
It’s important to setup failsafe properly on your mini quad for maximum safety and preventing fly-away. In this tutorial I will explain what failsafe is, and how to set it up in Betaflight as well as on your Taranis TX radio transmitter and receiver.


Warning: DON’T FLY WITHOUT VERIFYING THAT FAILSAFE WORKS CORRECTLY.
Table of Contents
What’s a Failsafe?
A failsafe is what the RC model does when connection or signal is lost between the radio transmitter and receiver. The common causes of a failsafe are:
- radio signal is out of range when you fly too far away
- signal is blocked by obstacles
- TX or RX is switched off, lost power or malfunctioning
- receiver is accidentally disconnected from the flight controller
You can program failsafe to do whatever you want when you lose radio signal. The goal is for safety and minimizing damage to the surrounding, and even saving your model when you lose signal.
Common failsafe actions are holding the last stick position, or keep throttle low for slow descent. But it’s generally advised to cut throttle as soon as failsafe happens. This should disable or stop all the motors, and your quad should just drop vertically to the ground.
A racing drone with uncontrolled spinning propellers can be extremely dangerous. Therefore it’s better to crash your quadcopter and repair it later, rather than hurting someone badly.
Another possibility without setting up failsafe properly, is that your aircraft might just continue flying when signal is lost, until it disappeared off the horizon and never to be found again – what is commonly known as a “fly-away”
When you lose video in the FPV goggles, you can also just disarm or switch off transmitter to “emergency-land” your mini quad. This can prevent it from wandering around further, making the search harder.
How To Setup Failsafe?
Many transmitters and receivers support failsafe. If you are using a cheap radio, it might not support this feature, but perhaps you can still get it setup in the flight controller (e.g. in Betafligiht).
You should set up failsafe in at least one of these places, and it certainly doesn’t hurt to setup all of them to have extra layers of safety.
Most importantly, make sure you test failsafe thoroughly before taking off.
Further Reading: My Tools, Gears and Quads
Setup Failsafe in the Radio
The Frsky Taranis is one of the few radios that you can setup failsafe directly there, the failsafe settings will then be passed on to the receiver. If you use other radios, no big deal, just set it up in the flight controller or receiver.
So here is how to setup failsafe in the Taranis.
Go to the Setup Page on your Taranis, scroll down to “Internal RF Module”.
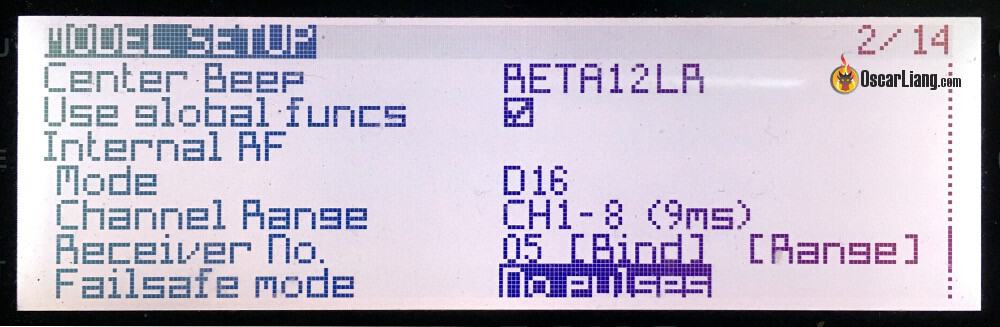
I recommend “No Pulses”. You also get the following options and here is what they do:
- Not Set, this is the default; When failsafe happens the quad will just fall to the ground (same as No Pulses as far as I can tell, but you sometimes get an annoying prompt at power up saying you haven’t setup failsafe)
- Hold, it will hold the last stick/switches positions; Maybe useful for planes and wings, but not a good idea for multirotors especially racing or acro quads as you might be doing a flip when FS happens and the quad will keep rolling until it crashes into the ground, or it might simply fly away…
- Custom, it might be useful if you use angle mode (self level), you can set a lower throttle level and the quad will slowly descent. This might be useful in case you can regain control before it hits the ground; But you don’t always know what would be below the quad, landing a quad without control with spinning props can be dangerous
- No Pulses, when failsafe is triggered, the quad will just stop and drop to the ground, in my opinion the ideal failsafe option for mini quad
- Receiver, failsafe on the TX will depend on the FS setting on the RX
Setup Failsafe on the Receiver
You should setup failsafe on the receiver if you are not using a flight controller, such as RC plane and flying wing.
Note: setting up failsafe on the receivers that are using analog protocols such as PWM and PPM, might actually prevent your flight controller from knowing failsafe has happened, and so it wouldn’t switch to failsafe mode. That’s because the receiver is still sending valid signals, and not the failsafe flag.
However, this is generally not the case for serial protocols such as SBUS, because it always sends the failsafe flag. So don’t worry if you are using SBUS, you can set it up on your receiver and your flight controller, and failsafe should still work. But don’t just take my words for it, please test your setup thoroughly before flying.
All radio receivers have failsafe, and most allow you to configure it in some way.
Frsky
For most Frsky receivers, there is a dedicated failsafe button (F/S or FS button), when pressed it remembers the stick and switch positions. When pressing the button, make sure the throttle stick is at its lowest position, arming switch at the disarmed position, and buzzer switch at the activated position.
If failsafe is not set or enabled, the default behaviour is to hold last stick position when the signal is lost, which you should avoid.
Check out this list of Frsky receivers for mini quads.

It’s explained pretty well in the Frsky receiver manual how to do this step by step:
- Bind the receiver first and turn on both the transmitter and receiver;
- Move the controls to the desired failsafe position for all channels;
- Held down the F/S button of the receiver (for a second). The GREEN LED of the receiver will
flash twice, indicating the failsafe position has been set in the receiver. - To disable/reset the failsafe function, re-bind the receiver.
Failsafe Configuration in Betaflight
If you have failsafe setup in your TX and/or RX, the defaults Failsafe configuration in Betaflight is just fine. All that matters is your motors stop spinning when you turn off the radio.
But if you can’t setup failsafe in neither your TX or RX, here is how I normally setup failsafe in Betaflight.

- Enable Expert mode, and a new tab “Failsafe” will appear
- Enable Failsafe Stage 2
- Check “Drop”, I don’t recommend using “Land” unless you are experienced enough and know what you are doing
- Only change the failsafe delay if you know what you are doing, otherwise leave it at default (e.g. you might want to increase delay if you fly over water and want to buy some time in case the radio link can recover by moving the TX around)
What are Stage 1 and Stage 2 Failsafe?
Stage 1 Failsafe is activated when the receiver reports failsafe to the flight controller.
If the failsafe lasts longer than the time you’ve specified in Betaflight, it will go into Stage 2. This is set to a second by default (guard time). Note that you can also activate Stage 2 Failsafe directly using a switch (setup in modes tab).
So do I need to change anything in Stage 1? It depends.
If the failsafe you are experiencing is just a temporary signal dropout, Stage 1 might give you a chance to regain control and recover without crashing. But if this happens, please land and investigate the cause of the signal issue.
Basically there are two options you should change for each channel, Auto or Hold.
If you normally fly in acro mode, then it’s best to set “Auto” to roll, pitch, and yaw channels. It basically stops any rotation in those axis when failsafe happens. With “Hold”, your quad will continue to spin which is really not a good idea. For Angle mode, it really doesn’t matter as the quad would be flying in a controlled fashion anyway, and Stage 1 only lasts less than a second.
When it comes to the throttle channel, it depends on your preference.
“Auto” will basically stop the motors, and your quad will just drop to the ground. “Hold” will, well, hold the throttle, which might make it easier for you to recover if signal is back. If not your quad will continue to travel for 1 extra second which might make the impact worse.
Testing Failsafe
To verify failsafe, remove your props, then plug in your battery and arm your copter, give it a tiny bit of throttle just enough to spin the motors. Then turn off your transmitter. Your motors should stop within 1 to 3 seconds at most. If your motors don’t stop when you turn off your transmitter, DO NOT FLY YOUR MULTIROTOR UNDER ANY CIRCUMSTANCES.
Advance Failsafe: Rescue Mode
Betaflight introduced a new failsafe option, Rescue mode.
Not exactly the same, but similar to Return to Home, the quad would fly back towards where it started with the help of a GPS module to restore signal link.
Here is the tutorial how to set up GPS rescue mode in Betaflight.
16 comments
Why not put it in level(horizontal)-mode with a littlebit of throttle? I’m thinking this is much better than dropping it, am I missing something?
Because spinning blades are dangerous and you never know if there’s a person below your quad. Also the quad could be drifting during slow descend which makes it harder to pinpoint where you crashed.
Oscar, could you go over ways to use this module to give GPS coordinates when your model is lost. I see one can record video of OSD. Is it possible to use Jumper T16 in a fashion similar to TBS TX Crossfire module w OLED to get last or even current GPS coordinates of a downed model???
try this: https://oscarliang.com/log-gps-coordinates-taranis/
I have wanted to set fail safe for my larger quads, for no one want to see $600 fly into the distance, I have set it up in custom, though when I go to BetaFlight the failsafe Icon remains on, thus I can not do anyhting with with the quad, Is there something that I have done in the process to make this happen. I really want to make sure this works, I have a lot of investment in my quads, and to be honest I have left this a bit late, though this year I am planing on buidling a long range rig, so I am really wanting to get the failsafe protocol correct, If you have time to help it would be greatly appreciated.
Yours
Richard Lothian
Sorry i am not following what your problem is.
Could you post some screenshot/images what issue you are encountering on IntoFPV.com?
i have my opentcx announce a number of things, how can i have it announce a failsafe? **i.e. what variable should i test for?** i can make my own audio.
TY!
hello,
i just built my first DIY racer, a 210.
With a QX7 and a XSR receiver (and DYS F4 pro V2 FC) i saw that failsafe is automaticly set with throttle at 0 and buzzer ON ! Thats cool. If i set failsafe on QX7 on no pulses instead of not set as it is by default, will i always get buzzer on ? I prefer ask before try?
TY
Thx. You are my go to quadcopter source.
thanks for all your hard work with these tutorials, it’s greatly appreciated
Hey Oscar :)
I used to just turn off my Taranis (after arming the quad) to check if failsafe works fine. It always did, set up as you describe (In Transmitter to “no pulses” and default in betaflight.) Running X4RSB and R-XSR receivers.
But, after updating to latest open tx on the Taranis (with luac script), it wont really turn off when i flip the power switch. As long as the quad is powered, the screen of my transmitter gives out a warning “model is powered”, and therefor the motors keep spinning till I disarm.
I can’t check the failsafe function any more, two new quads and I am concerned about this… any ideas how I could still check failsafe? Pull battery off Taranis? I am clueless, please help. Thank you! =)
I too test my failsafe prior flying and get the same message model is powered. What i do is then push the ENTER button which will force the transmitter to shut down without disarming and allows you to verify that the failsafe is ok.
I don’t get how to differentiate flight controller failsafe vs RX failsaife?
Hi Oscar~
I’m always thanks to your beautiful articles.
Those really helps me ;)
I’m usually set failsafe on Betaflight, and only stage 1.
Cut throttle and else what I thought safer.
What’s benefit of set stage2?
Earn sometimes to recover from RX lost?
As you said stage2 activating is worse when stuck on trees, I can’t find what’s benefit of stage2 for drop.
Basically Stage1 is the condition and Stage2 is the action in this case. You want to wait a little (delay) before shutting down the motors in case you can recover.
So thankyou Oscar.
I got it clearly now :)