
After building a mini quadcopter and mini hexacopter, I have some spare parts just enough to build a micro tricopter. In this project I designed my own frame including the yaw mechanism, and I will be using the KK2.0 as the flight controller. I will list all the parts later in this post. I have never built or flied a tricopter before, so making this mini tricopter is certainly a big challenge for me.

Tricopter is a very good FPV options: no prop showing in camera view, foldable frame, fewer point of failure and lower costs of components. I can use this mini multicopter to learn how to fly first before building a bigger one.
Parts I am using for the Mini Tricopter
The cost of this mini tricopter is just under $80. Here are the components that I used.
- KK2.0 (buy from here, KK2.1 has been released, buy from here)
- Hobbyking 6A ESC
- Turnigy 1811-2900KV brushless motors (buy from here)
- Turnigy 9g Analog Servo
- 5030 3 blades propellers (clockwise and counter-clockwise)
I was thinking getting a small digital metal gear servo to ensure the best yaw performance (that seems to be the choice by most people). I needed it fairy quickly but I couldn’t find any sellers online. Although I was very reluctant, I used the 9g plastic gear servo just to avoid the days of waiting for delivery. But it seems working at the end, though the tricopter is a little shaky possibly because of the cheap servo.
I was originally using the 1811-2000KV motors (silver ones), but they are so fragile! The wires under the bell can be pulled apart very easily if you are not careful. I will not recommend them at all. At the same price tag you can find the Turnigy 1811 motors (red), which are better quality, more powerful and durable.

Building Frame and the Yaw Mechanism
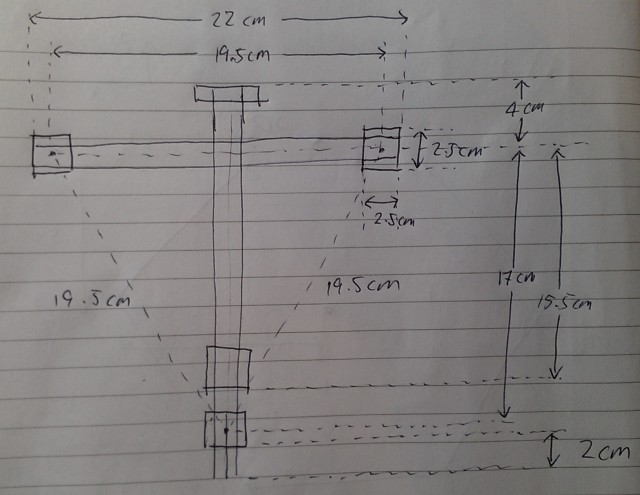
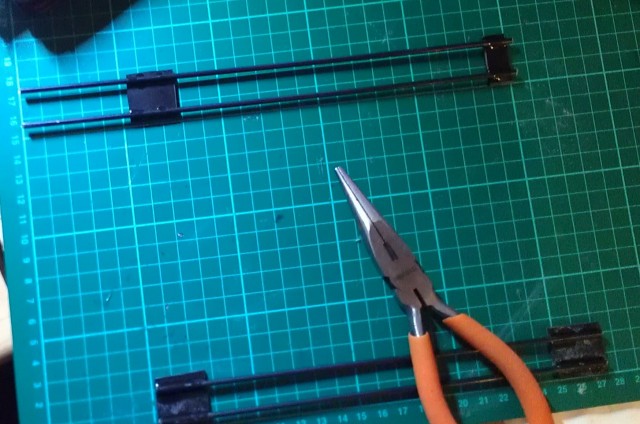
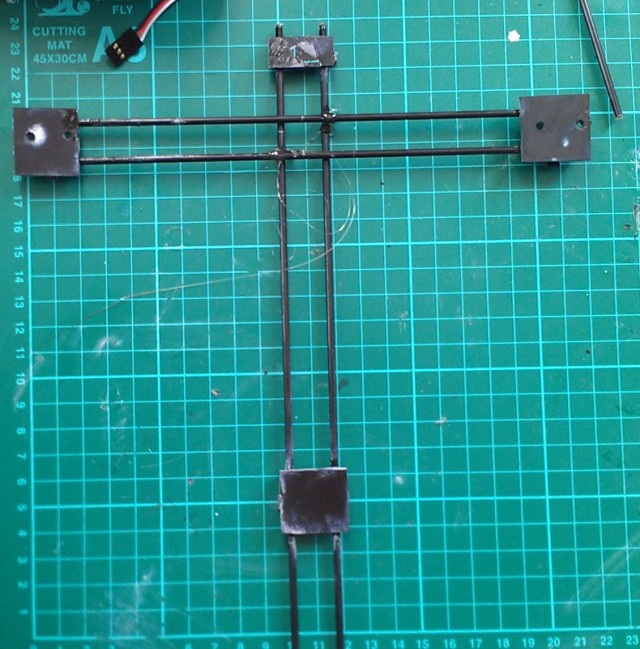
Same as my mini quadcopter, I will be using Styrene Sheet and 4mm fiberglass rods to build the frame. I think the T shape frame is easier to build than the Y shape, I could just apply the same technique I used in the mini quadcopter frame, use wires to tie two pieces of arms together to form a T shape (actually more of a cross shape). Check the diagram below for dimension.
As for the Yaw mechanism, I went through so many different designs I found on the web.



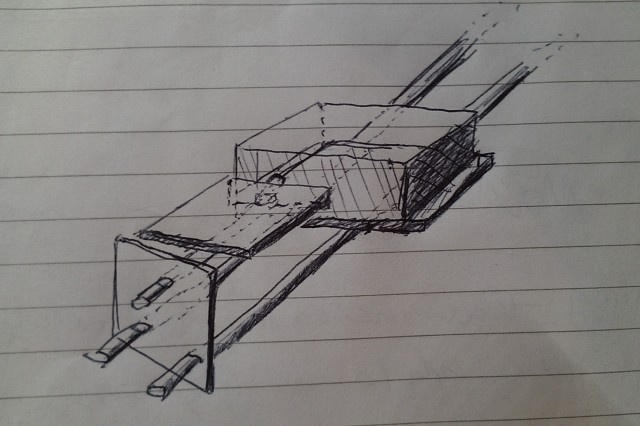
I realized none of them are easy for me to make, so I design my own based on the material I have got. Here is the simple diagram I drew before I built the thing. It’s good to get your idea on paper or some.
I use super glue to stick everything together first. It takes a very long time to dry (a couple of hours) then I apply hot glue to enhance the joints and fill up all the gaps. If only using hot glue, the joints can be moved slightly if you apply force on it, and that’s not good if you have vibrations.

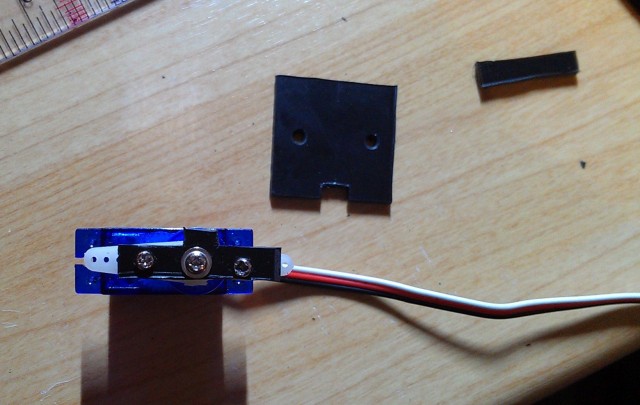
I also glued a very thin piece to hold the rod to the yaw motor mount, just make sure it’s securely holding them together.


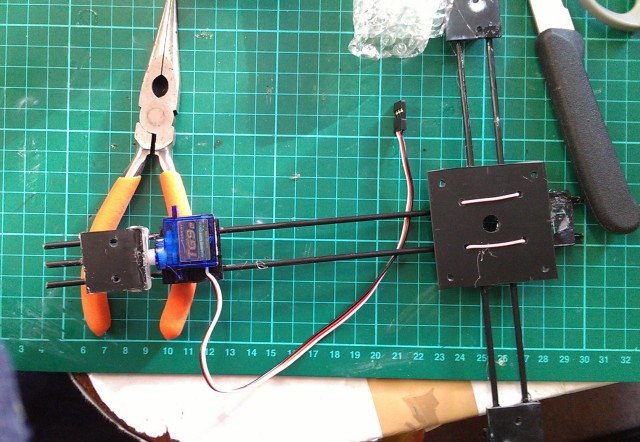
I then put a thick piece of styrene sheet at the end of the frame to hold all the rods in place. Note that the bottom two rods are glued to the piece, and the top rod can freely rotate by the servo.


For performance and how it works in practice, check out the video in this post.
The whole frame weights about 40 grams (excluding the servo, 10 grams). I reckon the hot glue must weight about 10 grams :-)

Assembling The Mini Tricopter
Because the tricopter has limited lifting capacity, I tried to minimize the material used, such as keeping wires as short as possible. I am not using a power distribution cable or board, just tie and solder the cable together.

Flying!
It wasn’t easy to get it up in the air. I spent a lot of time troubleshooting the problems. It took me sometime as well to figure out better PID values for it, which I will still need to work on.
The tricopter flying experience is very different from the quadcopter and hexacopter. It’s very stable already in Acro mode (gyro sensor only), very controllable yaw movement. You can control it just like a ordinary air plane, so I think it will be very good for FPV purposes.
But it does take time to get used to the new configuration. For my mini tricopter, I still need to work on the PID gains, and possibly replace the 9g servo with a digital metal gear servo for better and more stable yaw control. At the moment it’s shaking a bit and not very stable when turning around yaw axis.
The KK2.0 flight controller board I have got is from Hobbyking, and firmware is still on 1.2. Maybe the old firmware contributes to the instability, I am not sure yet.
Crazy Spinning at Take off in Maiden flight
One of the biggest problems I had before it can fly.
At first I was using two 1811-2000KV motors at the front, and one 1811-2900KV motor at the back. I was assuming the back motor needs to carry the extra weight of a servo, so a slightly more powerful motor might be able to compensate it and the flight controller might be smart enough to adjust the thrust to maintain balance. Unfortunately, it wouldn’t take off at all, and it just spins like crazy on the ground.
I thought it was the difference in motor rotation speed that caused it, and I swapped the 2000KV with 2900KV motors and the same was happening. So I would not know whether you can put motors with different KV on the same multicopter.

After a long long trial on different PID settings, I was frustrated with an empty stomach. I took a break and start doing research online, found there are people had the same problem with tricopter spinning at take off using KK2.0.
The solution is simple. Go to the “Mixer Editor” and change the channel (number to the upper right) to 4 where the yaw servo is connected. Then change the “rudder” mix value to -100. Apparently, Different servos require different settings. Some are +100 some are -100 etc. Also make sure it’s set to Low for analog servo and high for digital servo. Servo filtering is also advised to set to 70%.
All Tuned! Let’s fly!
The KK2.0 I bought directly from Hobbyking was on firmware 1.2, so it wasn’t flying very well. I upgraded it to 1.6 using the Arduino Uno, and it really made a huge difference to the performance.
After a long battle with PID tuning last night, and some minor midifications on the aircraft, I managed to fly this mini tricopter super stable. I am really impressed by its performance, it feels even better than the quadcopter, very smooth and controllable.
Check out the video you will see what I mean. Given it’s size and cheap cost, this is not bad, not bad at all.
https://www.youtube.com/watch?v=s8tfGdwtrtQ
24 comments
dear sir i wnt know how tricopter goin to fowerd (mechanism ,physically
Hi Oscar! Like others have said, I keep finding myself here! Seems to be where much of the answers are! Also interested in the artist/name of the music in the last vid(test flying indoors).
Tell me!!!
Rescue- The Singhs
;-)
Which transmitter and receiver u had used in this project and how many channels please let me know
Turnigy 9X 8 channels.
Hi Oscar,
Beautifull build !
But please, what is the name of the song for your last video ?
Thanks :)
I was curious about that song too, can’t seem to find it anywhere else.
it’s called
Rescue – The Singhs
just found it :)
Hi Oscar, I love your website. I swear every time I start researching something off the beaten path I end up finding answers on your website.
But like Luna asked before: could you please share the settings that you ended up using?
where did you get the remote control for the tricopter…is it possible to fly it without one?
you can find out more about the remote control by searching “Ground Station 9X” on my blog.
not you cannot fly without one.
is there another way of flying the thing without a remote control because where I live I cannot access that remote….
pliz help me I am really stuck and the science exhibition is on Thursday next week….The teachers are already thinking that I wasted the school money..
Does the three motors height from frame should be equal or they vary with that of the yaw motor
ideally they should, but difference within reasonable range should be fine.
Hi, nice project. I was wondering what type of RC controller you used.
RC controller? you mean flight controller? i was using the KK2.
Hi, I am trying to build this for a robot project at my school. Can you post a more detailed description of how to attach the wires to the Aruino?
Hi Oscar,
thanks for sharing your project.
could you please explain, in your opinion, what is the best option for tricopter motors, a low KV or a high KV (I’ve seen builder using 950 KV engines and others like you, use 2200 and higher KV).
For a newbie what is the best option?
Thanks again
Tricopters are just like quadcopters, it really depends on what you want to use it for, and what size you are after..
if you want to carry heavier payload, and longer flight time, go bigger motors with lower KV… if you want a racing tricopter, you want slightly higher KV motors…
Mind to share your full KK2 settings..?
Thanks..
What capacity and C rating is the battery are you using with this copter?
950mah 25-50C 2S battery
Why is the video private?!
oops… turned it off by accident! i have made it available now.. thanks for reminding!