
Flying an FPV drone in 3D mode can be an exhilarating experience, adding an extra dimension to your flight by allowing your drone to invert and fly upside down, just like 3D RC helicopters. This tutorial will guide you through the steps to set up your FPV drone for 3D mode. We’ll cover the necessary equipment, configuration in Betaflight and BLHeli, and tips for your first 3D flight.

Here’s a demo video of the result:
Table of Contents
What You Need to Fly 3D with Your FPV Drone
- Reversible ESCs that support bi-directional motor rotation
- BLHeliSuite for ESC configuration
- Betaflight Configurator
- An arm/disarm switch on your transmitter
- Balls of steel (most important of all)
Configuring BLHeli
- Connect Your ESCs to BLHeliSuite.
- Remove Props: Always remove the props from your quad when connecting the FC or ESC to your computer.
- Set Motor Direction: Ensure your ESC allows you to change it to “Bidirectional”. If not, your ESCs probably don’t support 3D mode.
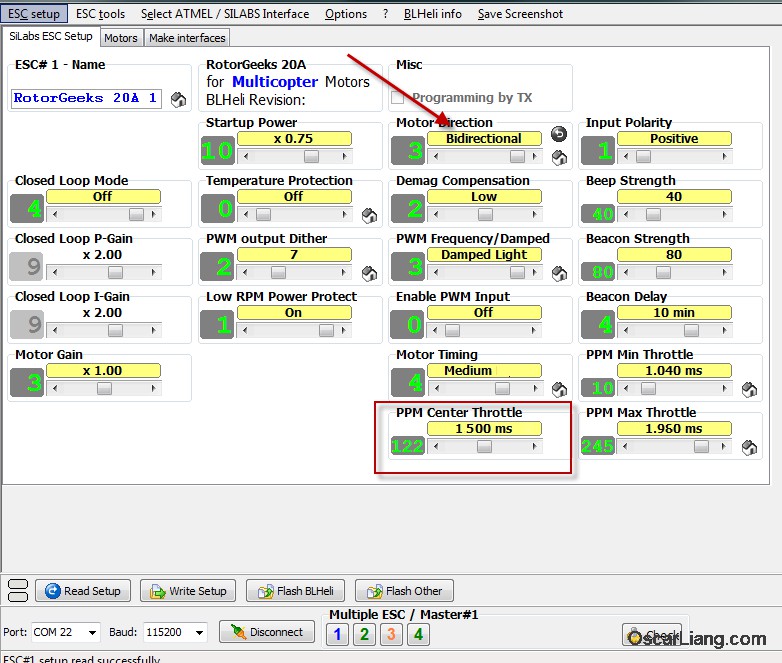
In BLHeliSuite, change the following settings for each ESC:
-
- Motor direction to Bidirectional
- PPM center throttle to 1500 ms
- PPM Min Throttle: 1040 ms (check if your ESC allows these values)
- PPM Max Throttle: 1960 ms (check if your ESC allows these values)
- Untick Programming by TX
- Motor timing to Medium
The rest leave to your liking.
Enabling 3D Mode in Betaflight Configurator
- Open Betaflight GUI: Check the 3D checkbox in the list of features.
- Set Throttle Deadband: In the 3D section, set the throttle deadband. I set mine to:
- 3D low: 1425
- 3D high: 1525
- 3D neutral: 1500
- 3D deadband throttle: 50
- Configure Arm/Disarm Switch: Set a switch to arm/disarm. You can’t arm with low throttle + right yaw in 3D mode.
- Set 3D Mode Switch: It’s important (but not mandatory) to set a switch to disable 3D mode.

Checking the Motors and Getting Ready
- Remove Props: Plug in a battery to your quad and connect it to Betaflight.
- Check Motor Rotation: Use the motor tabs to check if the motor rotation is correct. The motor sliders will be in the middle because of the 3D mode.
- Adjust Motor Wires: If any motors spin the wrong way, de-solder two of the motor wires and cross them. You can’t change it in BLHeliSuite anymore because the motor rotation setting is “bi-directional”.
I was using regular HQ 5×4.6 triblade durable props for testing, and they worked “fine”. However, normal props are designed for one-way rotation, and they perform less efficiently (drawing more current) when spinning in the opposite direction. So, you’d be better off using special propellers that are made for 3D flying. 3D flying is not very popular so it would be challenging to find them.
Also, I had a better experience flying with the camera level to the frame rather than angled.
First Flight Tips
- Test in Regular Mode: Fly your drone for a couple of packs first in regular flight mode (with 3D mode disabled) using the 3D mode switch mentioned before.
- Activate 3D Mode: While on the ground, set your throttle halfway before flipping the arm switch. This helps prevent unexpected behavior.
- Choose an Open Area: Fly in the biggest open area you can find without trees, people, or vehicles around. To give you an idea, even a 100m² area felt small for me on my first try.
- Short Inverted Flights: Run it upside down only for a few seconds until you gain more confidence. It feels a bit like rolling halfway and holding it for a bit.
- Disarm Quickly: When you freak out (and you will), flip that disarm switch up. Your natural instinct will be to drop the throttle all the way, but DO NOT do this, because this will invert your quad, sending it at full speed towards the ground or the sky, depending on which way your quad is facing. Remember that zero throttle is in the center.
Conclusion
Setting up an FPV drone for 3D mode can be complex, and learning how to fly in 3D mode is even harder, but it’s a rewarding process that opens up a new realm of acrobatic maneuvers. By following these steps and practicing regularly, you’ll be able to master 3D flying and enjoy the full potential of your FPV drone. Happy flying!
12 comments
“Balls of steel (most important of all)”.. where do I get them from? haha
I believe the eachine trashcan has reversible escs. Don’t quote me on it, but it worth a look, considering it’s quite a beast :)
I‘ve got a parkflyer, its jet style 250mm but a quadrocopter, it doesnt has any servo. it has two rear motors for yaw and speed and two reverseble motors inside of the wing. the two motors insode brings the air over the top or under the bottem gives pitch and roll.
its realy small but flight caracgeristics are well even a lot of wind doesnt bother it. benefit is flighttime. it works without gyro the wing makes it stable.
it was a 40buck pnp, with a 27mhz transmitter this ist the biggest issue… and its brushed. brushless would be more responsive and gives the power for fpv gear; a camvtx aio, without change flightcaracteristic…
i search an esc (and motors to max 1104- better less – witch is reversabel and works) a prop which is made for that. for replacing the two rearmotors 8520 and the reversable 0615. i think many motorless min parkflyers can be rebuild to well micro wing-copters. should this work in bigger size too? 5inch…
when i search micro 3d, goog brings qx90… it understand 3d as acro.
someone now a motor and esc small enough witch could work?
it works like a whoofer bid in the air.
Would you have a recommandation or link for 5 inch 3D propellers ? They seem quite rare !
If I hooked an ESC set in bidirectional mode directly to my receiver, how would it work?
Hi Oscar,
stupid question – what does the motor do at exactly 50% throttle? Does it stop, or does it spin with positive min-throttle to ensure full airmode control? If it spins at min-throttle, how is the transition to reverse? Is there a reverse-min-throttle, so it will never spin less than min-throttle-RPM, no matter what direction?
I am very very close to try on my Racer :-D
Thanks,
Michael
50% throttle in 3D translates to 0% throttle in normal mode :)
What about micro quads with reversible motors? Are there any besides the nano qx 3D?
Are there brushless escs for micro sized quads that can be programmed for bidirectional?
Thank you SeekND FPV!
Is the only way to tell if the ESCs are reversable by setting them bi directional in BLHeli? Or is there a list of known reversable? (I just installed Little Bee Pros) also I reverse my motors in BLHeli to save resoldering two of them, will that be a problem if I want to try 3D?
Also it might be helpful for some… When I was learning 3D on helicopters I set up a throttle curve in the TX that ensured bottom of the stick to mid stick was always centre pitch so flying in normal mode and 3D didn’t change the top half of the stick when I flicked the switch. It just enabled the reversed pitch which made transitions mid flight unnoticeable and it was easier to get used to the lower resolution and higher throttle stick position.
Awesome, didn’t realize it was this simple to configure. Is pitch also reversed when you are inverted?
No, generally the motors simply start spinning in the opposite direction.
There is one exception- Iirc it’s called ‘the Reaper’ and is the only collective pitch 3D quadcopter (that I’m aware of) that can do this.