
DShot is a new communication protocol between flight controller (FC) and ESCs, serving as a substitute for Oneshot and Multishot. DShot stands for Digital “Shot”.


Developed by Flyduino in collaboration with Betaflight, DShot is rapidly advancing the FPV drone community. Multishot was only recently implemented and adopted, and now DShot has emerged as a newer, better technology within just a few months.
Learn about ESC Protocols in this guide.
Table of Contents
Advantages of DShot
Compared to Oneshot and Multishot, DShot offers several key benefits:
- No More ESC Calibration Required: DShot eliminates oscillator drift, removing the need for ESC calibration.
- More Accurate ESC Signal: It is more robust against electrical noise.
- Higher Resolution: DShot provides 2048 steps compared to the 1000 steps of its predecessors.
- Faster Than Oneshot: DShot is significantly quicker.
- Safer: Each signal is checked by the ESC, which can detect and reject corrupted data.
So What is DShot, Really?
DShot is a digital protocol.
Standard PWM, Oneshot125, Oneshot42, and Multishot are all analog signals that rely on the length of the electrical pulse to determine the value being sent. Analog signals can have accuracy issues due to:
- Oscillator Speed Variations: Differences in the speed of oscillators (or clocks) in ESCs and FCs can cause inaccurate pulse length measurements, especially at the microsecond level. This is why ESC calibration is necessary to synchronize the oscillators.
- Electrical Noise: Voltage spikes can corrupt analog data, which is why some recommend a higher motor update rate than PID loops to improve flight performance. Repeatedly sending the same value to the motor averages out errors, increasing precision.
With a digital protocol like DShot, these problems are eliminated. Digital signals, composed of ones and zeros, are much more resistant to electrical noise, and ESC calibration is no longer necessary.
How Fast is DShot?
Options: DShot600, DShot300, DShot150
DShot offers three speed options, indicating the data sent per second:
- DShot600: 600,000 bits/sec
- DShot300: 300,000 bits/sec
- DShot150: 150,000 bits/sec
Calculate Latency
A DShot data packet consists of 16 bits: 11 bits for the throttle value (2^11 = 2048 steps), 1 bit for telemetry request, and 4 bits for CRC checksum (cyclic redundancy check).
For example, DShot600 has a frequency of 600,000/16 = 37.5KHz, meaning it takes about 26.7 microseconds to send a single throttle value from FC to ESC.
Speed Comparison
Here’s a comparison of signal speeds, assuming 100% throttle:
- Oneshot125: 250 us (microseconds)
- DShot150: 106.7 us
- Oneshot42: 84 us
- DShot300: 53.3 us
- DShot600: 26.7 us
- Multishot: 25 us
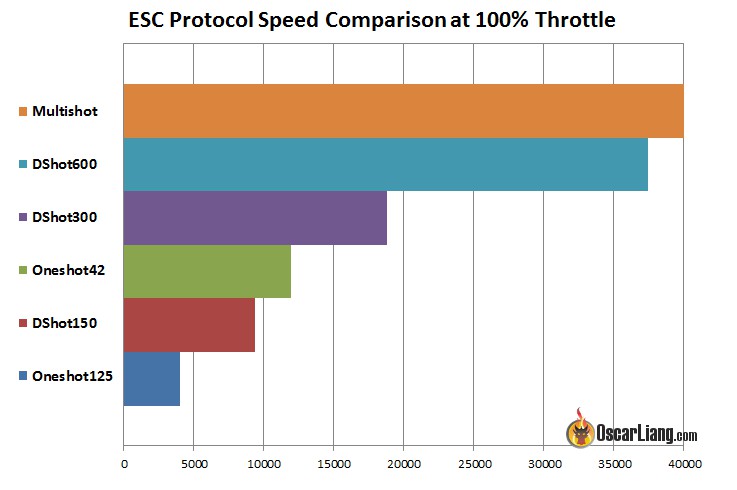
The fast transmission speed of DShot theoretically allows up to a 33KHz FC Looptime. Although DShot600 isn’t quite as fast as Multishot, its speed is sufficient as long as it’s faster than the FC looptime. Additionally, the other advantages of DShot outweigh the small speed difference.
What Hardware Supports DShot?
BLHeli_S and BLHeli_32 ESC
All modern ESC’s including those running BLHeli_S firmware and BLHeli_32 firmware will support DShot. Some older ESCs may have speed restrictions, only supporting up to DShot300 or even DShot150, but this is generally a concern for ESC that’s made in the last 5 years. All current ESCs using EFM8BB21x chipset support DShot600.
KISS ESC
KISS 24A ESC supports all three DShot speed levels and can be configured through their Chrome GUI configurator. KISS ESCs use STM32 processors, which communicate efficiently through a DMA controller, minimizing additional processing delay.
Flight Controller Requirements
All modern flight controllers can run DShot (F4, F7, H7 etc).
Here is a step by step tutorial setting up DShot on Betaflight.
Other Key Information
- To run DShot, no specific ESC configuration changes are needed in BLHeliSuite, the ESC can detect what ESC protocol it’s running.
- ESC calibration isn’t needed, therefore PPM_Min and PPM_Max in the ESC configurator are disabled when using DShot, as these end-points are fixed.
- In Betaflight, min_command and max_throttle are ignored with DShot.
- digital_idle_percent replaces min_throttle.
- unsynced_motor_output is removed for DShot, as it is no longer needed.
Between DShot600 and Multishot, DShot600 is preferable. If you can’t run DShot600, slower protocols like DShot300 or DShot150 are still beneficial. The shorter signal pulse width of Multishot might have slight improvement on flight performance, but DShot’s advantages on reliability and stability make it the better choice overall.
47 comments
Can Air 40A 600Hz 2-6s No BEC ESC use Dshot300 protocol
Please check with the manufacturer.
Mr. Albertson, did you ever get an answer about dshot specs. I have the same question, for use in a non aircraft application. I want to know what protocol to use to communicate with the ESC.
Hi Guys,
Could anybody help with “600,000/16 = 37500Hz = 37.5KHz. What does it mean ?
Does it mean 37.5kHz is required to transfer 16 bits, a packet ? However 1/37.5kHz=26.6us whichis 1 clockcycle. Doesnt it mean that it sends 1 bit in 26.6us and not a packet of 16bits.
Can it be the baudrate and not bitrate but everybody talks about bitrate and also in that case ( if we talk about DShot600) then a single symbol’s transfer rate cant be 1.66us.
i know i am mixing things up but cant figure whats that.
You forgot about the start and stop bits overhead required to send those 16bits of data.
You Wrote:
“600,000/16 = 37500Hz = 37.5KHz, which means it will take about 26.7uS to send a single throttle value”
Is there an actual document that describes this protocol somewhere?
I have been worki g on a heavy camera drone with 380kv motors 40 amp esc would a modern f7 flight controller with all in one esc module work with that big of a motor i just am frustrated with aurd pilot cant get it to work right..
Hi guys, am hoping for some help. I want to sue a single current sensing BLheli32 esc and 270kv 5045 motor in a low rpm Electric vehicle. But I need to manually drive it and I realise a servo tester (probably?) can’t do it.
Any hints or ideas for something similar to a servo tester or a nano?
I have been working on dshot from Arduino to an ESC and can drive it, however, is there no dshot reverse codes?
I.e. i can only rotate the motor one direction. Anyone have a esc firmware with dshot reverse option or know how to get a reverse / forward fast switching esc? my project needs to be able to have (no calibiration) forward and reverse control just like a regular brushed motor would do.
Thank you all for this enlightening conversation.!!!!!
How well does the higher resolution translate into the driving voltage for the motors? Don’t the ESCs have an 8bit DAC or something similar, thus not being able to provide the 2048 (or 1000 for that matter) speed steps? (not talking about the frequency resolution of the 3-phase bridges)
Does anyone have a link to the actual specification for DSHOT? I have an idea for using these DSHOT ESCs in a non-aircraft application. I want to try connecting my generic STM32 development board to an ESC to test out some ideas.
I have long experience with real time embedded development but new to RC hobby. The DSHOT idea has wider application to robotics, I think.
I can almost guess at the spec best on the description in the article (11-bits, 1-bit, 4-bit arc) but specs are better
What about the telemetry request bit? What is sent back and how?
Thanks
I have a bunch of questions.
People talk about analog and digital, but I’m a EE and I still am confused. Do ordinary (1-2mSec) ESCs simply filter the PWM signal with an R/C network and use the resultant analog value, or do they actually measure the pulse width against their internal clock?
I have some DSHOT ESCs, and when I connect them to a servo tester (1-2mSec pulsewidth) output with 20 mSec period, the motor spins but accelerates very slowly and never gets above about 25% of max speed even with 2mSec pulse width.
I thought that the newer ESCs were all backwards-compatible and would work with the “old
scheme. Am I incorrect?
And if all my DSHOT ESCs cannot be used with my flight controller (PixHawk), then would it be possible to flash different firmware into the ESC in order to make it compatible with my Flight Controller? The ESCs use a STF051K6 uC.
I have no idea why the author says that PWM is “analogue”. An analog control would be for example a voltage level (0-5V for example) that controls the motor speed.
PWM is a digital protocol as the pulses are either 0 or 1. The only problem with PWM is that that control pulses are repeated at maximum rate of 490Hz
A 1.5ms PWM control signal sends the data by how long the pulse is active. A 0% signal is 1ms and a 100% signal is 2ms. Although that is technically a digital signal (high/low), it is considered analogue since it is time based and not numerically driven. The source 1.5ms (50%) might be read as a 1.45ms (45%) if there is noise on the control signal wire or the timing is off on the TX or RX unit.
DSHOT is a true digital data stream not dependent on the pulse width, and it can digitally correct (or ignore) corrupt data with the CRC error correction.
Nice explanation ! To offer some further info, the PWM saga started in the old days with a control potentiometer (Throttle stick) with a DC voltage across it. The pot’s wiper was fed into one input of a comparator. The other comparator input was fed with a sawtooth wave. The resultant output was a PWM signal. Pretty simple stuff. So our PWM signal’s pulse width is narrowed or widened, determined by the voltage level on the pot wiper. I think some RC dude with not quite enough knowledge once started calling it an analogue signal and it just stuck.
Most PWM is generated from digital counters these days – so PWM is most likely numerically generated – gone are the days of monostables based around 555 timers. To be honest – there’s no real advantage to digital control that I can see – after all, is the stick input not analogue? Humans only perceive the world at around 50 Hz – so talk of micro second latency is pure specmanship – you cannot possibly notice it.
I’m using DYS XSD30A Blheli_S V2 esc’s to Kiss FC and I just need some clarification on DSHOT 600 Ready vs Support protocol. What exactly does it mean do I nead to flash them in order to activate the protocol hardware or not? And if so do I have to flash esc’s individualy with usb linker since Flydriuno does not support FC passthrough.
I currently run an F4 board at 8khz (125 µs). If my ESC is capable of DSHOT600, are there benefits to setting the speed to DSHOT600 in Betaflight versus DSHOT150? DSHOT600 (26.7 µs) or DSHOT150 (106.7 µs) are both faster than my board running at 125 µs. Although DSHOT600 will run faster than my FC. Will the ESC just work as fast as the FC allows within the protocols limitations?
If I couldn’t run DShot 600, I would personally rather run Multishot than DShot150 or DShot300.
I find the shorter signal pulse width has more noticeable benefit to flight performance.
The one think I dislike about the Hobby industry are the coining of new terms which actually have long since been around. BEC? is just a voltage regulator. OneShot? is like going from 14.4k to 56k baud. List goes on forever.
Still, a nice website!
OK guys, I’ve been working with real motor speed controllers up to thousands of Horse Power since 1981.. PWM Pulse width modulation is a method of transmitting an analog value across digital medium. PWM relies on only 1s and 0s, True and False, On and Off values. These values are then held within the time domain for interpretation. Example On 1/2 the time Off 1/2 the time translates to 50% of interpreted value.
The issue I’ve read with these circuits is the filter capacitors which are specified to filter out frequencies above the system’s working frequencies. Moving to DShot means the working frequencies will be higher. Therefore the existing capacitors would filter the actual signal. The microprocessors on these ESCs simply need different programming to interpret the new protocol.
This is like a mechanical engineer calling a DC armature a rotor and and a electrical engineer calling it an armature.. At some level the debate will depend on the background of who you are communicating with.
I have noticed many people in RC comunity are using wrong terms, speaking about Analog vs. Digital.
It’s simple: If value is subject to Quantization process so it’s digital value. And pulse width of PWM generated by MCU Timer is quantized value according to PLL freq used for the timer peripheral.
So, there is no active braking in Dshot, right?
No, DShot doesn’t affect Active Braking.
Active Braking is on by default in BLHeli_S, and you cannot turn it off.
http://intofpv.com/t-disable-active-braking-in-blheli-s
PWM sends a pulse of some duration which the receiver has to attempt to measure…It is one pulse…To detect the duration of that pulse is a challenge. DShot numbers come in a string of pulses of known widths at a known time…Detecting the value being sent by DShot is just detecting the number the pulse string represents. A much easier task. While PWM is a digital signal, the duration of the pulse is an analog measurement. You are both right.
Dear Sir,
Does Dshot600 work in Spektrum DSMX?
DShot is an ESC protocol has nothing to do with radio..
Mr Who asks: “But I still don’t understand why they have to reinvent the wheel. There are many possibilities to speak to electronic sensors/actors like SPI, I2C, UART, CAN…. So why DShot? Perhaps its easier to implement DShot in standard ESCs?”
One of the criteria was that it would work with existing ESCs. So that rules out SPI and I2C, since the connections aren’t easily available on standard ESCs. They also require more wires – who wants to connect up a bunch of wires to their ESCs? CAN is also not really suitable, since it would require require additional tranceivers on the ESCs (there are other reasons as well). All these ideas were discussed. See here for Felix’s comment on CAN bus https://github.com/betaflight/betaflight/pull/1282#issuecomment-252484173 and see other parts of that thread for discussion about other possible implementations.
DSHOT works with many existing ESCs, so many people can try it without buying new ESCs. And if they don’t like it they can go back to whatever they were using before.
Note also that DSHOT is currently alpha pre-release software, with all the risks that entails.
This is an excellent article, thank you for the information.
Question: You mention a resolution of 2048 steps. Will this be used in reality? Doesn’t the FC still communicate 1000 steps, or does this rather mean that the PID loop can come up with throttle values that have a much higher resolution than 1000 steps, making the protocol the limiting factor?
yes, RX talk to FC in 1000 steps, but FC can talk to ESC in higher resolution.
I think what he meant by 2048 steps is that the throttle value or resolution will have a possible value of 0-2047.
00000000000 = 0 Minimum or no throttle
.
.
11111111110= 1023 Mid throttle
.
.
11111111111=2047 Maximum throttle
Throttle here also means the amount of throttle that will fed to each motor (don’t get confused with the throttle applied to the quad together with the pitch, yaw, and roll)
Last 4bit how is calculated?
I don’t think this is correct –
11111111110= 1023 Mid throttle
11111111111=2047 Maximum throttle
A single bit error in the LSB would create an instantaneous jump of half the throttle range – that would be a very poorly designed protocol – I would think that using a gray code would be more suitable.
Most PWM is generated from digital counters these days – so PWM is most likely numerically generated – gone are the days of monostables based around 555 timers. To be honest – there’s no real advantage to digital control that I can see – after all, is the stick input not analogue? Humans only perceive the world at around 50 Hz – so talk of micro second latency is pure specmanship – you cannot possibly notice it.
Just a question, you said that PWM (FC to ESC), Oneshot125, and OneShot42 are Analogue signals. How did you came up with this conclusion when in fact they are all digital signals. The fact that the signalling is based from logic 1 and logic 0 makes them digital even if the timing is based on the length (or time domain) of electrical pulses or other sources. Also, pulses being fed to ESCs come from the flight controller so there is absolutely no way it is in analog (unless an DAC is explicitly used). I may be wrong but this is simply different from what i know of DSP.
Again, I maybe wrong or the term “analog” was used in a different context so please enlighten me.
Apple flavoured water is still water, doesn’t make it apple juice :) PWM is a analogue signal that is encoded in digital form but has a varying pulse width, so indeed it does possess some properties of digital signal, but in our context (compared to DShot) it is an analog signal.
And try to call Oneshot “DShot” LOL
I have to agree with Brian. PWM is digital. It only consist of 1 and 0. An analog signal has something in between. When I got your article right the new thing about DShot is that you use some kind of protocol where you actually transfer data and don’t have to measure the time between the 1s and 0s. I like the idea to use a protocol to speak to the ESCs.
But I still don’t understand why they have to reinvent the wheel. There are many possibilities to speak to electronic sensors/actors like SPI, I2C, UART, CAN…. So why DShot? Perhaps its easier to implement DShot in standard ESCs?
MisterWho
Wrong. PWM signals are analog. Analog or digital is not about the waveform, it is about what aspect is used to encode the data. PWM signal uses the ‘width’ of the waveform to represent values, longer the width, higher the value. true digital signal uses just binary system to represent values, no other physical characteristic of the signal matters except for on/off status. Saying PWM signal is digital is like saying Morse code is digital. They are all analog as a physical characteristic of the waveform is used to determine the value.
PWM signals are discrete – the width of the pulse caries the information. A pulse can be generated by analogue (a 555 timer for example) or numerical (digital logic) methods. Can we stop arguing now? ;-)
Sorry, PWM is digital. An analog signal would be like some RX with RSSI that supply a 0 to 3.3v output. An ADC will read the analog value and turn that into a number. While PWM is the length of being on or off, it’s strictly digital. It’s 100% wrong to say that PWM is analog, it’s 100% digital.
The reason DShot works better is because of the checksum, not because it’s more digital than PWM or Oneshot. If DShot was just sending a digital signal without the checksum, it would have errors just like PWM or an analog signal from interference. And, it would have a higher chance of errors as those on and offs are happening quicker. This is why Oneshot42 has more problems than Oneshot125.
As Oscar said, OneShot is analogue, because it measure the length of signal, it doesn’t interprets the low and high voltage level as digital bits!
On the other hands, dshot doesn’t care about how the signal looks (how long it take…) but it looks only if it’s high or low and then translate it to bit’s and put together to message…
Interesting to read about this… I was just thinking the other day about modifying BLHeli to receive data over a soft UART which would achieve much the same result.
Regarding Brian’s question about analogue, the ESC protocol very much is analogue.
The signal might be communicated as a a pair of transitions between 0 and 1 as far as both CPUs are concerned, but it’s not the value that matters, it’s the time period between them and that is analogue. It is very unlikely that the ESC will receive the same value that the FC sent. Sure, you can approximately repeat the same time duration on the FC by sending the same value, but actually that duration might well not be the same due as the clock frequency of the crystal could be slightly different depending on slight changes to temperature, parasitic capacitance or even vibrations. Even the length and type of the signal wire to the ESC can affect the rise and fall rate of the ANALOGUE voltage and so change the apparent duration of the signal.
What is almost certain, however, is that the clock speed of the receiving ESC will be slightly different to the FC, and this will lead the same period of time being interpreted differently to what the FC sent. The main challenge of any communication system is making sure that there is some way of synchronising the receiver to the sender. For instance, with RS232 communication, you sychnronise by watching out for the start bit, wait half the duration you expect a bit to last, and then sample the bits you want at the sample rate, so that you’re reading the signal at approximately the middle of the bit each time.
This is why you will typically have a PWM value below which you consider it at minimum value and another above which you consider it maximum. If you have a transmitter that can display the values it’s sending, e.g. a Taranis, you can see the PWM values it thinks it’s sending and then look at the values CF has received (look in the recceiver tab) and they’ll be different.
This is the problem DShot aims to solve. With digital, it’s simple: 0 is off, 2047 is maximum. There’s absolutely no ambiguity.
This is my first time here. I’ve been involved in electronics hardware and in later years, firmware, for over 50 years now. I started writing brushless ESC code in assembly language from the ground up about 10 years ago and interfacing to ESC using a pseudo 16bit SPI interface (2 x 8bit) with 1Khz update rate.
I do have to question the use of the term analogue when describing PWM though.
I’ve noticed over the years that even this term itself has been misused and used in place of the correct term PPM (pulse position modulation) when referring to servo or ESC input interfacing.
I prefer the original terms PPM for the input control to a servo or ESC and PWM for the ESC’s internal mosfet switching speed control. This leaves no doubt as to what you’re talking about. Using the one term PWM only, to describe both, creates confusion. It reminds me of the misuse of the term ‘analogue’ when describing the old rotary
dial phones. The misuse here is the fact that these old phones were actually digital dialing systems and the push button phones of today are in fact the analogue tone dialing sytems. Not the other way around. The reason for the wrong use of technical terms is because non engineering people get hold of these terms and change them to suit their ignorance.
A really good example of this is the use of the term ‘hard drive’ which no longer refers to an actual 1TB Samsung hard drive but a whole damn desktop computer. WTF is that about ? Well some admin lady somewhere thought it would be a good idea to change the meaning.
Don’t start me on the new terminolgy for a quadcopter ie. ‘DRONE’ WTF again ?
Back to PWM or PPM: The information which you wish to convey using this signaling system is simply determined by the width of the pulse. How you determine what this pulse width means to you, is in fact up to you.
1ms to 2ms pulse might be translated into an analogue voltage of 0 to 5 volts or whatever you like. It could be interpreted as a 0 to 255 8bit digital value or even a 0 to 65535 16bit value. 16bit resolution of course would be very poor due to jitter problems. My point is, it can be what ever you want it to be.
So the author here has chosen to use the term analogue. This is what it means to him and I’ll give him the of benefit the doubt though, as he makes up for it in his wealth of knowledge in ESC technology. By calling PWM analogue, I do think he is trying to differentiate between a purely N-bits serial digital signal and an historic pulse width analogue of the information to be conveyed type signal.
I appreciate your comment. And indeed I am trying to draw a line between traditional ESC protocol, e.g. PWM and Oneshot and the latest DShot protocol. And you are right, this same topics has been discussed a million times outside of the quadcopter hobby I am sure, it all depends on what angle you look at it :)
Oscar,
I’m a little late to this party, but I do have a Dshot question.
Is there any reason to ever choose a lower Dshot protocol other than hardware limitations?
Just follow Betaflight Dev’s recommendations: 2K looptime => DShot150. 4K => Dshot300. 8K =>DShot600.