
One of the most important settings in FPV drone tuning is rates—they determine how your drone responds to stick inputs. If your rates are too high, your quad will feel twitchy and hard to control. If they’re too low, it may feel sluggish and unresponsive. In this tutorial, I’ll break down what Betaflight rates are, how they work, why Actual Rates are the best option, and how to pick the perfect rates for your flying style.


Table of Contents
Rates Need Tuning
Just like PID and filters, rates should be fine-tuned for your specific flying style. It is like wearing the wrong shoes for the wrong sport — not only will you perform worse, but it can also hinder your growth progress.
If you are relatively new to FPV and have never tried different rates, you might be surprised by how much better your flying can become. Often, your skills improve rapidly as soon as you change your rates, because the quad becomes easier and more precise to control. It is also simply more fun to fly, which means you practice more. The same goes for the default rates in Betaflight. While they are fairly tame and beginner-friendly, they can still limit your progress without you realizing it.
Now, you might be wondering: what rates should I use? Just tell me!
I wish there were some magical “best rates for everyone”, but that simply does not exist. Depending on your flying style and your drone, you may need very different rates.
That is why it is important to understand how rates work and tune them to your own preference. You can also copy the settings used by your favorite pilots and use those as a starting point, then fine-tune them until they feel right for you.
With that said, if you have only just started out, do not rush into changing your rates. Focus on mastering the basic controls first. If you are still in your first few hours of simulator practice and crashing every 30 seconds, it is probably too early to start messing with rates, because you likely do not yet know what you are looking for. Start experimenting with rates once you are more confident with your flying.
Different Rate Systems
Betaflight offers several different rate systems, which can be confusing for beginners. Do not worry — you only really need to know one of them.
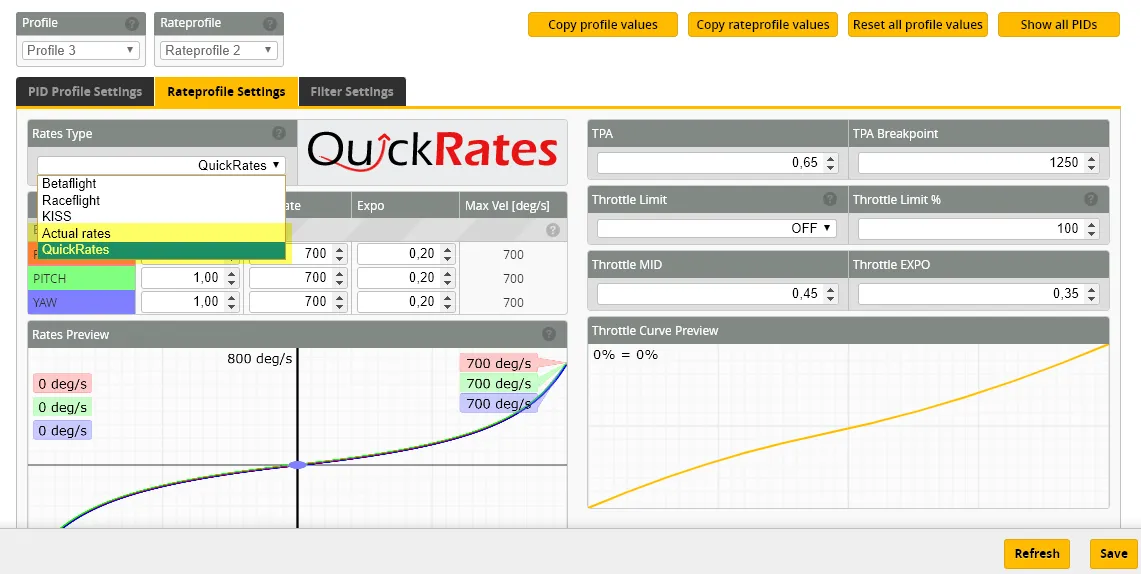
There are a total of five rate systems in Betaflight:
- Actual Rates
- Betaflight Rates
- Raceflight Rates
- KISS Rates
- Quick Rates
However, the most widely used system today is Actual Rates, and that is the only one you really need to learn.
In this tutorial, we will look at Actual Rates, how they work, and how to tune them to suit your flying style. I will also share my personal rates for different types of aircraft if you are interested and want to try them out.
Understanding Actual Rates
“Actual Rates” are the default rates in Betaflight, providing a straightforward approach to setting maximum rotational velocity (e.g., entering 1000 corresponds to 1000deg/sec) and center sensitivity values. No more guessing, as this system is far more intuitive and less confusing for pilots compared to the older Betaflight rates.
If you are new to the hobby, I’d recommend using Actual rates. If you come from another type of rates, there are many online tool that help you convert rate values between these different systems.
There are 3 values in Actual Rates: Center Sensitivity, Max Rate, Expo.
Center Sensitivity

Center Sensitivity relates to the responsiveness around the center stick position. A lower value offers finer, smoother control, while a higher value results in a more reactive drone to stick movement.
Max Rate
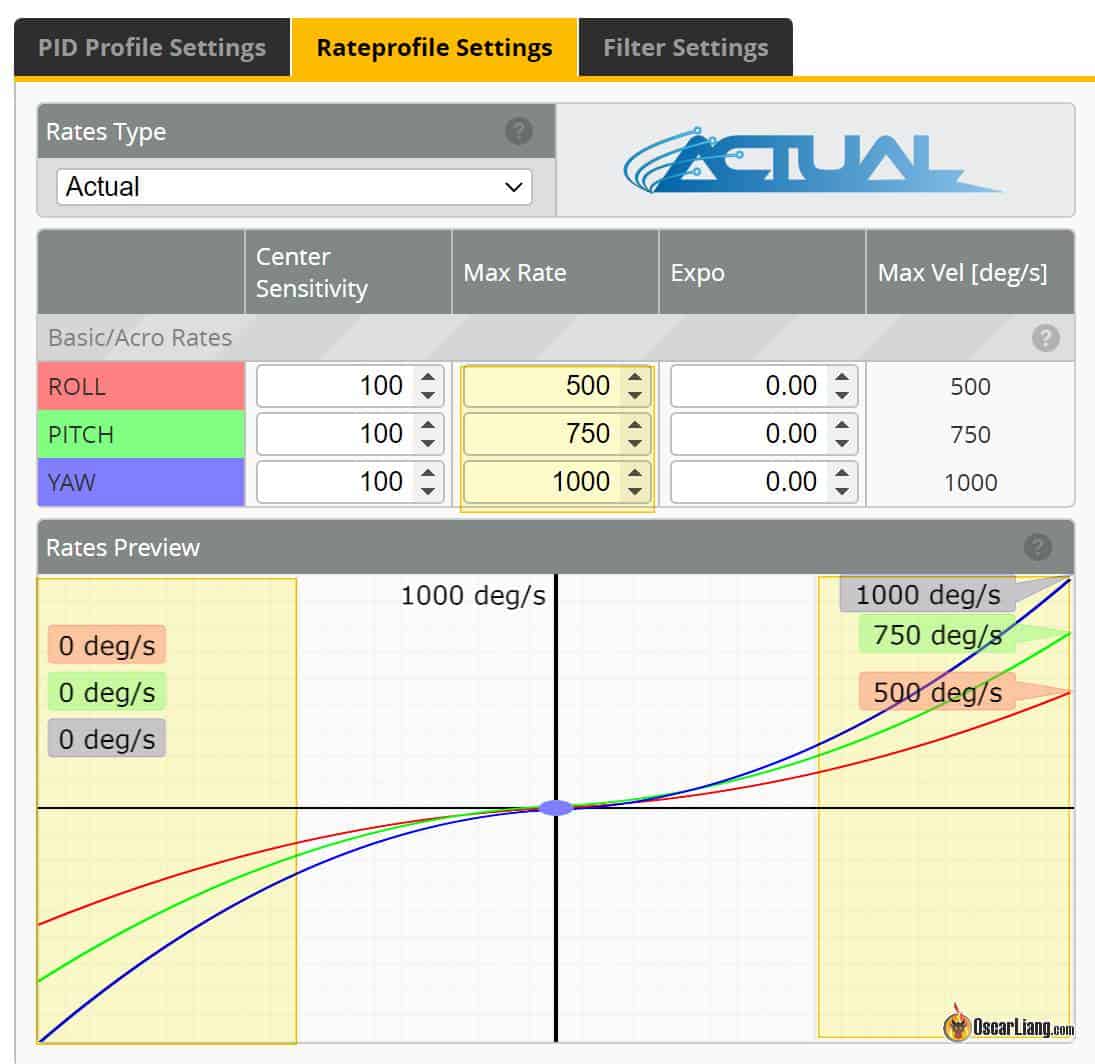
Max Rate defines the drone’s rotational speed at full stick deflection. The value you enter represents the exact maximum angular velocity. For example, entering 700 means your drone will attempt to rotate at 700 degrees per second at full stick.
Beginners often set Max Rate too low, thinking it will make learning flips and rolls easier. Personally, I find the opposite to be true. If the rate is too low, the quad takes too long to complete a flip, loses too much altitude, and becomes harder to recover.
The highest Max Rate allowed is 2000, but setting it that high is not recommended, as it becomes extremely unpredictable and difficult to control for the average pilot. Not to mention, the maximum angular velocity can also be limited by the power of your motors. When the motors reach their physical limit and cannot spin any faster, the actual maximum angular velocity may be capped, regardless of the higher value set in Betaflight. You can verify this in a Blackbox log.
For most pilots, a Max Rate between 600 and 1000 is a good range.
Expo

Expo flattens the curve between center stick and full stick. To achieve a more linear feel, keep Expo low. To make the center stick region broader for finer control, increase Expo. Keep in mind that increasing Expo also reduces center sensitivity.
While Expo can go as high as 1.0, using too much can reduce center stick sensitivity too much and make the quad’s response near full stick feel less predictable and more jumpy.
Now, while the default Expo is set to zero, which makes the rate more linear, I personally think it is bad, and should be increased.
Some people might wonder: why use Expo at all? Isn’t a linear rate better because it is more predictable?
There is some logic to that, but in reality, without Expo there is just not enough usable stick travel around center for precise control. The quad tends to feel too twitchy.
Personally, I find 0 Expo and a highly linear rate almost unflyable. You need to flatten the curve somewhat to get a wider region for fine control around center stick, so some amount of Expo is almost inevitable.
That said, too much Expo can make the quad feel lazy – less responsive and less lively, so there is a balance to strike depending on your flying style. For racing and freestyle, I generally use less Expo. On cinematic rigs, I usually use more.
Tuning Actual Rates
Steps
Here’s how I personally find the best rates.
Start by setting the Center Sensitivity. Cruise around and navigate through tight gaps to find the desired control precision around the center stick:
- If you feel like you have to move the stick a lot to get the drone to move in the way you want, Center Sensitivity is too low.
- If the drone overreacts and feels jittery (e.g. it rocks left and right because overshoots), Center Sensitivity is too high.
Review your flight footage will help you judge more objectively – with the right center sensitivity flying through tight gaps, the flight should look pretty smooth.
Next, establish your Max Rate by performing flips and rolls – make sure you are happy with how snappy your drone is. This step should be relatively straightforward,.
Lastly, practice freestyle moves involving various stick positions between center and full stick. To flatten the rate curve, add some Expo, but be aware that this can reduce predictability towards full stick. If you increase Expo too much, you may need to slightly raise Center Sensitivity to compensate. Expo is primarily a matter of personal preference.
Repeat this process for roll, pitch and yaw, or you may simply copy the same values for all 3 axes.
Guideline
Here’s a general guideline for different flying styles and applications based on my personal experience:
First set your max rates based on how snappy your want your flips and rolls to be:
- Cinematic / Racing: 600-800 Max Rate
- Freestyle: 800-1000 Max Rate
- Line of Sight: 1000+ Max Rate
Then set center sensitivity. Lowering center sensitivity improves precision, allows you to make tiny corrections without jerky movement—this is especially useful for cinematic flying and smooth freestyle lines.
- Cinematic: 50-150 Center Sensitivity
- Freestyle: 100-200 Center Sensitivity
- Racing / Line of Sight: 150-250 Center Sensitivity
Expo controls how smooth or aggressive your stick response is in the middle of stick travel. If your quad feels too jumpy and robotic, adding a bit of expo can make movements feel more natural. If you fly freestyle, a small expo curve makes tricks like juicy flicks and snap rolls feel smoother. But too much expo can make bigger movements less predictable.
- Cinematic: High expo (0.6 – 0.8) for ultra-smooth shots.
- Freestyle: Medium expo (0.5 – 0.7) for balance between smoothness and snap.
- Racing: Low expo (0.4 – 0.6) for quick, linear and predictable response.
My Rates
My Freestyle Rates
Pitch/Roll
- Center Sensitivity: 180
- Max Rate: 950
- Expo: 0.70
Yaw
- Center Sensitivity: 200
- Max Rate: 650
- Expo: 0.55
Note that my rates differ depending on how I hold the sticks too. When “pinching”, my max rates are similar, but center sensitivity tends to be higher because I can move the sticks slower and more accurately when I am pinching compared to thumbing, so I need slightly higher sensitivity to compensate.
Here are my thumbing rates for comparison:
Pitch/Roll (Thumbing)
- Center Sensitivity: 140
- Max Rate: 950
- Expo: 0.50
Yaw (Thumbing)
- Center Sensitivity: 180
- Max Rate: 650
- Expo: 0.40
My Tiny Whoop Rates
Pitch/Roll
- Center Sensitivity: 250
- Max Rate: 1100
- Expo: 0.55
Yaw
- Center Sensitivity: 300
- Max Rate: 900
- Expo: 0.55
Delving into Betaflight Rates
Betaflight Rates is a legacy system, and while I don’t recommend it I thought it would be nice to have a little introduction for newcomers. Why I don’t recommend it? Well, it’s harder to use than Actual Rates because the 3 terms are interdependent, making it less intuitive to use.
RC Rate
RC Rate affects the rate curve’s slope linearly throughout the entire stick range and determines how quickly the quadcopter rotates at full deflection. If you’re familiar with computers, you can think of it as mouse sensitivity.
A higher rate results in a more responsive but twitchier quad. Small stick movements will produce significant quad movements. Increasing the RC Rate also boosts the quad’s spin speed, enabling faster flips and rolls.

However, keep in mind that the maximum angular velocity can be limited by your motors. When motors reach their physical limitations and cannot spin any faster, the maximum angular velocity is capped, regardless of the higher value set in Betaflight.
RC Expo
RC Expo, also known as Exponential or simply Expo, reduces sensitivity near the stick’s center where fine controls are needed (for Roll, Pitch, and Yaw) but does not change the maximum angular velocity at full stick.
Expo is a percentage value, ranging from 0% (0) to 100% (1). At 0%, the increase in rotational speed between minimum and maximum stick input is linear, forming a “V” shape with no stick input in the center. At 50% stick input, your quad will rotate around the given axis at exactly half the maximum rotational velocity.

Increasing Expo reduces sensitivity around mid-stick, requiring further stick movement to achieve the same rotational velocity. Visualize Expo as transforming the “V” shape into a “U”, with a higher expo percentage flattening the “U” around the middle.
Super Rate
Super Rate (or simply Rate) increases both max angular velocity and sensitivity around the center stick.

By raising the Super Rate, you can maintain moderate stick sensitivity around mid-stick for standard flying maneuvers while still achieving snappy rolls and flips at the stick endpoints.
Super Rate essentially combines the effects of RC Rate and Expo, allowing for more flexibility in achieving the desired stick feel.

So why use Super Rate? We can just use RC Rate and Expo right? Yes, sort of, but having Super Rate gives us more flexibility in achieving the stick feel we want.
Tuning Betaflight Rates
Tuning rates ultimately depends on personal preference and “feel.”
Begin with the default Betaflight values: RC Rate 1.0, Super Rate 0.7, Expo 0 for all three axes.
When tuning my rates, I always adjust RC Rate first. Perform flips and rolls, and if the quadcopter spins too slowly, increase RC Rate until satisfied. Note down the max angular velocity (deg/sec) in the Betaflight Configurator. For my freestyle rig, I usually aim for around 700-800 degrees per second.
Next, simply cruise around (without flips or rolls) and ensure the quadcopter responds swiftly and predictably to your stick inputs during turns. If it’s too sensitive for precise movement, increase Expo. If it’s too slow to react (not sensitive enough), decrease Super Rate while increasing RC Rate to compensate and raise the max angular speed.
Expo isn’t always necessary since Super Rate can provide the same effect. However, if you still find small movements around mid-stick too sensitive, increase Expo until you strike the right balance between precision and responsiveness.
Pro Tip: Applying Expo on the radio (TX) reduces your stick resolution, so always set Expo in the flight controller software whenever possible!
You may need to iterate through the process several times until the rates feel perfect. Remember that pitch, roll, and yaw rates don’t need to be identical—freestyle pilots often prefer higher roll and yaw rates but lower pitch rate, it’s all personal preference.
Different flight controller software has different ranges and scaling in PID, rates and expo, so the same numbers don’t necessarily give the same results in a different firmware. You should be able to find online converters if you want to migrate to a different FC firmware.
To give you some examples, here are the Rates and Expos I used in the past:
Freestyle
- RC Rate – 1.2
- Super Rate – 0.77
- RC Expo – 0.20
Smooth Cruiser:
- RC Rate = 0.80
- RC Expo = 0.00
- Super Rate = 0.65
Expo is set to zero here on purpose, this is to avoid overreacting in close situations and actually gives you overall smoother result.
Aggressive Acro Quad:
- RC Rate, Pitch/Roll = 1.80, Yaw = 2.00
- Super Rate, All = 0.64
- RC Expo, Pitch/Roll = 0.20, Yaw = 0.15
Tiny Whoop Rates
- Roll+Pitch: RC Rate 1.2, Super Rate 0.75, Expo 0
- YAW: RC Rate 1.3, Super Rate 0.80 Expo 0
- If using acro mode, enable crash_recovery, there are some settings (get crash_ in CLI) you might want to tune first to avoid false self-centering.
As your flying skill improves, and you become more comfortable performing aggressive manoeuvres, you could try to crank up your rates. And you will also probably want to use a bit more expo to maintain accurate fine control.
There is no right or wrong Expo and Rate values, as long as it suits you. For example, I have shaky fingers, so my expo might be a bit higher than others. :p
Don’t Change Your Rates!
Some pilots adjust their rates for different drones, or change their rates frequently, but this can be counterproductive to your development as a pilot.
Having consistent rates across all your quads is crucial for developing muscle memory. If you’re constantly tweaking your rates, your instincts will never fully develop. Instead, pick one set of rates and stick with them—this will help you build consistent, instinctive stick control, no matter what you’re flying.
That said, this rule primarily applies to quads of similar size and power. If you’re flying drastically different aircraft—such as a 5″ freestyle quad and a tiny whoop—it makes sense to adjust rates accordingly. These drones have very different flight characteristics and are flown in entirely different environments, so using different rates for each is both practical and necessary.
Throttle Mid and Throttle Expo
Throttle Expo modifies the shape of the throttle curve, flattening it around the “Throttle Mid” point. This allows for easier throttle management and maximum stick resolution around the desired throttle level. If you find yourself having trouble to keep the drone hover in place without going up and down, you can try using Throttle Mid and Expo.
Throttle Mid adjusts the position in the throttle curve where Throttle Expo is applied.
I usually set Throttle Mid to the throttle of cruising speed (not hover throttle). For instance with my tiny whoop, I normally cruise around 28% throttle (although the hover throttle is around 20%), so I set Throttle Mid to 0.28. Then set Expo to flatten the curve, the closer to 1, the flatter is it around Throttle Mid, but you also lose throttle sensitivity. Generally I find 0.6 or 0.65 a good value for whoops, and for beginners, you can even go up to 0.8 for gentler altitude control.
By setting Throttle Expo to 0, effectively turns this feature off, and your throttle curve will be linear regardless of the Throttle Mid value.
Alternatively, you can set up a throttle curve in your transmitter for even more complex throttle control.
Final Thoughts: The Magic of Actual Rates
Switching to Actual Rates in Betaflight was a game-changer for me. It gave me full control over how my quad responds without annoying side effects from outdated rate systems. If you’re still on old Betaflight rates, do yourself a favor—switch to Actual Rates and never look back. You’ll get smoother, more predictable, and easier-to-tune control.
Edit History
- 2015 – Article created
- 2018 – Article updated
- 2021 – Added info about new feature in Betaflight: Actual Rate
- 2022 – Using Actual Rate as the standard, updated screenshots, updated Rate Tuning instructions,
- 2023 – Simplified URL, optimized title
- Feb 2025 – Updated tutorial
- July 2026 – Updated tutorial
65 comments
I think you got it the wrong way around. You actually get a more linear feel with higher expo. Because the curve is no longer a continuous curve but rather a more straight line before it goes up quickly. And what you “feel” is in the lower half mostly.
If you start with a straight line, and only apply Expo, you will find that that straight line is shaped into a S shape – Expo will inherently reduce linearality of the rate curve, it’s by design.
What happens here is it flattens the centre part of the curve, so you have less sensitivity, and more resolution / precision in that region. In the process, the bent down rate curve becomes less linear (you will see that if you zoom in enough).
Hello Oscar
Thank you so much for all these informations.
I’m just getting started in the world of drones using simulators like Liftoff and Uncrashed.
Is it a good idea to apply your advice on control inputs to these simulators?
Yes, most popular FPV simulators use the same “Actual rate” system just like Betaflight, you can use the same rates in these sims and quads in real world.
Very helpfull info for me as i’m a total newbee. Thanks!
I HATE IT!! Your rates are SUPERB! thanks boss
Thank you so much for sharing. I have been reading many YT intros and yours is the BEST. Look forward to seeing other interesting articles from you.
“Center Sensitivity relates to the responsiveness around the center stick position. A lower value offers finer, smoother control, while a higher value results in a more reactive drone to stick movement.”
This is still vague in understanding. Is “Center Sensitivity” defined by a different unit from “Max” rate?
If one has 1000 (unit) as “Max rate”, that means “full rotation around itself” per second of an object? Established? Of course we are speaking of “Actual” rates system.
“Center sensitivity” at 500 is of the same unit of “Max rate”? Like saying 500 rotations per second around itself?
And the center point of the RC- stick, is represented at the center of the Y and X axis on the graph which begins at 0 zero ration per second?
So, “Center Sensitivity” should not also be 0 degrees?
Or the the 500 rotations per second (assumed unit) “Center Sensitivity”, is located at quarter distance of the total deflection of the stick north to south points, and separately, west to east points, while ‘stick at the middle and centered’ is the 0 rotations per second?
And what does the center point represent in the realm of RC stick if “Center Sensitivity” is not at the quarter-distance?
Then… I will have to think about “Expo” value, what ever unit is such.
Dyslexia never makes it easier.
You must have read my mind ;) Thank You for this timely post. Just last week I decided to go through my collection of freestyle quads and make the rates the same, to make them all more like my favorite quad, but within minutes I was very confused. Now I know to go back and set them all to “Actual Rates” to establish that common baseline, and go from there.
The explanation is clear and provides the best clarification. It was very helpful. Thank you.
Thank you. Much better explanation than Bardwell and Rosser. They assume you are at the same level as they are.
That’s the difference between someone with knowledge and someone with knowledge that knows how to explain it at different levels ( good instructor).
Thank you!
Merci Oscar, so well explained , thank you so much !!!
Hello.. I calbrated my radio but when i go to sensitivity page, im only getting .80% of throttle.I tried a different radio but the same result. Can you help me get full 100%…My friends are using the same drones and setting but there drones are a lot faster..please help.
First of all, what do you mean by sensitivity page? where do you find it?
And where do you see 80% throttle?
Hi Oscar, when setting the Throttle Mid point, you say to set it to the throttle of cruising speed. Is there a way to determine accurately what position that is, or mostly just a guess?
If you are trying to get your cinewhoop to fly with low rates but still be able to do flips and rolls, this is the article you need to read. Awesome. Thank you.
Hey Oscar, my name is Eric. I would really like to speak with you about a project my partner and I have been working on for over a year now and I think it’s finally there. It’s a lot to go over in text. I’d appreciate it if you could give me a few minutes to explain what it is we’ve got. It’s a new kind of drone. It looks like a cinewhoop but flies like a 5 in. We’ve been granted 2 provisional patents for a couple of things on the drone that make it what it is and how it flies. I’m thinking any improvement from his point can be achieved through beta flight tuning. I will tell you everything when we talk. We can exchange info through email if you like. LMK. Looking forward to hearing back from you. Thanks
Is DJI controller fully compatible?
I have a problem for whenever doing maximum pitch forward.
If I go max pitch then it doesn’t stay forward and it changes to backard pitch.
Thanks man, really helpful text!
Hi Oscar, the version of BetaFlight I’m on doesn’t seem to have a “SUPER RATE” adjustment column, am on an older version possibly? Thanks.
Hey Oscar; first of all – thank you so much for the effort you put in this site. It has helped me tremendously!! I have one question regarding the rates. I put my rates in Betaflight 4.2 and no problem with this but then i go flying and when i look into the rate options in the dji goggles and there are different rates then i set in BF4.2. It seems it makes no difference what i do in BF, the dji goggles always show the same standart rate … any idea? Thank you so much!
Make sure you’ve chosen the correct Rate profile in Betaflight? There are 3 profiles.
Thank you Oscar
This has help me alot with the DCL game.
I have just belatedly found this useful post after trying to work out what the configurator settings mean.
However I cannot quite see the point of having three settings – rate, super rate and expo? It seems to me that everything necessary could be achieved by two – rate and expo? The rate being rotational deg/sec at full stick movement (linear), and expo ratio of centre stick position slope to max stick position slope (or vice versa)? In the end it is just one transfer function, so cannot see why it takes three settings to achieve that?
Also, I think it might be more accurate to say that applying expo in the FC rather than Tx increases stick resolution at the centre (at the expense of max deflection resolution) rather than doing it in the Tx reducing it. Doing it in the Tx just doesn’t increase it, but it doesn’t reduce it either.
Hi Oscar
Thanks for your valuable blogs.
I’ve been coming back to this article quite a few times over time. Nice reference to have.
Just one thing. Is there a typo in your Smooth cruiser settings?
You have RC Expo, All = 0.03
Shouldn’t that be 0.3? Can’t see how such a low expo will give you smooth cruising?
For me, expo is to accommodate rate, if rate is low you don’t need much expo otherwise it will make your centre stick way too insensitive. Also Super rate also acts as expo, setting it higher gives you some expo effect.
Hi to get a 700Deg which combination RC and Super rates should be given for freestyle flying? And do do smooth flips and rolls. Iam flying 2in micros.
There are endless combination… but This is what I’d use, RC Rate 1.3 with Super Rate 0.65-0.67?
Oscar, is there any excel file that generates the Rate chart as in BF based on inpunt Parameters: Rate, SuperRate, RCExpo? I’d like to create one but it is difficult to find the correct formulas
Best to adjust this on the actual quad, sometimes the actual response from the quad is slightly different that the numbers suggest in the GUI, because it’s largely dictated by the performance of motors, props, ESC and battery
Thank yoi. Why in some quad, the Max Vel Deg/s of yaw is smaller or bigger, despite the rates of pitch, roll and yaw are equal? Thanks
It’s just an estimation, the actual rates of rotation depends on your props and motor, and how good the battery is providing the power.
Hello.
I’m new to this hobby, and i’ve just bought a Taranis qx7, but the throttle stick doesn’t give throttle before its in 50% travel (in the middle).. Do you know how to change that?
Best regards Martin.
Doesn’t sound like a straight forward question, please join our forum for further troubleshooting. (http://intoFPV.com)
Hello…I would like to know if transmitter DUEL RATE is the same thing as FC RC RATE? Should I have both my DUEL RATE in my transmitter and RC RATE in my betaflight set at 100? Thanks. Jim
@James Wallo
As he stated in the article, you should NOT use any rates or expo settings on your TX, let the flight controller read your actual stick inputs and set all expo/rates using the configurator. TX expo settings were necessary when using servos and control surfaces as with a fixed wing or heli – but are not needed with the use of a FC that allows you to program them internally. The FC’s gyros are able to detect the rate at which the model is rolling or flipping in degrees per second and uses the rate/expo settings to provide a consistent roll rate.
Besides, it would be difficult to set a desired rate if both the FC and TX were performing expo calculations. Ideally you would have rate/expo numbers that you are comfortable with and you’d be able to punch in those numbers on any new build as a starting point. That way, you would have a set rotational rate and you would be used to flipping 360 degrees in x time, allowing you to “feel” when a roll or flip is complete and not have to use visual confirmation.
But why not free up that memory from the FC if the TX can handle it instead?
Then you can also adjust graphs on the fly.
Now it’s march of 2017 and some things seem to be different. Like when you write “I personally use no expo or just a little expo (<10)", the throttle expo now goes from 0 to 1, so <10 would be <0.1 today, right? Also when you write about throttle mid, "You need to use this with some throttle expo, otherwise it won’t do anything." is this statement still true today? So if I want to make use of throttle mid, I have to set expo to something like 0.05? Thanks!
Yes you are right, these firmware keep changing stuff it’s impossible to keep track of and update all the articles :D
But I will try when I have time! thank you for the comment!
You cover the broad strokes which is the important part. People can get educated on the specifics with tutorials.
Your site is my favourite for technical FPV knowledge. Particularly your articles on noise filtering.
Hey man, I’ve recently taken an interest in flying quadcopters, I got a JJRC1000A to start off with and just learning how to get the damn thing to hover was a nightmare, it took me several weeks of playing around with it before I could fly it around my livingroom comfortably without constantly banging off walls and doors!!
Then I went out and bought the Syma X5C which I find a whole lot easier to fly, I’m able to cruise around outdoors with the Syma no problem at all.
But now I wanted to move onto something a bit bigger and better, also my dad has the Phantom 4 Pro which I’ve had the chance to fly it several times and it was an amazing experience, however, one thing that has me scratching my head with the Phantom, I thought with these high end drones like the DJI ones that the right stick that controls the left and right roll would always remain left and right regardless of the drones orientation, so you could just look at your display that’s connected to your controller and you’d be using that to know the drones orientation, I always thought this was how it’d be for flying FPV, or am I completely missing something?
I’ve searched all over the net to try and find an answer to this but I can’t seem to find anything at all, so I am hoping you could enlighten me here.
I mean surely people who fly in FPV through buildings around trees etc aren’t having to be thinking when and where those controls will be reversed, I figured you could use the display on the P4 controller for FPV instead of goggles??
Hope you get back to me, thanks in advance.
If I understand you right, you’re saying the phantom’s orientation with regards to the pilot is what controls what direction the pitch, roll controls move the quad? If so, this is called headless mode. Usually it’s only used for line-of-sight flying, because as you said, it makes fpv confusing. I’ve flown a Phantom 3 pro (iirc), and it didn’t do this, I suspect it is a setting that could be turned on or off somewhere in the labyrinth of the dji app. Don’t ask me how though, I don’t have a clue how those things work :)
It’s called headless mode. where no matter the orientation of the drone it will always move back if you move the stick in that direction. It is a setting.
Hey thanks for the help, i have a question though. i changed my rates. but i cant figure out how to get my “roll” to move only the quad right or left without adding in pitch. Right now as it stands my roll and pitch move simultaneously causing a front ward tilt when trying to “roll right”. is there a way to tune the quad so roll and pitch dont work together at the same time?
no they shouldn’t move the same time if you are only controlling pitch or roll :D
are you taking into account your camera tilt angle? with the tilt the quad will feel like it’s pitching and rolling the same time when you are doing a roll…
Yes im using the open source cx20 and i have an issue with the battery getting drained real quick like few seconds on giving it throttle. Just need to know what i can do to make it quit draining the battery and its fully charged.
Great article! Thanks for the help!
I am new to rate mode and have 3 modes setup (selected using a 3 way switch on the TX)
Angle and horizon “feel” fine but when I go into acro I do feel it needs a little expo
-possibly a mixture of me being new to flying acro and deadband being set at 6 because of jitter…mainly me being a ‘newbie’ thing though :)
I can fly helis so am kind of surprised I’m struggling a little- but my 250 quad seems more reactive/skittish than my Trex250 heli!
I have added some expo on the TX for AIL and ELE (15%) , but only when acro is selected and it does seem to be helping massively and I could possibly afford to lower it slightly – I can’t see how to only apply expo on the ‘acro’ mode in Cleanflight and leave angle and horizon without, so I guess I’m going to go with this method for now and slowly reduce till I have the skill speed and accuracy of BanniUK..(In my dreams!)
Weaning myself off horizon is the goal :D
Only way i can see is to have separate profile for different modes… but really you should get used to rate mode and completely forget about self-level mode :) All top pilots only fly rate mode.
I’ll challenge anyone who thinks they can LOS better through a proximity track without gyro. :D
It’s horrible for FPV tho :)
Nice compilation of tuning tips yet again!
Hey Oscar,
You have helped me countless times in the past, but in this case your post was detrimental.
mmix is now zero based instead of 1 based. If you define motor mixes starting from 1 it will not acknowledge them until you specify a motor 0 mmix. This can be very confusing based on your tutorial. Also: these settings are very helpful to know:
mixer custom
mmix reset
And finally, this website helped me figure out the issue I was having… so credit due: iforce2d.net/mixercalc/
Spencer
are you commenting on the right post? I don’t think I talked about mixer in this article?
I am assuming you are referring to the “custom motor mixer” post… that was written back in early 2015… cleanflight decided to keep changing things around (including the name of the function), being a part time blogger, i tried my best to amend it and keep it up to day… but there are times I just can’t keep up with things… so if there was any confusion caused I apologise.
I would also really appreciate it if you could point out which part of the article isn’t correct or clear… I don’t use mmix for a very long time and I start to forget about some of the details. (and that’s why I like to document/blog things)
Hi Oscar !
I dont speak well english and i am new with cf and naze32.
Your explanation of these are very easy to understand than cf docs.
THANK YOU!
Hi Oscar
New to quads. Just built 280 with scorpion motors, BL Heli 20 amp esc, Naze 32 ver6, dx8 tx, Orange 615x using ppm and Clean Flight set up. On throttle up the quad noses over. I rechecked setup and same results. In motors tab in cleanflight the motors do not come up even when using transmitter but come up even with master motor tab.
Where do I start looking for problem.
Thanks
Mike
Start with the simple things. Have you done a throttle calibration?
Hi Oscar,
Are your certain that throttle mid has an effect if the expo is off?
My mini quad is 7:1 power to weight and I have the crash on landing problem :) I tried throttle mid at both 20% and 80% and it didn’t seem to have any effect at all. I’m using luxfloat…
sorry yes, i should have mentioned throttle mid is only effective when you give it a bit of throttle expo :)
Congratulations for the excellent tutorials and articles técnicos.Qual would be quieter fee for “exponential” more suitable for one who never flew and will learn for the first time.
Exactly what I needed to read to fix my flight problems from last weekend. Thanks.
Hi Oscar,
I was playing with the Y/P/R rate lately. I was looking for the meaning of the numbers and still was not able to figure it out. In the CF forum, i found repeatedly, that the Y/P/R rate is multiplier. Well, i doubt that, because the default value is 0, as far as i can remember. Do you know, how these rates are processed in the PIDs?
Hi Ondrej, like i mentioned in the post, it depends on PID controllers, these rates don’t necessary affect PID.
for PID C 1 and 2, they only affect your stick sensitivity, saying they are multipliers so it’s easier to understand for people, it’s not like you really multiply the stick values with the Rate Number… no! :)
Not sure what you are trying to do… just turn it up or down to where you see fit :) for normal users like myself… i see there is no need to dig deeper than that unless you are a developer, or you have having massive problems with it…
I always tought it’s recommended to set Expo in the Tx and not the FC? Most pro pilots don’t seem to touch the Expo settings in Cleanflight at all.
HI Holger, everyone has their own way of doing things, end result is similar anyway wherever you are setting it…
I was curious about this topic and got an detailed explanation from joshuabardwell on why to prefer FC expo over Tx expo: rcgroups.com/forums/showpost.php?p=32705942&postcount=999
that’s a good theory and sounds legit to me :) thanks for sharing!