FPV drones blend high-speed flying with rapid direction changes. A key drone configuration decision is the propeller spin direction, known as “Props In” and “Props Out.” Understanding these configurations can significantly impact your flying experience. This article discusses the pros and cons of each.


Table of Contents
What’s “Props In” and “Props Out”?

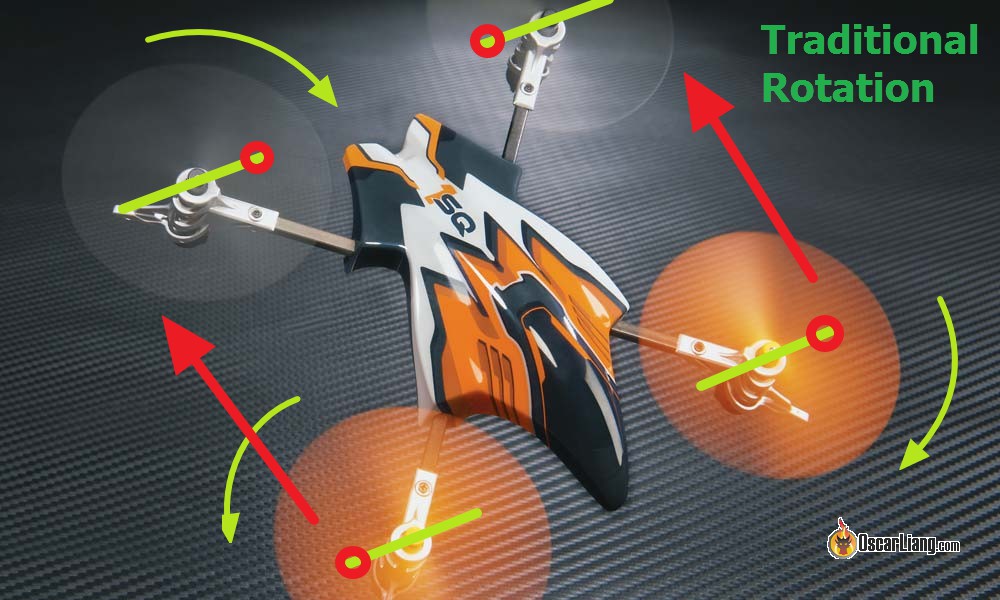
Props in (also known as “standard” rotation): This is the more traditional configuration where the propellers at the front left and rear right spin clockwise, and the propellers at the front right and rear left spin counterclockwise. It’s the default in most flight controller software. And since front props spin towards the lens, it’s also called “props in”.
Props out (also known as “reverse” rotation): In this setup, the rotations of all the propellers are reversed – the front right and rear left propellers spin clockwise, while the front left and rear right spin counterclockwise. As the front props spin away from the camera lens, It’s also known as “props out”.
Which Is Better?
Both configurations will take your quad to the sky just fine, no configuration is inherently superior. But understanding the benefits and downsides of each configuration will help you make an informed decision.

Props in Pros:
- Familiarity: Many pilots find this setup more intuitive, as it’s the traditional and default configuration used in most drones and flight controller software.
Props in Cons:
- Debris on Lens: There’s a higher chance of debris being thrown towards the camera lens, which makes the lens dirty over time
- Prop Wash: Props in configuration can sometimes lead to more prop wash, where the drone flies into its own turbulent air, potentially affecting stability.

Props Out Pros:
- Enhanced Control: The reverse rotation can provide better control, especially in tight turns. The benefit and effect is especially noticeable for smaller quadcopters, like tiny whoops and other micro quads with low toque motors.
- Less Obstruction: Lower chance of obstruction by branches and racing gates, as it would just bounce off obstacles in collisions.
Props Out Cons:
- Debris on FC/ESC stack: There’s a higher chance of debris and dirt being thrown towards the FC stack
- Adjustment Period: Pilots accustomed to the standard rotation may require time to adapt to the props out configuration.
- Turtle Mode Issue: When you use turtle mode, the props runs the opposite direction when you are up side down, and so you are more likely to get your lens dirty.
Making the Choice
The decision depends on personal preference and requirements.
For tiny whoops and micro quads, props out is recommended.

For anything larger than 3″, like a 5″, I am happy to just run the default props in because the benefits in flight characteristics are less noticeable. And I don’t have to constantly remind myself to re-configure the drone after updating Betaflight. However other minor benefits still remain true such as less dirt gets thrown at the lens and less likely to get obstructed by branches and racing gates.

If your drone mostly hovers at the same spot, like a DJI Mavic does, then props in or props out make little difference.
However, if you encounter strange flight behaviour and issues, especially in cinewhoops, it’s worth experimenting with both props in and props out configurations, this often is the fix.
How to Reverse Motor Rotation
By default, Betaflight runs “props in”. Some BNF (bind and fly) prebuilt drones might come pre-configured as props out in the factory.
To configure your drone to run “props out”, you need to go to Betaflight Configurator, Configurations, under Mixer, enable “Motor direction is reversed”.
Then follow this tutorial to reverse the motor spin direction: https://oscarliang.com/change-motor-spin-direction-quadcopter/
Conclusion
Whether you choose props in or props out, understanding the implications of each setup is key to optimizing your FPV drone’s performance. Both configurations have their merits and can be effective in different scenarios. Ultimately, it’s about finding the balance that works best for your style and needs.
Edit History
- Jun 2017 – Article published
- May 2019 – Updated guide
- Jan 2024 – Updated guide
22 comments
I’m Curious, thinking back on my years as an instructor and as a turboprop captain. All propeller aircraft. How does P factor affect the quad copters stability? With the props out configuration it seems like P factor would cause the aircraft to roll with increasing airspeed.
Does reversing the props mess up a good PID tune?
Thanks, Very helpful. By chance have you ever done a writeup on your favorite settings for a tiny whoop? I just bought cinelog 25 and forgot to save off the factory settings before reflashing.
Cinelog25 is not a tiny whoop, it’s a cine whoop
GEPRC provides all drone factory settings as download.
UAVTech preset for cinewhoops is equal if not superior to GEPRC factory tune.
Happy flying.
I know this is the silliest of reasons, but I did this for the sound. Props Out quads sound better when making a banked turn. Props In tend to have the back outside motor do all the work in a fast turn, and it kind of makes a whiny noise.
I fly “tiny whoops” and toothpicks with brushed motors and flight controllers that use the Bayang protocol and Silverware firmware (which is preconfigured). I have physically moved motors/props around to get the “props out” configuration, but the quad spins (continuous yaw) . In your article, you indicate that the firmware yaw setting needs to be changed and you show changing it with BetaFlight. “Lite” (Bayang) flight controllers do not have USB or header to connect to PC. I have one FC that I have added a header connector to for flashing the firmware. Can BetaFlight be used to modify the Silverware firmware? If not, how would I make the suggested changes?
Thanks.
I don’t believe it’s possible, if they are not loaded with Betaflight, or control firmware that allows you to change configurations.
Ok so you need to reverse motors in Blheli to physically get them to change rotation direction and then in betaflight (either by change rotation in config or via command line) so betaflight sends correct signal commands to the motors?
Also swap motors around to have the correct threading for the direction of prop rotation.
No swapping motors, no blheli. Just use the motor wizard in betaflight configurator.
I’m in the process of putting together my 1st quad and was looking into what way the propellers should spin and why before I got started… Do you know why the convention of having the front props turn towards the chassis was established in the first place?
Thanks, Jamie
I need to reverse directions on a tricopter using iNav too can it work?
I don’t know if this is another Betaflight change (now on 3.2.1) or if it is specific to my quad, (an Awesone Q95), but I also got the Invalid name error when trying to input the yaw_motors_reversed = ON command. Using the yaw_motor_direction = -1 worked for me.
I’ve run all my setups this way since I discovered tiny whoops two years ago… Betaflight 3.2.0,
The CLI command is yaw_motors_reversed = ON
I tried using yaw_motor_reversed, and got an invalid name error. I did a dump check, and discovered it’s “motors”, not “motor” in the CLI command.
Oscar, could this be a typo in your tutorial? Or maybe Betaflight changed it for 3.2.0? As I remember, 3.1.7 was still “yaw_motor_direction”. Anyhow, cheers Oscar! I love what you do!
thanks yea it was probably a typo, i’ve fixed it now.
I installed my motors ESC’s and they’re spinning reversed. I can’t access BLHeli32 to change direction(or even get dshot600 to work). I know that I can swap two motor cables to change direction, but I’m pretty happy with the wiring as is. I googled reversed props and found this great page. Will right and left hand threads on the prop posts have any negative effect here? I have directional threads and I think I might have to swap all of the motors now to run reverse prop direction without the props and nuts flying off. Is thread direction an important detail to pay attention too here? I’m new to the hobby. Thanks.
It’s best to install them correctly according to motor spin direction. It ensures your props won’t fly away during flight. But if you check that pre-flight everytime then it’s not really that big of an issue :)
Hi, i want to do it with my Kiss fc, is it possible?
Is this just for pure x quads or can it be applied for stretched? Thanks
it’s for all frames.
How about reversing by way of wiring the ESCs and then setting yaw_motor_direction -1?
Have just implimented this on my quad, am always cleaning grass off my lense, thanks for this
Regards
Peter
sorry you don’t get it :)