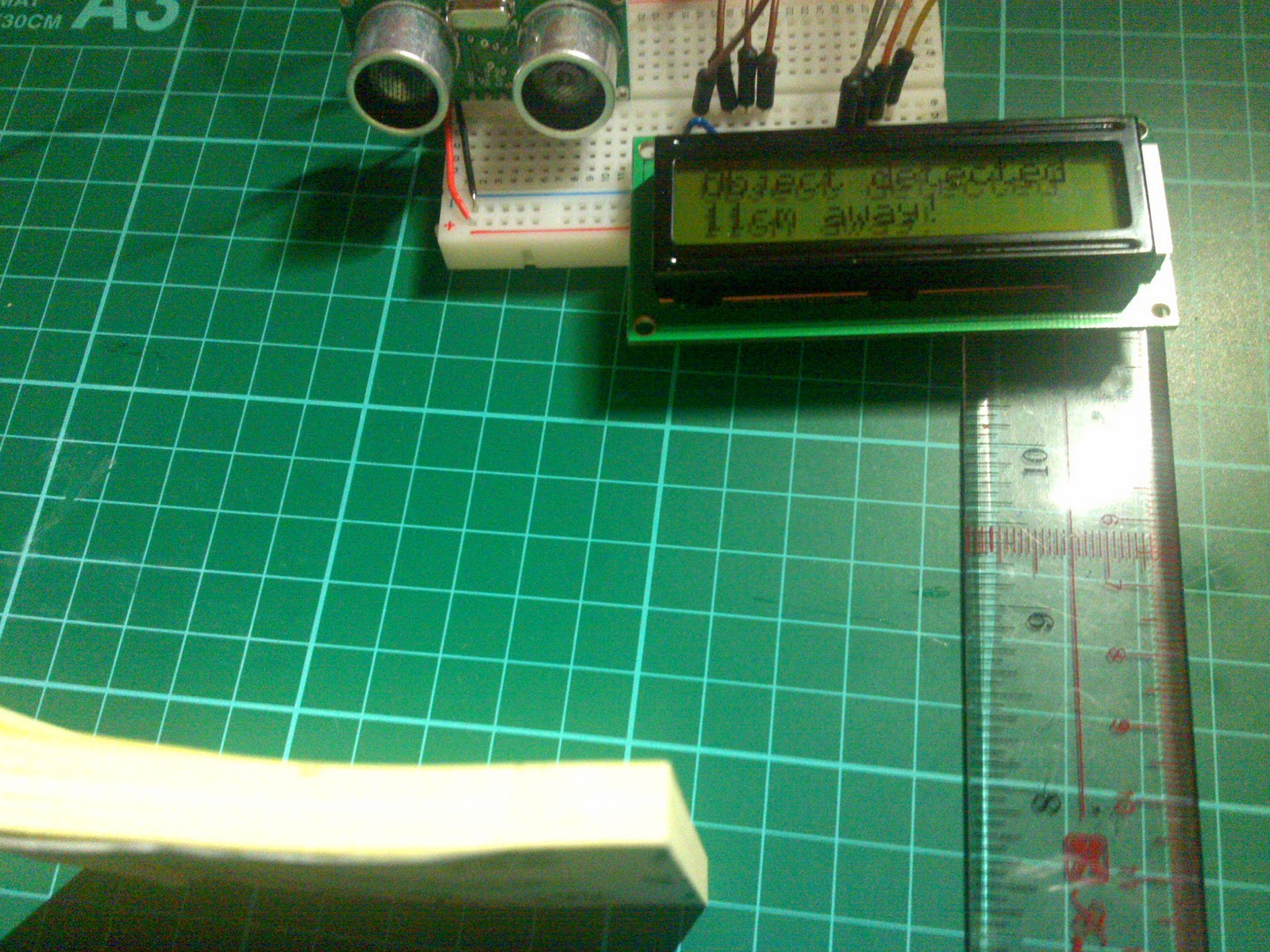
Result:

Arduino HC-SR04 not only inexpensive but also practical, use a sample AVR development boar –Arduino , with a LCD screen , you can make a easy rangefinder device , which can ranging 2cm to 400cm . (although i couldn’t get it work more than 2 meters :-(

[sourcecode language=”cpp”]
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 7, 6, 5, 4, 3, 2);
int pingPin = 13;
int inPin = 12;
void setup() {
// set up the LCD’s number of columns and rows:
lcd.begin(16, 2);
}
void loop(){
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(10);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(inPin, INPUT);
duration = pulseIn(inPin, HIGH);
// convert the time into a human readable distance
cm = microsecondsToCentimeters(duration);
// if distance is too large (probably not being measured properly)
// will discard the result.
if (cm > 400){
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Nothing detected");
}
else {
// clear lcd content
lcd.clear();
// set the cursor to column 0, line 0
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(0, 0);
lcd.print("Object detected ");
lcd.setCursor(0, 1);
lcd.print(cm);
lcd.print("cm away!");
}
delay(500);
}
long microsecondsToInches(long microseconds){
// According to Parallax’s datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
return microseconds / 74 / 2;}
long microsecondsToCentimeters(long microseconds){
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;}
[/sourcecode]
2 comments
yes
Hi, I do think this is a great website. I stumbledupon it ;) I’m going to return once again since
I saved as a favorite it. Money and freedom is the
greatest way to change, may you be rich and continue to help other
people.