
Previously we reviewed and built a FPV Micro quad based on Beef flight controller and 8.5mm brushed motors, and today we are going to review the 3Dfly Micro Quad kit from Hovership that also comes with the same FC and motors.

Get your 3DFly Micro Quad Kit from Hovership. This review and build is done by Artur B.
Flight video of the micro quad:
3DFly Micro Quad Review
3DFly micro quad kit contains nearly all the parts necessary to build a micro quad. The only thing that you need is an airframe, which you can get the design from here and print it yourself. Hovership mentioned they might include pre-printed frame in the package in the future.
Oscar has done several tutorials explaining the process of building indoor FPV micro quads, and how to choose the right components. However it can be frustrating and time consuming to find the right parts.
Thanks to Hovership I had a chance to look closely at this Micro Quad bundle that was created to make it a lot easier to build, and avoid all the troubles of finding the right components myself.


What’s in the box?
- Beef’s Brushed Board
- 4 x 8.5mm brushed motors (8.5mm diameter – 2 clockwise, 2 counter-clockwise rotation)
- 2 sets of propellers (4 clockwise, 4 counter-clockwise rotation) – random colour
- CP2102 USB to serial programmer with with 4-pin jumper cable
- MicroFrX FrSky compatible receiver or LemonRX DSMX Spektrum compatible satellite receiver
- 2 x 1S 380mAh LiPo battery
- 6-port USB LiPo battery charger
- 8cm 3:1 clear heat shrink tubing with heat activated adhesive to hold motors in airframe sockets


What else are still needed?
- Radio transmitter
- 3D printed frame
- Double sided tape (to hold the flight controller to frame)
- Rubber band or velcro (to hold the battery to frame)
- FPV Setup
I had mine printed by my colleague. It took about 2.5hrs to do and I went with bright green colour, so the quad would be easier to find if I crash it.
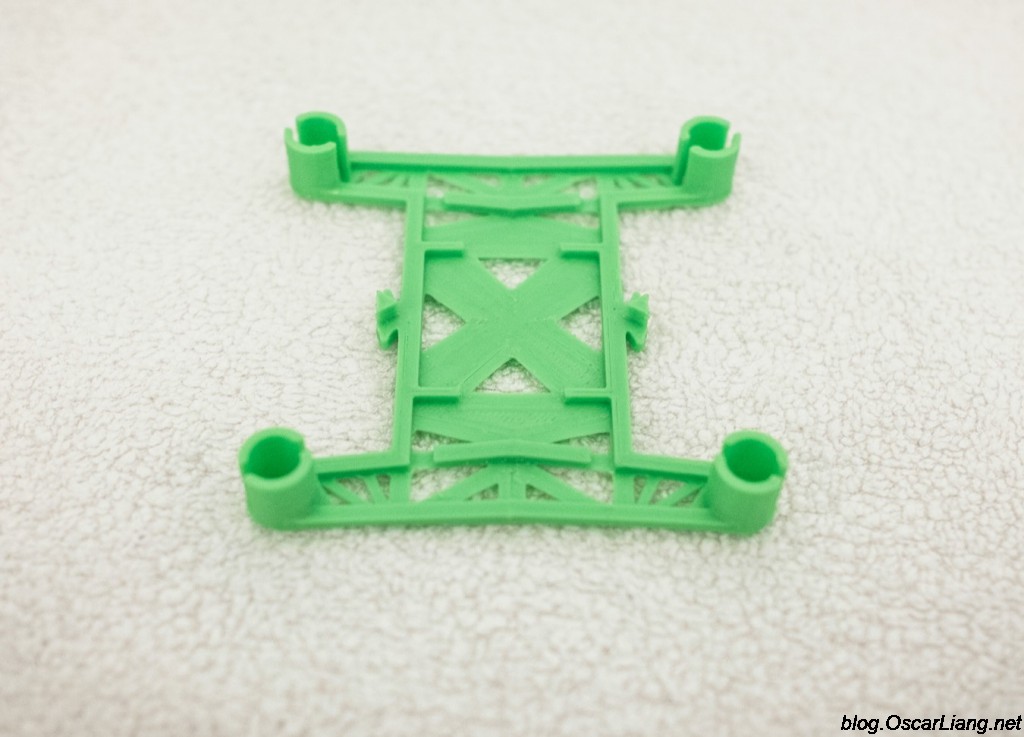
The frame is specially designed to fit the Beef FC and 8.5mm motors. Motor-to-motor distance is 105mm. In the frame centre there are clinches on each side where the rubber band should be attached to hold the battery.
Build in steps
There is a great detailed assembly guide on Hovership website. It clearly shows all the steps to build this micro quad, even beginners should have no problem.
1.) Started the build with installing motors onto the frame. CW motors have BLACK&WHITE cables, CCW motors have RED&BLACK cables. It is very important to get that part right. I didn’t use supplied heat shrink tube, but instead used zip ties to secure motors in the mounting holes.

2.) Next I prepared Beef FC and MicroFrX. Soldered power cable to FC. I did solder motor connectors reversed to the board by mistake. To correct it, I had to reverse cables in the tiny JST plug from each motor. It all worked in the end but of course I learned the hard way.
Soldered cables directly to the radio receiver and then to the board. Pads on the RX and the board are in the same order.



3.) Using supplied CP2102 USB to serial programmer I have connected the board to the computer and flashed it with Cleanflight. To do so I flashed it with Baseflight first and then with Cleanflight – easiest way of putting our favourite multi rotor firmware.

4.) With all cables connected, I used hot glue to keep cables organised on the tiny frame. Also hot glued the FC to the frame but will replace it with the 3M double sided foam tape for more security.
Installed the rubber band and the battery.



5.) I wanted this micro quad to be able to fly with FPV gear on. I used AltitudeRC 25mW Video Transmiter with Mini Wide Angle FPV Camera. FPV gear was connected to the board with just the power cable and hot glued to the frame.




To keep COG (Centre of gravity) of the frame under the FC with the FPV gear on, battery needed to be moved underneath but towards back of the frame. Otherwise weight distribution wouldn’t be even across the frame.
Finished build weights 45g without the battery and 58g with the battery. 10g less without FPV gear on.
Cleanflight configuration
I used PIDC 1 for this quad. Configured switches to arm the board and change flight mode between Rate/Angle/Horizon. Since this little flier will be used mostly indoors I decided to use self levelling to help flying in a very tight spaces. Didn’t want to rely on acro stick moves to level the quad.
One important note: default mid stick point is around 1540 with the MicroFrX, so trim on the radio while connected to CF is required to make it work correctly.
My CleanFlight tabs:



Costs
Quite important for potential buyers – how is the price of the whole kit comparing to buying everything bit by bit.
I did a bit of a math. Rough prices based on online retailers:
- Beef CF – $69
- Micro FrX – $15
- Motors – $15
- Charger – $6
- Props – $3
- USB Programmer – $4
- Batteries – $5
TOTAL:$117 (estimate)
Hovership sells 3Dfly for $108 which corresponds to the sum of all components amazingly!
Final thoughts
I had an opportunity to compare this build against CJMCU micro quad built by Oscar. Thanks to bigger motors and frame it is much more powerful. It flies even better without FPV gear.

Positive things about 3DFly:
- Nearly everything needed to build is in one box from one retailer
- Superb assembly guide
- Flight controller runs on Cleanflight!
- Attractive price + one postage vs. multiple postage from multiple retailers
- If frame breaks, you can simply print another one
Negative things about 3DFly:
- 3D frame needs printing, so it adds to the price if someone doesn’t have their own 3D printer
I really like this idea of a kit with everything to build a micro quad. Perfect project for coming winter. Definitely saves a lot of hassle with researching for components, prices & retailers.
23 comments
Working on this drone with students. Can someone pass along a link to Baseflight or Cleanflight settings and any coding that has to be done in the CLI to get this drone linked to the controller and up in the air?
MicroFrX FrSky compatible receiver is what I need…….what is the cheapest available? Thanks
Hi Oscar, your posts are very helpful for newbies like me. I’ve built this kit but I’ve run in to an issue I can’t figure out. As soon as I plug the battery all motors spin to what I think is full throttle. When I’m in cleanflight (which I flashed and then moved to betaflight with no effect) and I check the receive tab all the controls respond properly. In the motors tab even sliding the throttle there down to zero has no effect. Only slows them down a bit.
Any insight you can offer would be appreciated!
Thanks!
Hi Oscar, Turns out I’m stupid and should have read the comments. Set motor_pwm_rate to 32000 fixed it. You can delete this thread if you feel like saving me the embarrassment… :)
have you set this in CLI?
feature MOTOR_STOP
set min_throttle = 1000
set motor_pwm_rate = 32000
Hi Oscar,
I just finished this build, very cool. I flashed baseflight but when I plug in the power all the motors go on. Any idea why?
I am also looking for directions to bind the spektrum, I know you don’t use the Spektrum, but with all the motors going on right away, it’s a but challenging to bind.
Any help is appreciated.
have you set the following?
feature MOTOR_STOP
set motor_pwm_rate = 32000
sorry i don’t use Spektrum so can’t be much help on that.
Hi Oscar
i love this amazing micro quad. I have one stupid question: is there any way how to make this micro quad compatible with FrSky Taranis? I dont wanna buy another module for Taranis…
Thanks :)
yes, get a frsky micro PPM RX :)
hello Oscar… I built a microquad similar to kit 3DFLY. But the engines 8,5mm are burning hot after the flight and the quad does not have power. I use propellers of HUBSAN X4.
I followed well the instruction of the assembly and the parameters of the FC.
thanks for being able to help me.
because the quad is really very slow and misses power.
thank you
check your lipo connector / motor soldering, check motors temperature after flight, see if one is hotter than other? maybe a faulty motor? also try Parrot props…
HELLO OSCAR . I followed your build with the pieces that you recommend , but my problem my quad flight evil and has no power. The engines are very hot , I use hubsanX4 propellers. Have you trouble . THANK YOU
FC beef brushed
8,5mm engine
HUBSAN X4 propellers
1s Battery 380mAh 35C
Frame 3D printed
total weight? where did you get battery from?
The total weight is 56gr with battery. The battery is well to charge. Battery multirotorsuperstore 1S 380mah 35C.
The motor are very hot after the flights.
Hi Oscar,
What kind of flight times are you getting on the stock battery with and without FPV gear?
Hi Oscar
“Started the build with installing motors onto the frame. CW motors have BLACK&WHITE cables, CCW motors have RED&BLACK cables”
This is confusing seems to be the opposite on the multirotor superstore motors?
Hi Oscar
i really love ur blog, it was so perfect to learn how to build my own drone, i totally understand ur instruction, just i want to know about the RF controller what type of controller do u use? can i use any type of specktrum controller?
and how about the flight time about 3dfly?
You can use spektrum as long as it binds with satellite rx – personally I have no idea about spektrum transmitter so can’t comment further on that. Flight time depends on the battery but max 6minutes and it depends on how hard you push it.
Hi Oscar!
After completing the buld of 250 quad I’m doing now (actually, waiting for parts) I’m planning to build something small to fly indoors.
I recently encountered this frame: ru.aliexpress.com/item/the-newest-MINI-FPV-drone-cross-racing-quadcopter-pure-carbon-fiber-frame-ML130-ML180-ML210-unassembled/32519311554.html which looks pefrect for this purposes – smallest frame is 130 and the build will be with brushless motors.
What do you think about 130 size frame? Do micro quads have advantages over something can be built on it?
brushless are too powerful for living room flying :) brushless is a bit more harmless :D
Ho Oscar!
Thanks for your reply. The reason I’m thinking about building something on small 130 frame is reliability of motors. I’m flying my micro (nano rx4) ~5 of 7 days a week for 10-20 minutes. This eats resource of brushed motors rapidly. For example, I changed whole set of motors 25 days ago and one of new motors looks like it almost dead (it does not spin freely when I blow on the propeller and quad significanltly changes angle when throttle changes). I expect that something on brushless motors will fly much longer.
How big a resource of brushless motors?
hi Oscar
take a look at this ! 120mm and 150 grammes with a 500 mah lipo
aero-tek.eu/shop/fr/packs-et-kits/215-p-tiot-complet-a-monter.html
Hi Oscar,
I did a remixed version of the frame which does not bend and includes an mount for the famous nano camera.
Link: thingiverse.com/thing:1127067