
Not only you can crash your drone mid flight when voltage drops too low, over discharging LiPo battery can also cause permanent battery degradation or even damage. To keep your batteries in good condition, it’s important to avoid over discharging them by monitoring voltage while flying, and know when to land. In this article, I’ll share with you the ways that can help you in monitoring battery voltage and deciding when to land your drone.

If you want to learn how to handle LiPo batteries safely, check out my beginner’s tutorial: https://oscarliang.com/lipo-battery-guide/
Table of Contents
Understanding Battery Voltage
The most common way of determining when to land is by checking battery voltage on the fly.
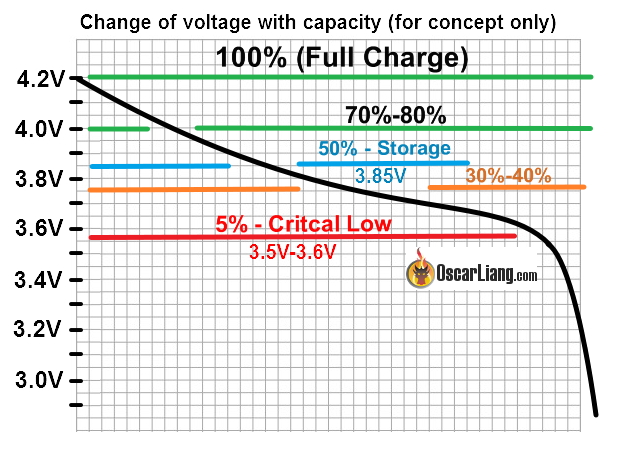
At 3.5V per cell, approximately 10% of the charge is left, so that’s a good time to land your drone. For batteries of different cell count, the total voltage is different at 3.5V/cell:
- 1S – 3.5V
- 2S – 7.0V
- 3S – 10.5V
- 4S – 14.0V
- 5S – 17.5V
- 6S – 21.0V
Some might land at 3.3V per cell, and some even stretch their battery down to 3V per cell before landing, it’s all up to you how much you want to abuse your properties. The more you abuse your LiPo, the faster it degrades, and also a higher chance of over discharging it. The more you take care of your lipo the longer they will last.
However, for tiny whoops, because they use little 1S batteries, the voltage will sag noticeably more than bigger batteries. So it’s normal to land at 3.2V or even 3.1V per cell, and after some 10/15 minutes of resting it will come back to around 3.5V.
For Li-ion batteries, they are safe to be discharged down to 3.0V per cell (some can go even lower without negative effects), refer to their specifications.
OSD
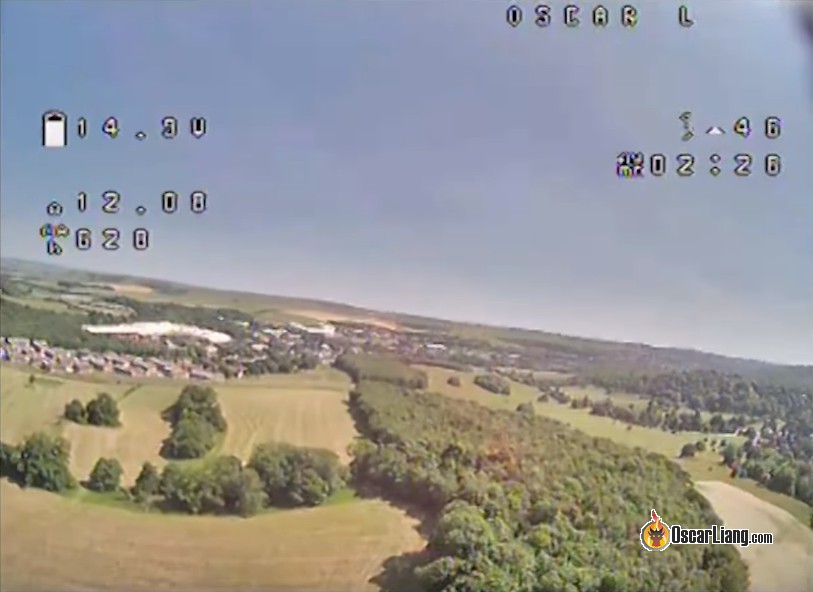
The most common way of getting battery voltage is by displaying it in your FPV Goggles’ OSD.
There’s a voltage sensor in your flight controller, it can read battery voltage and send this information to the goggles to be displayed. While having the voltage reading on your video feed allows you to monitor the voltage easily, sometimes you might neglect the reading if you are too focused on the immersive FPV.
Radio Read Out
You can also send the voltage reading to your radio transmitter if it has a telemetry support, you can then play the voltage value via audio, this is great solution if you don’t have OSD, and you get to know what the voltage is using a switch. You can also set a threshold and get your transmitter to read out the voltage once it hits the threshold.
Many radio transmitters can display battery voltage on the screen. The Frsky Taranis can even be configured to speak vocal alerts and read out voltages.
Monitoring the Current Drawn
Due to voltage sag, battery voltage can fluctuate when you change throttle. By monitoring how much battery charge has been consumed gives you a more accurate idea when you should land.
Current drawn is measured by a current sensor usually connected to your FC. Similar to voltage sensors, you can display the current drawn on your OSD by enabling the “Battery mAh consumed” element.
The 90% rule… You should land when you have used 90% of your battery capacity! At this point the battery should theoretically be at around 3.5V – 3.6V.
While it can be a more accurate metric than voltage for deciding when you should land, you should calibrate it first to ensure it’s reporting the correct reading: https://oscarliang.com/current-sensor-calibration/
Also, it works only on fully charged batteries, since you wouldn’t know what is the balance left in the batteries. If you disconnect the battery, the reading will reset itself instead of continuing from where it was.
For these reasons, you should still use battery voltage alongside mah consumed.
Considering the pros and cons of both voltage and current sensors, I strongly recommend you to use both sensors to decide when you should land your drone.
Voltage Alarm
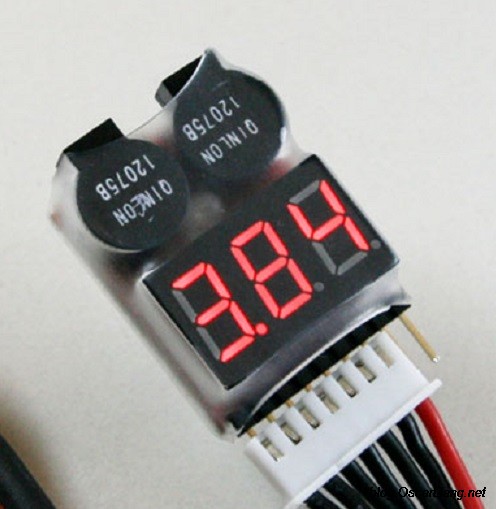
Don’t have a voltage sensor nor current sensor? Don’t worry, you can get a voltage alarm, which connects to the balance plug of a LiPo battery. They are cheap and easy to use. There’s no technical setup, you simply plug it into the battery and that’s it.. The buzzer is triggered when any cell drops below a set threshold.
Where to buy?
- AliExpress: https://s.click.aliexpress.com/e/_DeLhYOb
- Amazon: https://amzn.to/3webycf
Timer
Don’t have any sensors and don’t want to spend money? Use a timer!
Timer is a primitive method for determining when you should land, as it doesn’t take into account how much throttle is being applied. For example if you are flying aggressively and performing acro moves, your flight time will be much shorter than just hovering in place the whole time. But if you are just cruising around in calm weather, you will be surprised how similar your flight time is.
For me, timing flights is a last resort when there really are no better options.
Edit History
- Dec 2014 – article created
- Aug 2016 – Updated info about telemetry
- Dec 2017 – Updated info about current sensor
- May 2024 – Updated
10 comments
Hi mate, I’m flying a 1S Mobula7 tiny whoop. I’ve noticed that the battery voltage remaining displayed in the OSD of my goggles is always 0.2V lower than displayed on my TX16S RxBt home screen widget. Any idea why? Thanks!
Hello Guys, I have notice that in my OSD say3.3 or 3.5 and I land immediately… But I check the same battery and checker say taht voltage is 3.7 o 3.8… does it normal?…. or do you know what happen?
Yes it’s normal.
Hi thanks for generous info.
I find the mah used the most useful indicator . I fly in thermals so flying time varies a lot and I need to know when to leave a thermal , some times from some altitude. One plane configuration is light with a small motor ( power 500 mah and camera /vtx 370 mah ) and no osd or gps or battery sensor . This is very good flying ( I am often joined by hawks and kites ) but some lightweight equipment would be helpful. I dont want to get into a negative spiral of adding weight to cope with weight .
Super light jst connector battery sensor for consumption please!
Hi Oscar;
I just commented on your article about my Battery Buzzer, at the bottom of the page on “Get Longer Flight Times” I found this article of yours: “Monitor battery Voltage”…! The first Buzzer is just like mine, so I’m sorry to bother you with my question, also my Pixhawk PX4 I think Monitors Voltage, I also have Telemetry, and I’ll be adding OSD later…! Plenty of ways to skin a Cat..!
James….
Hi Oscar,
What do You think of this product?
I’m from europe and shipping nearly double the price.
I don’t like the talking Taranis telemetry and my simple osd is influencing my video quality.
Wondering if the FLEA would also have a negative impact on the video or not.
Great work you are doing here…
ebay.com/itm/Meet-Flea-battery-telemetry-for-Fatshark-Dominator-maximize-flight-times-3s4s-/321826519999?hash=item4aee5afbbf:g:zEoAAOSwd0BVxPnp
Hi Oscar,
I noticed there’s no mention of current here. I find a current sensor to be more valuable than voltage, as I can sag voltage pretty quickly while still having current remaining. Current gives me an idea of how much longer I can fly (even if I have to back down a little). Voltage can do similar, but is far more crude and depending on too many things.
You mean battery capacity? yes it might work too, but capacity used/remaining is an estimation which depends on a lot of factors, so i won’t use it alone as a signal to land. I think voltage still a primary indicator.
Thanks for this Oscar. I have a buzzer like the one shown in your picture, however my balance lead is already being used to power my FPV gear. Do you know of a way to split the balance lead so i can also attach a buzzer? Thanks again.
sure, maybe some DIY an adapter for the balance plug or the XT60 plug to power your FPV gear? while available for voltage alarm?