The Piko BLX flight controller is basically a F3 flight controller that is integrated in a PDB, yet it’s tiny and light weight. The FC is developed by FuriousFPV.

Thanks to HeliDirect for sending us the Piko BLX FC for testing.
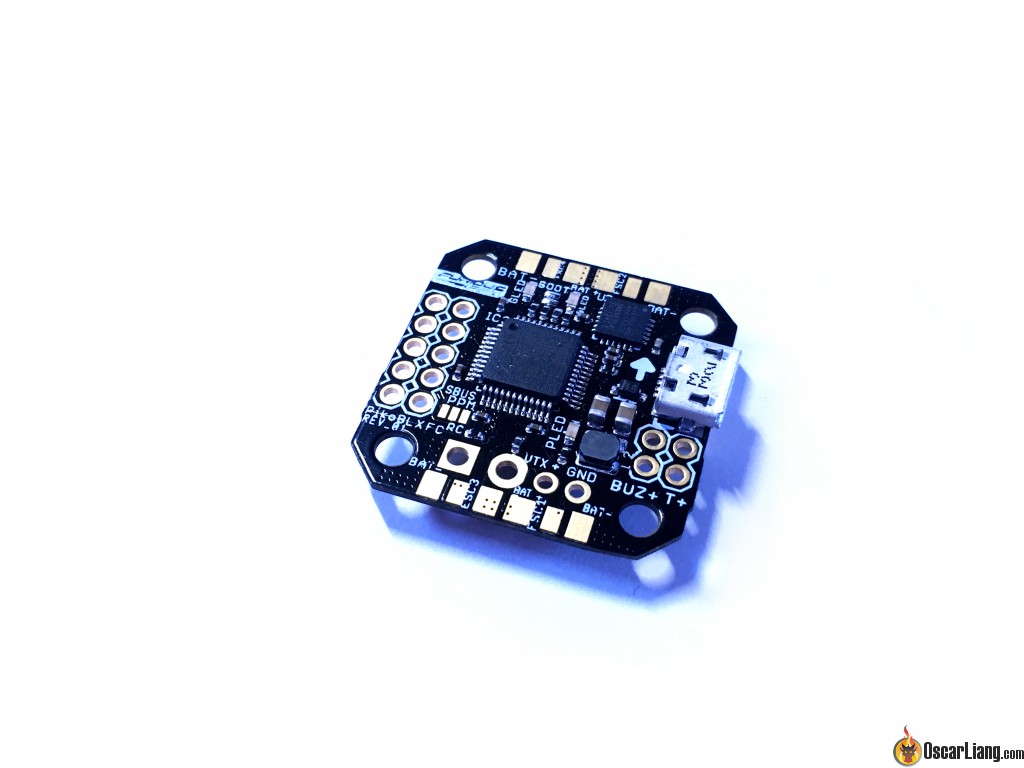
Piko BLX Small form factor
First thing I noticed was the small form factor of only 27x27mm, takes up less than half the area than a Naze32 board (36x36mm). It’s probably one of the smallest F3 flight controller to date. It weights only 2.5g! Mounting holes are 20x20mm.


It’s packed with components, yet you get access to many important pins we normally need on a F3 FC board, with header pin holes (not flaky JST connectors thank god!).
The form factor is so small, it won’t fit on most current frames directly with screws. There are many options to fit this FC in a frame, you could use double sided tape perhaps, or 3D print a 20 to 30.5mm adapter (many printing files on thingiverse). Or you could use the PDB we introduce later in this review.
See this size comparison between a KK2 board (50x50mm), the Piko, and the Naze32.

Features of the Piko FC
The Piko BLX is packed with great features, such as support for transponder, use of high performance MCU6000 with SPI Bus, 5V 2A BEC.
By connecting *EVERYTHING* to the FC, including your ESC, VTX, OSD, wiring is going to be so much cleaner and makes building easier.

The FC can be powered directly by 2S up to 6S Lipo battery. However because the FC is only rated for 50A of continuous current, I think it’s probably best for 3″ micro brushless tight builds. (6S?! I doubt anyone would be running 6S on a micro quad lol).
However if you want to run the Piko on a more powerful racing quad, like a 5″ with quad-blades props :) then you can consider pairing the Piko with this power distribution board. It weights 3.8g.

This optional separate PDB is designed to go with the Piko, and it’s rated for 150A. But I feel like using a separate PDB defeats the purpose of being tiny, and the integrated PDB functionality.


There is a power pins for VTX that actually connects to Battery+ with filtered voltage.
There is no current sensor on the board. But I think that would mostly concern those who run OSD (maybe you use that for telemetry).
BLHeli ESC Pass through works fine on this board also.
The PIKO flight controller is also compatible with OSD+GPS+LED+Sonar+Battery Monitoring devices – all can be used at the same time.
Firmware
The Piko BLX is currently in pre-release and will be added to Betaflight, Raceflight and Cleanflight as a target soon. For now I think there is an edited betaflight hex you can download directly from FuriousFPV product page.

Conclusion
Good things
- F3 processor with MPU6000 SPI (supports 8K/8K and low gyro noise)
- Built-in PDB / BEC makes wiring cleaner, building easier
- Super tiny and light weight, 27x27mm, 2.5g
- Because it can be powered directly from LiPo, it eliminates the need for VBAT pin
- Single RX input for SBUS and PPM, signal type is selected by bridging the right pads, less confusion
- If you are a Spektrum satellite user, you will be happy to see there is a dedicated port for it
- Built-in LC filter for the 5V and VTX power out
Things to be aware of
- Only 50A rated current, mostly useful for 3″ mini quad, could be risky running larger motors/props without using separate PDB
- Most frames don’t yet support 27mm form factor, additional adapter/PDB might be required (or drill extra holes on your frame)
- Only 5V voltage regulators, no 12V output, thus you are limited to what VTX and FPV Camera you can use (that either supports 5V or battery voltage)
- It doesn’t have ESC signal ground (if you prefer to use signal ground you could solder it to the power ground), see this discussion why you should run a ESC signal ground
- I wish they replace the boot pins with a button
- High current running on the same board as the gyro and other chips, not sure if that would cause any noise problems, we will find out in our flight testing
- The spec says it has built-in Buzzer, the fact is it doesn’t – I guess they mean the buzzer port
- One weird problem I have been having with the unit I am testing – in Cleanflight GUI, every time I go to another tab, it freezes and I have to re-connect (stuck and says rebooting fail)
Plan of testing this board
I have already had some experience with this board on a Torretto 130 RTF Micro Quad. But I am planning to build a new micro quad with this board the next few days, see how easy and clean the build would be.
Stay tuned :)
Lastly as we speak, FuriousFPV is developing 2-in-1 ESC that is the same size of the Piko, which can stack under the FC. It’s an interesting and convenient idea :) (following images are from FuriousFPV Facebook page)


23 comments
hello Oscar , my piko wont connect with the micro furious receiver,
I did all the thing you mentionned …but still wont be connected with the piko.
Caan you help me out please, I use a tanaris X9D SE and the furious fpv is connected with my tanaris and telemetry work but aint recognized by the pikoblx.
Best to contact Furious’s support bud, I haven’t used this FC for a very long time.
If haven’t a ESC signal ground, the black cable of the esc, on diagram, were are hooked up?
Jezzz… I’ve got this board coming as part of the 130mm ARF Flying Egg from King Kong . Sounds like a nightmare. If you guys had this coming in the mail, would you get another small electronics setup and replace it? It sounds as though there are some real issues to still get worked out here. The quad I’m waiting for is already built, just needs my Futaba 3001SB receiver, so maybe it won’t be so difficult to work with? But I don’t have a problem pulling the electronics for a better setup now, then re-use the Piko once it’s all worked out via FW update or whatever. Some issues obviously are going to be caveats that I’ll have to remember should I pull it, and build a custom micro down the road. What do you think, those of you who’ve worked extensively with this board?
Hi Oscar. I have this board and I’m trying to get it to bind to an FS-A8 (flysky/turnigy Evo) receiver. The receiver binds, but the board won’t connect. I’ve wired everything like you show, and soldered the sbus pads for uart3. I’ve set Betaflight and my Turnigy to Sbus, but no receiver signal. Any help would be appreciated.
can you try “set sbus inversion = off” and on in CLI? see which one works?
Hello Oscar –
Do you have time to answer a total newb question about the Piko BLX? I am using a Spektrum satellite with it and I am not sure what to do with the SBUS/CPPM jumpers. Do I bridge all three or just the right two for the CPPM setting?
Hope to hear back from you –
Scott :-)
Minim OSD & Piko BLX – recommendations / questions:
Do not power the MINIM OSD as shown on the wiring photo, this will “kill” your video picture by noise!
Instead source power / GND from the (5V?) “To VTX wit LC filter” ! (…as you source the cam and Vtx off).
Got the minim OSD working under betaflight on Piko BLX but it seems to have wrong FW on it (screen showing “waiting for hartbeat…”). What FW on the minim OSD would work proper with betaflight?
ATTENTION!:
– “To VTX wit LC filter” is providing voltage from battery – not 5.0 volts as many VTX run on!
– As well in my case the 5.0 voltage outputs are delivering measured 5.8 – 5.9 volts ! Example if LED WS2812 attached it will potentially fry ….I am not happy with that board…
Hi Georg / Oscar,
The “VTX with LC filter” does see, to supply lipo voltage, so in order not to fry my VTX I have connected it to the 5V /Grd instead. So now both my 5V/Grd on the Piko BLX are in use (one for the receiver and the other for VTX). Can I power the MinimOSD with the same 5V/Grd pads, or can I use the other unused ESC +ve/-ve instead as they seem to also supply 5V? Thanks!
Hi Oscar, ya sayin “There is no current sensor on the board” – actually there is one, as you can adjust the beeper via cleanflight, isn`t it?
BTW what exact firmwares in Cleanflight may be used – since it is an F3 board, what exactly does suit?
There wasn’t one on the one I reviewed, maybe they added on now? I am not sure I googled it and couldn’t find any info on that.
I don’t think it supports Cleanflight, only Betaflight. There is no CF target for Pico BLX.
Cleanflight ( and other) target:
Raceflight: github.com/NightHawk32/raceflight/tree/PikoBLX_target
Cleanflight: github.com/NightHawk32/cleanflight/tree/PikoBLX_target_cf
Betaflight: github.com/NightHawk32/cleanflight/tree/PikoBLX_target_bf
Hi Oscar,
I wanted to let you know your graphic for the PikoBLX is incorrectly mapped out. The legend in the upper left is correct but the labeled lines pointing to the board are all swapped. You might want to update it before it spreads farther and wider than it already has! Check furious fpv’s Pikoblx page for the correct graphic!
Thanks man! Keep doing awesome stuff!
The image was correct when I get the reviewed sample… but FuriousFPV keeps changing their stuff, it’s impossible to keep up with them :D
Im having some trouble flashing it onto betaflight could you help me or give some suggestions on how to fix the problem?
I’ve been trying to work out the bugs on my RotorX Raiju 155 hex using the Piko BLX, I’m running RotorX RX1306-4100kv motors and RotorX 20a escs on 3S lipo, haven’t installed FPV yet . I literally got 2-3 decent test flights then motor 1 stopped working properly. It started to studder/jitter then stopped completely. I reflowed my soldering and no bridging. I naturally suspected an esc problem first so I replaced the esc and still had the issue. I discovered that the motor was bad because I tried it on a different motor position of FC and it still didn’t work. Put new motor on and same issue, the new motor is studdering too! I don’t think it’s a coincidence that I’m still having an issue. I think the issue lies in the Piko.
We replied on your question on the forum :)
Purchased one of these for my Doinker. Came with Betaflight pre-installed but I had USB connection issues so I installed Cleanflight and that solved the USB connection issues.
Tried to enable telemetry but it didn’t work, I tried setting telemetry_inversion on as the manual stated and it still didn’t work. The manual said to select Smartport but that didn’t work, I see now they finally updated the online manual and FrSky should be selected instead of Smartport, so now telemetry does work.
Depending on how I hold my Doinker, with the battery plugged in, on my Taranis keeps repeating “Telemetry Lost, Telemetry Found, Telemetry Lost, Telemetry Found”. If I put the quad on the ground it stops so there is some type of ground / power loss happening on the board. When I do a hard bank left or right I get some type of de-syncing issue and I lose control of the quad for a second or two, same happens with a hard punch out.
Finally, this week, the buzzer I installed on it isn’t loud as it once was, it’s only a tiny little buzz that you can hardly hear. Took the buzzer off and tested it with 5 volts and it works fine so, again, something is wrong with the FC.
This product, for me, has been nothing but trouble. If you look at the RC Groups forum there are many other quality issues others are having with this board as well.
“Telemetry Lost, Telemetry Found, Telemetry Lost, Telemetry Found”.
I have this issue. Was filming a YouTube Flight Review, on my Q-Carbon 85, and my maiden flight, albeit awesome, lasted around 5 seconds. Failsafe kicked in, as my Taranis started yelling out ”Telelmetry Lost”. It didnt get more than around 30 metres from where it took off. 2nd and third flights, same.
Took it home. Left the quad on my front door step, and walked the Transmitter up the street. Got around 15 to 20 metres away, and same announcement.
I decided to swap out the FuriousFPV Micro Receiver, with a FuriousFPV Mini Receiver.
Walked the Transmitter up the street. Same again to my dismay.
So I disconnected the Eachine TX02 AIO Camera, just wondering whether or not, either some kind of re-transmission might have been occuring across frequency bands. However, that result ended up with the same loss of telemetry as well.
When watching the Taranis RSSI screen, the level is circa 120db, right next to the quad. Moving through my house, around 10 – 15 odd metres, this drops to 68db.
On looking at the Receiver page in Betaflight, an odd thing is occuring.
Auxilary channel 5 (which I have not programmed into my taranis) is bouncing, from around 1900 – 2000 every 50 ms.
In CLI i set the maximum auxilary channels to 3, and Aux 5 is still jumping all over the place.
I am at an utter loss as to how to solve this, save for scrapping the darn FC and rebuilding this BNF myself. I really do not want, to give QuattroVolante a bad rap, when I know this little quad is awesome.
So I set this FC up with BlHeli S 20A ESCs, DYS 1306/4000kV and 3s. It connects to Cleanflight and allows most config changes, but bails out with all reboot operations (Cleanflight “unrecoverable failure of serial connection, disconnecting….”). The changes persist, but it kicks out and requires a reconnect. Motors are OK, ESCs flashed with passthrough using BlHeli Suite. The problem is that I cannot get the receiver to function (FrSky XSR, PPM). Cleanflight locks up with no display on the receiver tab. The hardware is bound, wired correctly and solder bridged on the board. It seems so close!
I’ll approach FuriousFPV (my source) for thoughts as well. Thanks for all your contributions
I’ve experienced this exact problem even with more established electronics, like the TBS Powercube (the Colibri FC to be exact), and reflashing it (full chip erase) always cleared that up. I think this happens if you go from BF to CF, or back again, on the same firmware. The Powercube can use either, esp when the FC is on TBS firmware exclusively from the TBS Agent, but twice in the past I’ve had to reflash to solve the crashing issues. Different hardware obviously, but the issue was exactly the same, and it drove me nuts for a bit until I figured it out.
The esc’s can be hooked up directly to the battery if you are worried about pulling too many amps.
You already know this but im just saying an extra pdb is not really needed since everying else can still be connected to the fc.