
In this tutorial, I’ll demonstrate how to reduce throttle sensitivity in Betaflight as well as on radios running EdgeTX. These tips aren’t just beneficial for beginners; experienced pilots and racers can also benefit when flying in tight spaces that require precise throttle control at slower speeds. If you’re struggling to manage altitude on your FPV drone—perhaps your quad feels too powerful, jumpy, or twitchy on throttle—this guide is for you! This is a common issue among beginners flying in Acro mode, where there’s no automatic altitude hold. Fortunately, there are effective ways to make your throttle easier to manage without negatively impacting overall drone performance.

Table of Contents
How Throttle Scale Helps New Pilots
Throttle scaling can be especially useful for FPV beginners. A typical FPV drone has an extremely high thrust-to-weight ratio, hovering around 20% to 30% throttle. Beginners often find this challenging, as they’re still developing precise control, resulting in difficulty maintaining stable altitude due to the tiny throttle stick range they’re comfortable using.
Benefits of reducing your drone’s throttle output:
- Reduces twitchiness and overcorrection.
- Provides finer control and increased resolution on the throttle stick.
- Helps develop muscle memory for smooth throttle control.
However, relying heavily on throttle scaling might limit your ability to develop as a pilot. Ideally, you should embrace this challenge by gradually increasing your throttle limit as your skills improve. Eventually, mastering your drone at its full 100% throttle range is the goal.
That said, if excessive power negatively affects your enjoyment or creates frustration, throttle scaling can be a valuable tool. Ultimately, prioritize your flying experience and growth as a pilot, but don’t shy away from incrementally challenging yourself.
Experienced pilots and racers also benefit from throttle scaling. By reducing maximum throttle, you can improve precision in challenging environments, such as technical race courses or tight flying spaces where maximum throttle isn’t needed, but fine control is essential. Throttle scaling maximizes stick resolution precisely where it matters—making it a versatile addition to your FPV toolkit.
Using Throttle Scale in Betaflight
The easiest way to reduce drone power and speed is through Betaflight’s throttle scale setting:
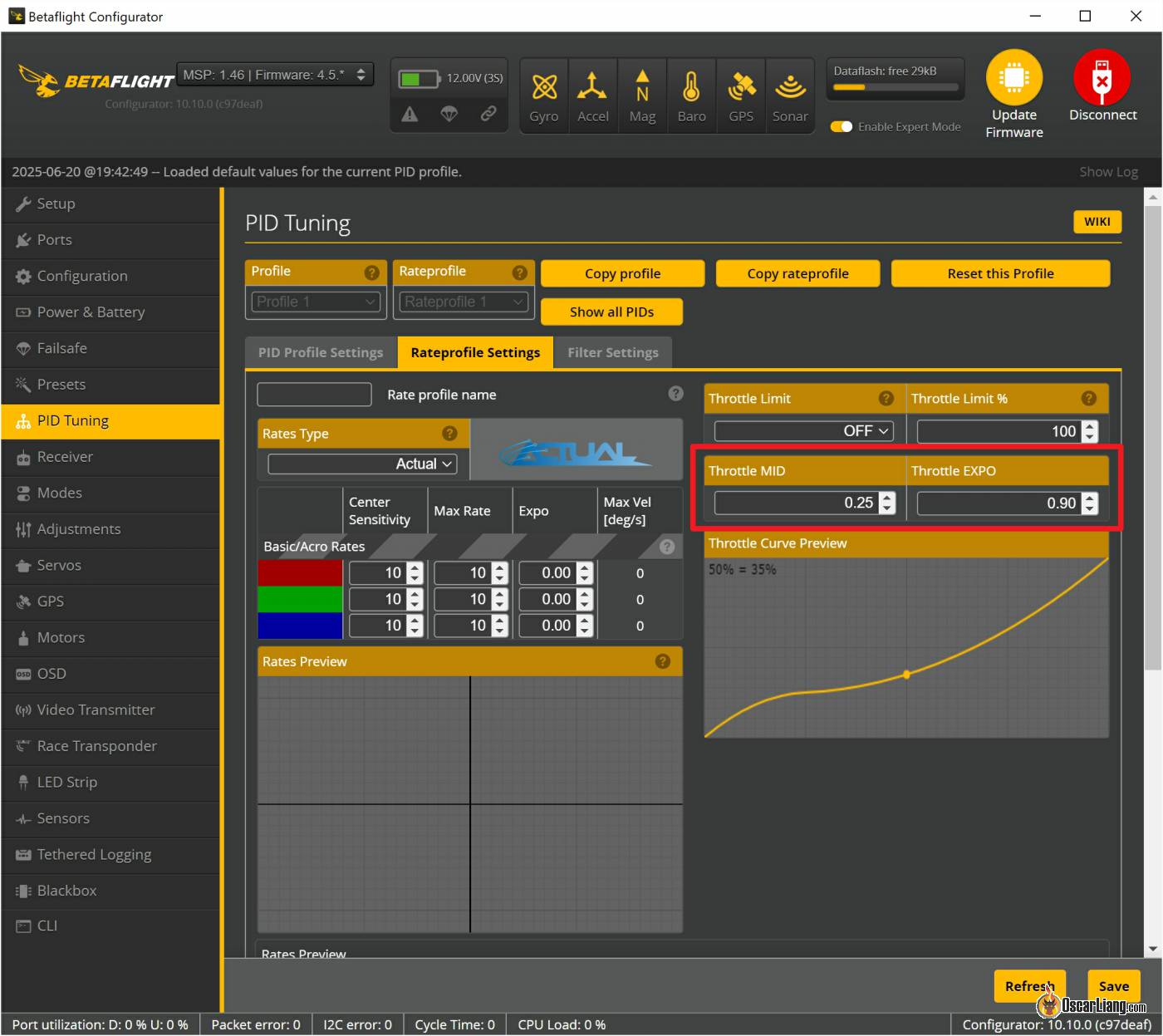
- Go to the “PID Tuning” tab.
- At the top, switch to the “Rateprofile Settings” section.
- Find “Throttle Limit” and “Throttle Limit %”.
- In the dropdown, choose “SCALE” – This is the setting you want. It scales your full throttle range down to a percentage.
- In Throttle Limit (%), set it to something less than 100%, like 80%. This means full throttle on your stick will now only command 80% motor output.
- Click “Save”.

Betaflight offers another option called “CLIP”. Rather than scaling the entire throttle range, CLIP cuts off throttle above certain percentage. For example, setting CLIP to 80% means your throttle stick works normally up to 80%, after which no additional throttle is provided. The benefit is the hover point remains the same as before, but the drawback is you lose throttle stick resolution, potentially resulting in less precise control. CLIP can be useful in certain applications, but for most FPV pilots, SCALE is typically the recommended option for reducing power of your drone.
Different Throttle Scales per Rate Profile
Betaflight supports up to 4 separate rate profiles, each with its own throttle scale settings. You can switch between these profiles via the Betaflight OSD menu or assign a switch on your radio (configured in Betaflight’s Adjustment tab).
Consider setting different throttle scales for various flying scenarios—indoor versus outdoor, freestyle versus racing, etc.
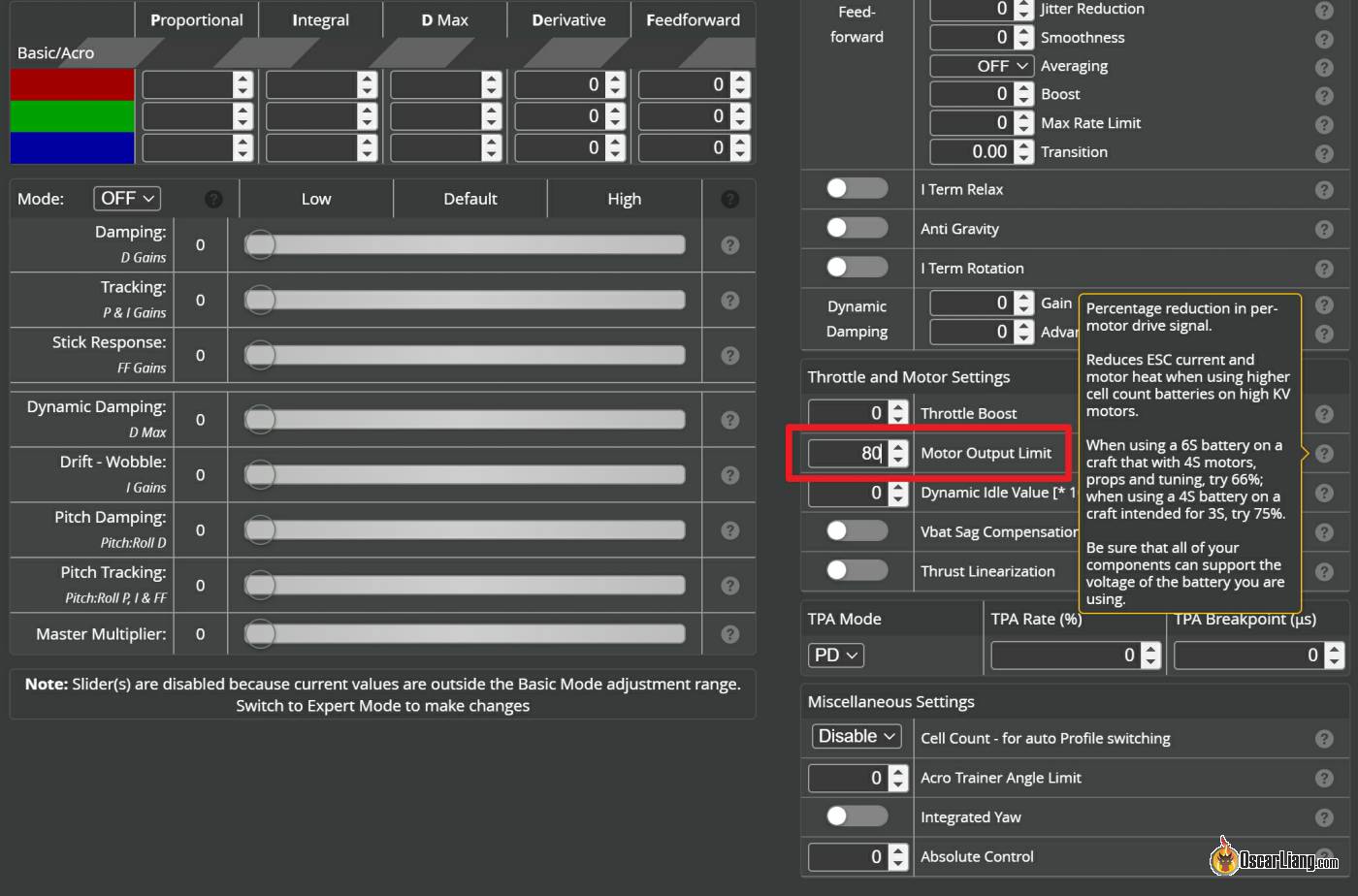
Motor Output Limit (Not Recommended)
You may notice another setting in Betaflight called Motor Output Limit under the PID Tuning tab.
I do not recommend using Motor Output Limit to simply slow your drone down. This setting is intended primarily for limiting motor KV to reduce ESC current or using higher-voltage batteries for high-KV motors.
Unnecessarily limiting Motor Output can make your drone sluggish because motors won’t achieve full speed when required, leading to decreased responsiveness or even instability. For general throttle management, Throttle Scale remains the superior and safer choice.
Throttle Expo in Betaflight
Apart from throttle scaling, another common method to manage throttle sensitivity is using Throttle Expo in Betaflight. Throttle Expo flattens a portion of the throttle curve around the hover/cruising point, providing finer control resolution in that area, while still preserving 100% throttle range.
Although this method can be beneficial in certain situations, I personally don’t recommend it for beginners. Throttle Expo can make throttle response less predictable, as the hover point may shift depending on battery voltage, propeller efficiency, and payload weight etc. Instead, I strongly recommend using Throttle Scale, as discussed earlier, for more predictable and consistent throttle response.
Throttle Scaling on EdgeTX Radios
If you’re unable or prefer not to use Betaflight for throttle scaling, you can do a similar thing in your EdgeTX radio. This method is straightforward and is especially handy if you fly multiple drones, as it can apply universally across models.
Go to Mixer on your radio. Find the Throttle channel, hold down the Enter button, and select Edit.

The default Weight value is 100 (representing 100% throttle). Reduce this to your desired throttle percentage (e.g., 80 for 80% throttle).
Throttle channel value starts from -100 to 100 (0% to 100%), so you have to adjust the Offset value to ensure the throttle range starts correctly at -100. For example, if you set Weight to 80 (20% less than default), your Offset should be set to -20.

That’s it! Your drone will now have a scaled throttle output.
You can even configure a knob or slider on your radio to dynamically adjust throttle scaling during flight. This can be particularly useful for pilots frequently flying both indoors and outdoors or racers who need varying throttle limits for different tracks.
Advanced Setup: Dynamic Throttle Scaling with Potentiometer
Want to dynamically change throttle scaling on-the-fly using a knob on your EdgeTX radio? Here are two powerful ways to accomplish this: Mixer Multiplex and Global Variables.
Method 1: Mixer Multiplex
In this example, I will use a knob (potentiometer) to vary throttle scaling from 50% to 100%.

In the Mixer menu, find the throttle channel.
Insert a new line below your existing throttle channel by holding down Enter and selecting Insert After.

Edit this line, choose a knob or slider as the source, I will use S2 in this example. Set Weight to 25, Offset to 75.

Scroll down in the same page and set Multiplex to “Multiply”.

Now add another line under the one we just created. Again, select the same knob/slider as the source (S2 in our example), and set Weight to 25 and Offset to -25.

But this time you want to select “Add” in the Multiplex setting.

And you should end up with this:

This should be working now!
Finally you can setup a switch to enable/disable this feature. Simply add a switch position in these two lines, so the max throttle remains at 100% and unaffected by the knob when the switch is not active. Do this for both *= and += lines.

To set different maximum throttle range, like 0% to 100% instead of 50% to 100%, you only need to play around with the Weight and Offset of the two lines under throttle. Here are two examples, 50% to 100% and 0% to 100%.
50% to 100% Max Throttle
- *= S2 Weight 25, Offset 75
- += S2 Weigh 25, Offset -25
0% to 100% Max Throttle
- *= S2 Weight 50, Offset 50
- += S2 Weight 50, Offset -50
Method 2: Global Variables
This approach is more complex but demonstrates the versatility and power of EdgeTX’s Global Variables (GV) feature. It achieves the same result as the Mixer Multiplex method but might inspire other creative setups.
Go to Inputs.

Create two new inputs. Use the same slider or knob of your choice as the Source. We will use S2 in our example.
We will use the values of these inputs as the Weight and Offset of the our throttle, therefore I name these inputs TWgt (Throttle Weight) and TOfs (Throttle Offset) respectively.
It might sound a bit confusing now, no worries, just keep following what I am doing here, it doesn’t matter what you call them as long as you know which is which.
And set the Weight and Offsets values according to the diagrams below. These values will allow the throttle cap to change from 50% to 100% as we turn the slider from 0% to 100%.


You should end up with 2 new inputs like this.

Now go to the Special Function page.

Create two “ON” functions to adjust GV1 and GV2 base on the inputs we previously created. What these basically do is to turn the slider value into “global variables” so we can access it in the program freely;
TWgt = GV1, and TOfs = GV2.
Don’t forget to enable these functions by checking the boxes at the right.

Here is the final step. Go to the Mixer page, and edit the Throttle channel.
Use GV1 as the Weight of the Throttle channel, and GV2 as the Offset. You can actually do this in the Inputs Page too, either way is fine.

That’s it! It should be working now.
If you wish, you can assign a switch to enable/disable this feature. Go to Special Functions.
Assign two functions to a spare switch you want to enable/disable this feature, and use “Adjust GV1 100”, and “Adjust GV2 0”. This is basically setting the throttle channel weight and offset in the mixer back to the default values.

To use different max throttle range, simply play around with Weight and Offsets in the two slider inputs. Here are some examples:
50% to 100% Max Throttle
- TWgt (Weight 25, Offset 75)
- TOfs (Weight 25, Offset -25)
0% to 100% Max Throttle
- TWgt (Weight 50, Offset 50)
- TOfs (Weight 50, Offset -50)
Final Throughs
Throttle scaling can significantly improve your control over FPV drones, benefiting beginners and experienced pilots alike. While scaling via Betaflight is straightforward, EdgeTX radios offer flexible, dynamic methods to suit different flying scenarios. Experiment with these settings to find your ideal balance of responsiveness and control, enhancing your FPV flying experience.
23 comments
Is good to use a mix? Throttle limit scale and 80%. Throttle mid 0.30 and 0.30 expo ??
Well.. it’s not wrong as long as you are happy and enjoy flying. Personally I prefer less input manipulations for a simple setup.
You find a way to use the knob….genius!!! thank you
Hi Oscar,
Can you please update this tutorial on the last version of edgetx? 2.9
There are a lot of difference since 2009.
Thanks you.
Hi Oscar,
What if i setup my throttle dual rates in the radio to 80 % instead ?
Also, want to ask a question if with 25,000 KV motors which 31 mm props will be suitable : 3 blade / 4 blade ?
Thanks for your great informative writeups as always !
Most brilliant article !
is it possible to do same for yaw/roll/pitch? I am trying different values, can not get it right :(
for yaw roll and pitch, you’d have to do it inside the radio settings, just set a maximum output value for these channels in the mixer’s page.
I have a DJI FPV Controller. Anyway to change Roll/Pitch in BetaFlight?
Wondering if you have a guide on setting the motor limit, or if you could point me to the correct betaflight setting. I recently bought a set of motors that are too high a kv and need to try and tame them.
Love your blog… its much easier to read your blog for 2min vrs watching a 20min youtube vid.
One thing to mention: if you set up throttle limit in the TX like this and set the throttle mid-point in betaflight, your throttle curve will be wrong because betaflight sets the curve based upon the value that is set in the flight controller (usually 100%). Either set both the throttle limit and mid-point in the TX, or set the throttle limit and Mid-point in betaflight.
The problem is this uses throttle limit rather than motor limit. When you wind up in a situation where the gyro demands full authority of the motors it will spin the motors at full throttle which could be bad, especially if you’re using this to tame 6S…
If you use the appropriate motor KV then it shouldn’t’ be a problem
Hi, i’ve just tried the option with mixer multiplex and as a result my taranis xq7 reduces row to 75 % not the throttle, ho to fix that ?
Regards,
Jan
Great article. I am in the process of putting together a quad where the ESCs are 25A, while the motors can draw close to 30A. I figure that scaling this in the FC to about 80% will contribute to keeping the ESC a bit safer from overheating.
Oscar,
Which method would limit the usable power by the controller? AFAIK using the scale in Betaflight still allows the FC to use full power when it needs (like during a flip recovery or whatnot}. I recently purchased some motors that turned out to be much higher Kv than I expected and I need to make sure that when I scale the throttle the FC will not attempt to use more than that even during such events in order to keep within ESC current specs.
Setting it on the FC would limit the max motor output. Setting it on the radio only limit the signal sent from the radio, the quad can still use 100% power.
Hi Oscar,
Thanks for sharing this, it is really helpful for new fliers like me, BUT i really couldn’t do it. In a (Using Slider/Knob to Change Maximum Throttle (Using Mixer Multiplex)), i tried to do it step by step, everything was very clear until you said :Now add another line under… i thougt about it few times until i got you and did it, then it went well until you said: This should be working now! BUT after that i was totally lost and still don’t know what and how you mean!!!!! Could you please add some more words, screen shots and tell us how to add switch and how to do the rest of the work please
yea that way is quite complicated. Just stick with “Using Mixer Multiplex” for now, the results are the same.
Thanks for the article very easy to follow & works like a charm.
I can confirm the mixer method works great. I’m going to experiment with different throttle limits to extend flight times and increase distance flown….
If you are using openTX, you can also limit the throttle simply using curves without sacrificing throttle stick resolution.
Same using the weight/offset method I shown in the post.
Like I said, there are a million ways to achieve the same thing :D