You can record real time telemetry data in your radio in a CSV file, such as GPS coordinates which can help you find your downed model. Other uses include logging receiver LQ and RSSI changes over time to look at radio link performance during flight. In this guide I will show you how to log / record any telemetry data in your EdgeTX/OpenTX radio.

Before we begin, make sure you’ve setup Telemetry, here are the tutorials in case you haven’t done that already:
If you want to log GPS data, you also need to setup GPS first: How to Setup GPS.
Table of Contents
Discover Telemetry Sensors
Power up your quad (to power your receiver and GPS if you want GPS related telemetry data).
Go to the Telemetry page in your radio by pressing the Model button, then press the Page button a few times. When you are in the Telemetry page, scroll down and select “Discover new sensors” option.
If GPS is setup and working, you should see all the GPS related sensors added to the list, including the coordinates.
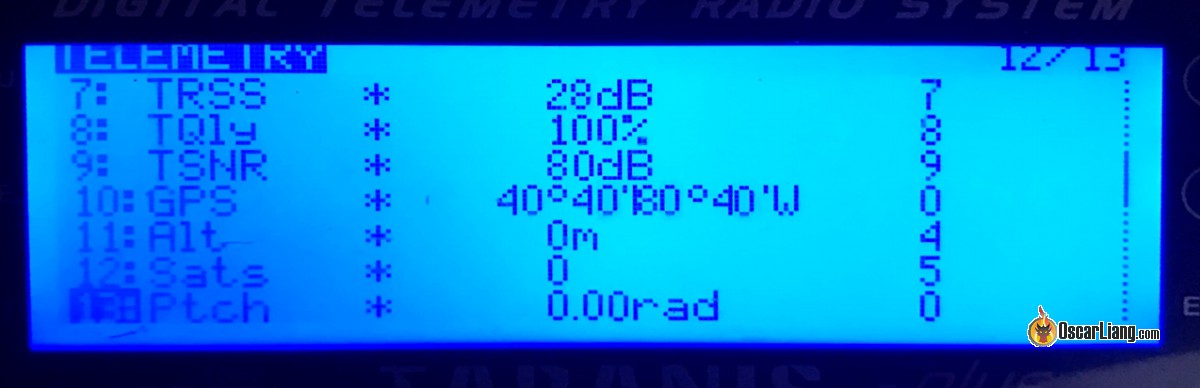
* GPS coordinates might appear to be 0 if the GPS receiver has not got a satellite lock, don’t worry, just be patient and wait for a lock. As long as these sensors are there, you are all set!
Enable Logging
To enable telemetry logging in an OpenTX/EdgeTX radio:
- Go to Special Function page
- Assign a switch to start the log – you can also just use the arm switch so it starts logging as soon as you arm, or you can select “ON” instead of using an switch, which will always log data when the radio is powered on but this might fill up your SD card without you knowing (the logs files are relatively small in size so it will take a while to fill up). Or you can select “TELE”, which means it will start logging when a receiver connection is established and telemetry data is coming in
- Select function “SD Logs”
- Choose a value, which is how frequent you want to log the data. Depending on what kind of data you intent to gather, for GPS stuff I think 0.5s, 1s or even 2 seconds are a good starting points. For radio link information maybe you want more frequent update to check for spikes in RSSI and LQ. It really depends on what you need.

Pro Tip: For a more sophisticated approach to activating logging, consider creating a logical function that operates under an “AND” condition for the arm switch and TELE variable – this would only initiate logging when both the arm switch and telemetry data are active simultaneously.
It will basically log everything in your Telemetry page into a CSV file.
You can choose what data not to collect by simply go to the Telemetry page, and edit the telemetry data you want to remove from the log by unchecking the “Logs” option. By default, all telemetry data have the Logs option enabled and will be recorded.

Access Telemetry Log
The log file is saved in the “Logs” folder in your SD card, the file name follows this pattern: model name-date time.csv
If you don’t have access to a computer in the field, most smartphones with micro SD card slot can read it as well.
The log is in .CSV format, which can be opened in Excel like a spreadsheet.

Or you can also open it in a text editor, the values are separated by comma.

You can also open the log in OpenTX Companion, it can create some pretty useful graphs.

How to Check GPS Coordinates?
If you crashed your drone and not sure where it is, you can try to find it by looking up the last GPS coordinate. Simply copy the coordinates into google map and it will show you the location. There are other ways to find a lost quad too.
You can also work out the travel direction before the crash. Simply go back a few seconds and copy the coordinates into google maps. The line between the two locations would be the travel direction.
You can even plot the whole flight path with the coordinates on Google Earth!
Edit History
- Nov 2018 – tutorial created
- Jan 2023 – updated guide, shortened URL
22 comments
Hello there, just a question about crossfire settings.
Does it have to be set to “cut motors” for the RTH to engage?
thanks
No, it’s not necessary. The receiver should tell the FC specifically when it’s in failsafe.
Finding the last position in the logs is too difficult. I use these LUA Telemetry scripts:
https://github.com/moschotto/OpenTX_GPS_Telemetry
https://repository.justfly.solutions/index.php/lua-scripts?view=product&id=125:open-location-code-google-plus-code
Especially the second one is amazing as it shows the last known GPS coordinates and Google+Code that you just put into the Google search and you have the position right away ;)
How do you use them?
I converted this second script into EdgeTx widget, so you can use that, all is explained in this github repo:
github.com/juricabi/EdgeTX_GPS_Plus_Code_Widget
what does rss rsnr rfmd 2rss tsnr etc. stand for? thanks!
Thank you for this excellent tutorial Oscar. I just did a build/review of the GepRC Moz7 and I included GPS setup in that video, but since the video was already so long (30 minutes, 18 chapter) I ended doing just a quick overview and sending people here to your excellent tutorial. No need to re-invent the wheel…https://youtu.be/njx3R_Carqg
I have a telemetry logging issue.
GPS coordinates. speed and altitude are not updated every second, but every 7 seconds. So that if you combine it in Dashware, you will see that the data jumps. I use Radiomaster Zorro ELRS.
How to fix it?
Anyone know why in the logs my gps coordinates are displayed in the altitude column? I am not able to log the flight path in google earth because of this! Please help
To those of you saying gps coordinates are different or innacurate on your telemetery screen vs your osd. I had the same issue. The gps coordinates are in fact correct, they are just in a different format. Here is a conversion tool! pgc.umn.edu/apps/convert/
Will the SD card fill up and cause an issue unless logs are manually deleted? Any automatic way to avoid the need to do this if so?
I too have inaccurate telemetry GPS coordinates on my transmitter but with my OSD and beta flight configurator it is correct how can we get this corrected on the transmitter telemetry screens I’ve read several people have the same problem I have several set ups on several drones and the same problem I need the telemetry on the transmitter in case I crash because DJI goggles does not play the telemetry OSD back
hi, Betaflight doesn’t list GPS sensor data in sensors tab in OpenTX, is this an issues with the latest Betaflight versions? iNav list the GPS sensor just fine.
Did you click “discover new sensors”?
Hi Oscar. My taranis displays different gps coordinates than betaflight. Is there anything I can do about this?
Thanks so much for the write up!
Cannot get my GPS to log to the taranis radio, BN220 is the GPS unit. The only sensors I see on telemetry screen are RSSI, RXBT, Temp1, VFAS, A4, Fuel, Hdg, Accx, Accy, Accz, Curr, Temp2, So I dont think any of those are related to the GPS if I am correct. I have done new sensor searches a number of times but the above list is all it finds.
I am assuming the wiring is correct as it operates as it is supposed to, gets the satellites, will bring the drone home on fail safe, shows relative info like coordinates in OSD display on googles.
This info is just not getting back to the Taranis. So my theory is the info is going through to video transmitter to googles OK but not the radio transmitter to Taranis. Either the fault is in the Taranis or the radio transmitter. Since a search for sensors on the Taranis cannot find the GPS then the signal cannot be getting transmitted, although all the other sensors are transmitting? So not sure where to go from here.
Hey, if you want to display your flight path on google earth with altitude and speed colorizing check out my tool github.com/naice/OpenTXLog2GoogleEarth maybe you also want to add it to your blogpost?
I also write a tool to convert the GPS data in gpx format and view the flightpath in 3D: pixelkrams.de/otxviewer/
To convert multiple EdgeTX files (one day) into one (liken opentx): pixelkrams.de/otxviewer/convert.html
Everytime I search my questions on google, I end up here. Thanks for your work!
Maybe useful in case of an crash….
Taranis X7 GPS last positions Telemetry Screen
github.com/moschotto/Taranis_X7
Is there a way to view the last known few GPS entries to the log file from the radio? Such as the x9d or Horus running openTx.
Do you have a workflow for plotting the entire flight into google maps ?