
Betaflight GPS Rescue mode is similar to “Return to Home” on a DJI drone. This feature is designed to fly your FPV drone back to its launch point and land it automatically in a failsafe or when your video feed gets sketchy. In this tutorial, I’m going to walk you through setting up GPS Rescue Mode, testing it, and I’ll also share some tips on enhancing its performance and troubleshooting common issues.


Table of Contents
Why GPS Rescue is a Game-Changer
Betaflight’s default failsafe action is dropping the quad to the ground. Now, with the latest GPS Rescue Mode, your drone can return close to its launch point and land by itself! This is incredibly useful for long-range flights. Honestly, I’ve lost count of how many times GPS Rescue has saved my drones.
How to Choose the Best GPS?
Here are the considerations when picking a good GPS for Rescue mode:
- M10 GPS is the best.
- It Should Support UBLOX protocol, avoid NMEA protocol as it only supports 1Hz update rate and that’s too slow.
- Get the biggest GPS you can comfortably fit in your drone – bigger GPS comes with bigger antenna and it’s better for signal.
- If your GPS doesn’t reliably give you more than 10 satellites outdoor, it’s risky to use.
GPS Recommendations
See my GPS testing here: https://oscarliang.com/gps-review/
Top Performer: GEPRC M1025Q (With Compass)
- AliExpress: https://s.click.aliexpress.com/e/_DCihHmP
- GetFPV: https://oscarliang.com/product-zixk
Top Performer: HGLRC M100 5883 (With Compass)
- AliExpress: https://s.click.aliexpress.com/e/_DlLhgFd
- GetFPV: https://oscarliang.com/product-bf3p
- RDQ: https://oscarliang.com/product-0yby
Smallest Worth Having: GOKU GM10 Nano V3 (With Compass)
- AliExpress: https://s.click.aliexpress.com/e/_DEqdlNV
- Flywoo: https://oscarliang.com/product-lfo7
- GetFPV: https://oscarliang.com/product-tort
- RDQ: https://oscarliang.com/product-plki
Smallest Worth Having: FlyFishRC M10 Mini
- AliExpress: https://s.click.aliexpress.com/e/_DkCU7qr
Smallest Worth Having: HGLRC M100 Mini
- GetFPV: https://oscarliang.com/product-knfl
- RDQ: https://oscarliang.com/product-6zvg
- AliExpress: https://s.click.aliexpress.com/e/_DCXKBFj
Opting for a smaller GPS module helps save weight, but it does mean you’ll sacrifice a bit of sensitivity that comes with models with a large antenna.
Generation of GPS Chip
Most GPS modules for FPV drones use either an M8, M9 or M10 chip. M10 chips are the newest and offer the best performance, capable of connecting simultaneously to four Global GNSS systems (GPS, Galileo, Glonass, and Beidou). This results in faster lock-ons and connections to more satellites. Despite their superior performance, the price of M10 GPS is similar to M8, making them a cost-effective upgrade.
Antenna Scratches
Noticed scratches on your GPS antenna’s metallic patch? Don’t worry; this isn’t necessarily a sign of defect or damage. It’s often the result of factory tuning to ensure optimal frequency. These types of antenna have a nominal tuned frequency, but are often impacted by construction, components location and soldering. Placing small nicks in the centre of the long edges, or corners, can fine tune its frequency.
Is a Barometer Needed?
A barometer is used to estimate altitude by measuring air pressure.
Rescue mode needs to know the drone’s height, so a barometer is beneficial. Many modern flight controllers come with a built-in barometer, such as the BMP280 found on boards like the Speedybee F405 V4 and RushFPV F722 V2.
If your drone does not have a barometer, it is not the end of the world, because your GPS also provides altitude data.
Barometers usually respond more quickly than GPS modules, but they can also be noisier. On the other hand, unless a GPS has a good hDOP value, its altitude estimate can vary by several metres during a flight. Modern barometer chips, such as the DPS368, are typically faster and more accurate than most GPS modules. A barometer is not mandatory for Rescue mode to work, but it can improve altitude estimation accuracy, resulting in better altitude control and more reliable landings.
And remember, if you are applying conformal coating for water resistance, avoid coating the barometer, as this can cause incorrect altitude readings.
Is a Compass Necessary?
A compass (as known as magnetometer in Betaflight) is for determining which direction the drone is heading.
Betaflight GPS Rescue Mode DOES NOT require a compass to work, but using one can improve Rescue mode performance, especially in situations with crosswinds or during position hold, because it provides accurate heading information regardless of movement direction. Without a compass, Betaflight estimates heading from GPS data, which can be inaccurate when the drone is drifting (like in a crosswind), causing inefficient corrections.
However, while a compass can enhance performance, it adds complexity. It requires careful setup in Betaflight, extra wiring, proper mounting orientation, and calibration. It’s also sensitive to electrical noise, which can lead to inaccurate readings. For most people, a compass is not necessary unless you have special requirements.
Some GPS modules have built-in compass: GPS without compass have 4 wires, while those with a compass typically have 6 wires. The two extra wires are to connect to the i2c port on the flight controller (SCL and SDA).
Connecting GPS to Flight Controller
Wiring a GPS module to the flight controller is quite straightforward. Simply connect it directly to any available UART on the FC, (TX to RX, RX to TX), and power it with 5V.
- GPS RX – FC TX
- GPS TX – FC RX
- GPS 5V – FC 5V
- GPS GND – FC GND
- GPS SDA – FC SDA (if GPS has a compass)
- GPS SCL – FC SCL (if GPS has a compass)
Avoid using Softserial for your GPS connection, as it’s limited to a 19200 baud rate. At 9600 baud, GPS reliability for Rescue Mode is compromised. A hardware serial port is your best option for a stable and reliable connection.

Some flight controllers, like the Speedybee F405, feature 4V5 pads. These are essentially the same as 5V pads but have the added benefit of drawing power from USB. This is particularly handy for those times when the GPS is taking a while searching for satellites. By using the USB for power, you avoid the risk of your VTX overheating while waiting on the ground with a LiPo battery plugged in. It also helps the GPS lock faster since the VTX isn’t transmitting and causing interference. Note that some FCs might offer 5V pads powered by USB but under different labels; check with a multimeter if unsure.
How to Setup GPS in Betaflight
GPS Rescue mode in Betaflight is continuously evolving, so it’s crucial to use the latest firmware version for new features and bug fixes. I recommend upgrading to Betaflight v4.5 for this process: https://oscarliang.com/betaflight-4-5/
First, in the Configuration tab of the Betaflight Configurator, activate GPS for navigation and telemetry under the Other Features section. If GPS always deactivates after a reboot, it might be due to not selecting GPS in the Cloud Build options during firmware flashing.

Next, in the Ports tab, assign GPS to the appropriate UART under “Sensor Input.” Betaflight supports various baud rates: 9600, 19200, 38400, 57600, 115200. If you are unsure what baudrate your GPS module supports, selecting AUTO usually works.
The recommended baud rate for 10Hz GPS data rate is 38400 or 57600. There is little to be gained by using 115200 with 10hz, but using lower baud rates reduce the CPU load and are more resistant to electrical noise.
| GPS Data Rate | Baud Rate | CPU Load | Comments |
| 20Hz | 115200 | Highest | M10 only; test carefully! |
| 10Hz | 38400 or higher | Medium | 10Hz and 57600 is recommended for GPS Rescue |
| 5Hz | 19200 or higher | Medium | Okay settings for general use |
| 1Hz-2Hz | 9600 or higher | Least | Too slow for smooth GPS rescue, OK for simple position/speed info |

In the GPS tab, do the following:
- Select UBLOX as the Protocol, which is the standard for most GPS.
- Enable Auto Config.
- Enable Use Galileo – it improves positioning accuracy.
- Enable Set Home Point Once to prevent resetting the home location with each arm/disarm cycle until you unplug the battery.
- Choose Auto-detect for Ground Assistance Type to enhance positioning accuracy.
- Save and Reboot.

After setting up, the GPS indicator at the top of the configurator should light up, indicating communication with the FC. A red icon means GPS is talking to the FC but without a lock, and a yellow icon indicates a successful GPS lock.
If the GPS indicator remains off, check for
- GPS is not powered? Try plugging in battery?
- Incorrect parameters, for instance, wrong baud rate or protocol.
- Incorrect wiring, try swapping TX and RX.
![]()
How to check if GPS is working?
Wondering if your GPS module is talking to the flight controller? The ‘gpspassthrough’ command in the CLI can reveal any ongoing data exchange. Seeing a stream of binary data means communication is happening.
Run the ‘gpspassthrough‘ command in the CLI can reveal any ongoing data exchange between the FC and GPS.
Seeing a stream of hieroglyphic binary data characters means communication is happening. If you see nothing, there may be an issue with power, UART connection, or your setup.

Waiting for GPS Lock
Getting a GPS lock, or “3D fix,” requires locking onto at least four satellites and can take a few minutes.
When you power up the GPS module for the first time in a new location, it always takes longer to search for satellites, known as a “cold start”. Subsequent starts tend to be quicker as the module remembers satellite positions (for example when you change battery).
It’s harder to get a lock indoor. If you have to test this inside the house, try to get close to the windows with the antenna pointing to the sky.
You will see GPS related information under the GPS tab, where it shows the status of your lock, your GPS coordinates and location on a map, verifying the accuracy of your GPS lock.

LED Indicators
On most GPS such as the BN220, BN180 and BN880, there are two LED indicators, labelled “TX” (usually blue) and “PPS” (usually red).
Flashing blue (TX) indicates UART connection. If it is off, then the GPS is not sending data out. This is also an indicator of the refresh rate, in 1Hz it should flash once per second, while in 5Hz it will flash 5 times a second.
Flashing red (PPS) indicates the 2D/3D fix status of the GPS. If “PPS” is off then you don’t have a fix yet.
When it gets a 3D fix, the red LED on the BN-220 module should blink (together with the blue LED).

OSD
You can display GPS info in the OSD. Check out this tutorial about Betaflight OSD if you are not familiar with it. You can display GPS coordinates, distance and direction to home and more.

To know how many satellite have been acquired, place the gps sats element in your OSD. 6-8 is the minimum for rescue mode to work, the more the better. Your GPS coordinates will also get more accurate when you acquire more satellites.

HDOP
Consider enabling HDOP in your OSD.
HDOP is a measurement of how precise your GPS is (the health of your GPS lock). This explanation might be oversimplying, but just think of HDOP as how much the drone would be drifting horizontally in meters.
- A HDOP value of 1 or below is ideal, which would give you an accuracy of about 2.5 meters or less
- 1-2 is acceptable
- 2 or above, your GPS location isn’t very precise
To enable HDOP, go to the CLI, and enter:
set osd_gps_sats_show_hdop = on
save
If that doesn’t work, try replacing hdop with pdop in the command.
HDOP always appear next to the number of satellites.
Radio Telemetry
Once you have GPS setup and got a lock, go to the radio’s telemetry page, select “Discover new sensors”. Some GPS related new sensors should appear including GPS coordinates. This only works if your radio system supports Telemetry – such as ExpressLRS and Crossfire.
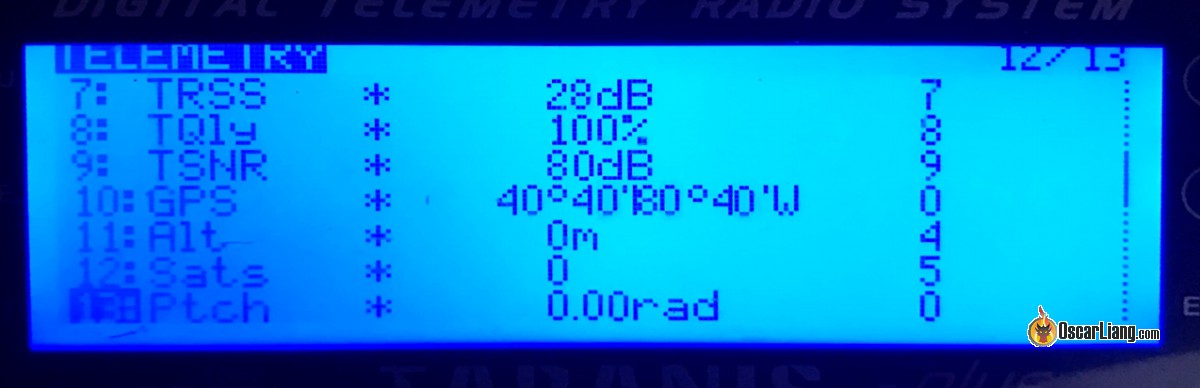
This allows you to log GPS coordinates in your radio, it allows you to keep track of the last known position of your aircraft. This can be helpful for searching for the lost quadcopter if you can’t see the coordinates in your DVR.
Testing Angle Mode
Betaflight’s GPS Rescue mode relies on Angle mode (a self-leveling flight mode) to stabilize the drone. Therefore, it’s essential to ensure Angle mode is functioning correctly.
First, verify that the Accelerometer is enabled in the Configuration tab.

Next, proceed to the Setup tab and calibrate the Accelerometer on a level surface. Failure to do so might result in the drone drifting while in Angle mode.

To test Angle mode, try hovering the drone to see if it’s self-levelling as expected. Remember, Angle mode uses only the Accelerometer and Gyro, so it won’t keep the drone perfectly stationary like a DJI drone would. A slight drift due to weight distribution and wind is normal, as long as the drone remains stable. If drifting is noticeable, you can trim the accelerometer in the Configuration tab to minimize it using stick commands on the ground (but unlikely to completely eliminate it so don’t worry).
Also, take note of the throttle position during hover (with a half discharged battery). This value will be useful when setting up Rescue mode later.
Disabling Magnetometer
As recommended by Betaflight Developers, unless you are absolutely sure that your Magnetometer (aka compass) has been properly calibrated and is working correctly, otherwise you should disable it (in the Configuration tab, under Accelerometer and Barometer). Betaflight Rescue Mode does not depend on Magnetometer so it’s fine to disable it.

To check if your magnetometer is working, compare the compass value in your phone (set to show True North, not Magnetic North), with the heading on Configurator’s main opening screen, the GPS tab in Configurator, or the Sensors tab debug line 5 in debug mode GPS_RESCUE_HEADING, and check that both are within 10 degrees of each other. If the heading always starts at North, and follows fast movements quickly but then jumps to some other value, the Mag is not right.
Avoid Using 8K/8K
As per developers recommendations, avoid 8K PID Loop Frequency, use 4K or lower. This is due to the CPU intensive nature of Rescue Mode, especially with high baud rate such as 56700 or higher. Lowering PID looptime will leave more CPU headroom for Rescue mode to work more reliably.
Enabling GPS Rescue Mode in Failsafe
Navigate to the Failsafe tab in the Betaflight Configurator. If you can’t find this tab, make sure you’ve enabled the “Expert Mode” option at the top of the screen (next to the Update Firmware button).
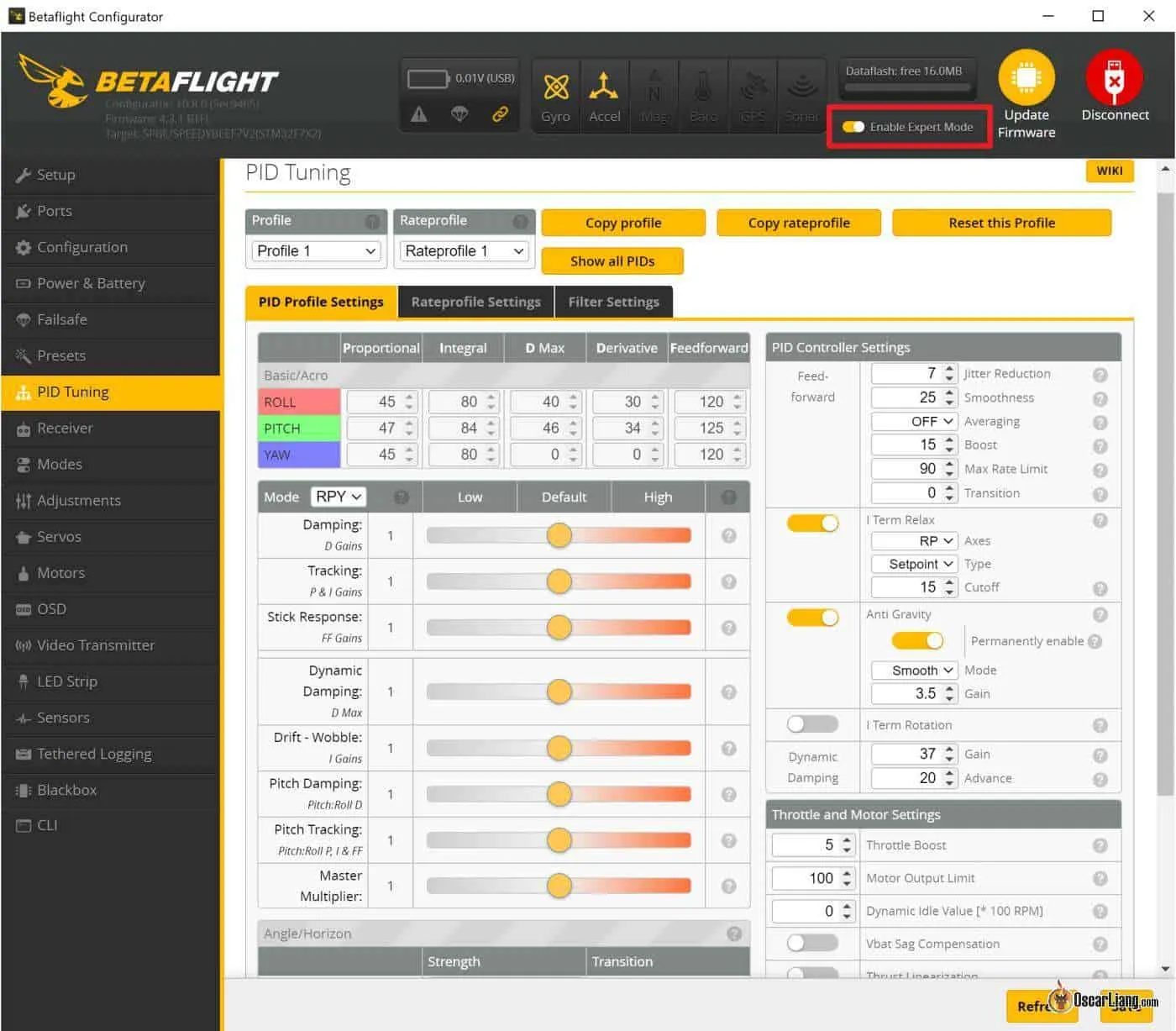
Under Stage 2, select GPS Rescue. Now, if your drone enters failsafe, it will trigger GPS Rescue Mode.

So, what exactly is failsafe, and what are stage 1 and stage 2? Here’s a quick rundown: Your drone enters failsafe upon losing radio signal. By default, it would just drop to the ground, but with Rescue Mode, it will attempt to return home.
During a failsafe, your drone will first enter Stage 1, pausing briefly (guard time) to see if the signal returns. If not, it progresses to Stage 2, activating Rescue mode to bring the quad back.
While setting GPS Rescue as your failsafe method is beneficial, it’s not suited for all environments. For instance, it’s not advisable in bando, forests, stadiums, or indoors. Losing control under a tree or inside a building could result in the drone crashing into obstacles when Rescue mode engages.
If you have no GPS lock when it failsafes, the quad will (should) just drop to the ground.
What Happens after Rescue Mode is Activated?
Watch GPS Rescue Mode in action here:
Rescue mode involves 5 phases:
- Self Level: The drone enables Angle Mode and self level.
- Ascend: The drone climbs to a user-configured altitude.
- Rotate: It turns towards the home direction.
- Fly Home: The drone begins its journey back to the launch point. The flight might not be a smooth cruise, as the drone might pitch forth and back trying to control its speed.
- Descend: Once near the launch point, it starts descending slowly. The descent might be uneven, with the motors making pulsating sounds as the drone tries to slow down.
- Land: Upon touching the ground, the drone automatically disarms, with motors terminating based on impact, not based on altitude.
How to Stop Rescue Mode
If Rescue mode was activated via a switch, regaining full control is as simple as disengaging that switch.
If activated by failsafe:
- If it’s a real failsafe triggered by a loss radio link, the pilot must move the sticks more than 30% to regain control after radio link comes back.
- If the failsafe was triggered manually via a switch, simply disengage the failsafe switch — no need to wiggle the sticks.
GPS Rescue Settings Explained
Settings for GPS Rescue mode are available in the Failsafe tab.

You have to tweak the GPS Rescue settings in Betaflight to your specific setup and environment. I highly recommend visiting the Betaflight wiki to grasp a full understanding of what each parameter entails: https://github.com/betaflight/betaflight/pull/11579. The default settings offer a solid starting point, especially for 5″ freestyle drones.
Here, I’ll walk you through the settings, sharing the values I use on my 5″ freestyle drone and the reasoning behind each choice.
Accessing all settings is straightforward via CLI—just enter get gps_rescue for a comprehensive list of GPS-related parameters. However, adjusting them in the GUI (Failsafe tab) tends to be more user-friendly.
Altitude Mode: It determines the altitude at which the quad returns home.
- Maximum altitude is the highest altitude your quad is flown during that flight
- Fixed altitude is just a predefined value
- Current altitude is whatever height that the quad is at when GPS rescue mode is activated
The best choice varies with each flight’s context and environment. Maximum altitude can be a safe option, but it’s not always the right option. For instance, if you was diving a mountain in that flight, you could be wasting energy climbing back to the max altitude when Rescue mode is activated. When flying over ocean where there’s no obstructions, fixed altitude could be a good option. Use common sense, be adaptive to the different environment and missions.
Initial Climb (meters): The distance the quad will climb to this height above the current altitude, when a rescue is initiated and the altitude mode is set to Current Altitude. Also added when in Max Altitude Mode.
Return Altitude (meters): Only applies in Fixed Altitude mode. This determines the drone’s return altitude relative to its takeoff point. It should be high enough to clear any obstacles like trees and buildings but not so high that it excessively consumes battery during ascent. For my flying spots, which features tall trees and small hills, I’ve bumped this up to 50 meters.
Ascend/Descend Rate (meters/second): These rates depend on your environment, weather, and quad’s power. For my 5″ setup, the defaults should work well. If using Li-ion packs or low C-rating LiPo, consider a lower ascend rate.
Return ground speed (meters/second): This is the speed at which the quad travels during Rescue. The default 5m/s is 18km/h which I find way too slow for most drones, I normally double that to 12m/s (43km/h) for micro drones, or 17m/s (60km/h) for 5″ and 7″ drones. The quad’s travel direction would be more accurate and update faster in higher speed (in the absence of a compass). Do not set it to lower than 2m/s or orientation won’t work. Note when entering this value in GUI, the unit is different than CLI (which is cm/s).
Maximum Pitch Angle: This setting caps the drone’s tilt angle. A higher angle leads to more aggressive returns and higher speed. Maybe useful for heavier, high drag and low authority drones. In windy conditions, a higher angle might be necessary for maintaining speed, especially for smaller quads. However, with an excessively steep angle the drone could lose altitude and crash. Unsure of what to set? Starting with the default value of 40 degrees is a safe bet—it’s worked well for my 4inch and 5inch setup.
Descend Distance (meters): This is the distance from home our drone starts to descend. I stick with the default here.
Throttle minimum, Throttle maximum, Throttle hover – these are the min, max and hover throttle values you want to use during Rescue mode – 1000 is 0% throttle, and 2000 is 100% throttle. Set maximum so the quad isn’t too fast/jerky (it should be above your hover point), set min to keep the props spinning at a reasonable rate (it should be lower than your hover point). Default Min/Max values usually work fine for the majority of the quads out there.
Why are 1000 and 2000 used as the minimum and maximum throttle values? These are legacy settings from back in the day when we were using PWM signals to control servos and ESCs.
However, to set Throttle Hover, you need to determine an accurate value. Test fly your quad and see at what throttle it hovers (enough throttle to keep the quad afloat). Use the “Throttle %” OSD element to get the exact value instead of just guessing. Tips: the ideal value should cause the quad to climb a bit while in level mode, if the hover value is set too low, the quad will drop early in the rescue – possibly into the water! And the hover throttle value is going to be slightly different depends on battery voltage, so you might wonder, what throttle value should I use? Well you got to ask yourself, at what battery voltage you are most likely going to get a failsafe? It’s got to be when the drone is the farthest from you right? And you are probably just before half way through the battery, around 3.8V to 3.9V. So use the hover throttle value at this voltage.
Minimum Distance to Home (meters): If Rescue starts too close to home (within this minimum distance), the drone will fly away on its current heading until this distance from home, and start the normal Rescue behaviour. I leave this at the default 15 meters.
Minimum Satellites: A minimum of 8 satellites ensures reliable Rescue mode operation. If you take off before the GPS reach the minimum amount of satellites, it won’t know the exact home location. More satellites mean better accuracy. I leave this at the default, 8.
Allow Arming Without Fix: This option provides flexibility by allowing arming without a GPS lock. I enable this for the convenience of test flights, but ensure you get a GPS lock for when you intend to use GPS Rescue Mode.
Beware that GPS Rescue WILL NOT work for that flight if you arm before getting a satellite lock (because it doesn’t know the home position).
If you have trouble getting these many sats (or it takes a long time), check out my tutorial on how to boost your GPS receiver performance. Get a new GPS if you must, they only cost $15, a great investment for protecting your $300 quad!
Sanity Checks: When set to “ON”, it monitors GPS Rescue mode conditions, for example:
- Is the GPS still connected to the FC?
- Are we getting a good number of satellite locks?
- Are we at least 20 meters away from home?
- Are we getting closer to the home, and we didn’t hit an obstacle?
If any of these conditions are not met, it will abort rescue mode and your quad will just disarm and drop to the ground. So yea, it’s not ideal if you are flying over unrecoverable places like ocean or mountains, but generally, it should be on for safety reasons.
The Betaflight wiki also recommends setting Sanity Checks to “Failsafe Only” if you are having trouble with the option “On” during testing. It turns Sanity Checks off when Rescue mode is activated by a switch but only turns it on when it’s in failsafe. This is also my preferred option.
It’s risky to turn off Sanity Check entirely, you might get an indefinite flyaway. In Betaflight 4.4, there is now a limit of 20s of sanity failure even if all sanity checks are off. It is a safety thing. Never fly with all sanity checks off.
How to Manually Activate GPS Rescue?
Besides failsafe, you have the option to manually trigger GPS Rescue by flipping a switch on your radio transmitter. This feature comes in handy during emergencies, such as losing your way or encountering issues with your FPV system, allowing your drone to autonomously return home.
Go to the Modes tab in Betaflight Configurator and assign an AUX channel specifically for GPS Rescue Mode. If you’re new to configuring modes, check out my tutorial here: https://oscarliang.com/betaflight-modes/

Throttle Channel Fallback
During Stage 1 of a failsafe, your drone goes into channel fallback, meaning each radio channel is set to predefined values. It’s wise to review these values to ensure safety.
By default, the Channel Fallback for Throttle is set to “Auto,” which reduces the throttle to zero, results in the motors stopping momentarily during the guard time. This interruption could destabilize the drone before GPS Rescue kicks in, potentially failing a sanity check and causing the drone to drop to the ground.
One solution is to adjust the Throttle Channel Fallback from “Auto” to “Hold,” maintaining the last throttle value throughout the guard time, preventing motor stalling.
However, I personally prefer setting the throttle to the hover value, as well as centering all roll/pitch/yaw channels (set them to 1500 or auto), and activates the switch for Angle mode. This way, the quad levels itself out when failsafe happens, before GPS Rescue engages.
Remember, never set throttle to zero during Stage 1 of failsafe!

How to Test GPS Rescue
Testing GPS Rescue is a crucial step before relying on it in real-world scenarios. Here’s my approach to ensuring it works as expected.
The Setup
First, assign a switch on your radio to GPS Rescue to confirm it can indeed bring your drone home. Should anything not go according to plan, flicking the switch off should immediately return control to you.
Next, allocate another switch to Failsafe in the Modes tab. This simulates a full failsafe event, just like losing RC signal, but in a much safer manner since you can exit the mode whenever necessary using the switch. It’s important to note that this setup is strictly for testing purposes. Once you’re finished, remember to remove Failsafe in the Modes tab.

With the propellers removed, head to the Modes tab and ensure that activating the Failsafe switch indeed triggers Rescue mode, during which your radio sticks will be momentarily locked out. Verify if you can exit failsafe mode and regain control smoothly.
While bench testing with a USB connection, the Rescue mode indicator might not illuminate as other flight modes do. However, as long as the small yellow bar bar moves into the activation zone, it’s working correctly.
Incorporating GPS-related information into your OSD is beneficial, providing insights into the drone’s status. The Flight Mode indicator is particularly helpful, displaying “RESC” when in Rescue mode, “Air” in rate mode, and “Angle” in angle mode.

Field Testing
For an actual test, choose an open area free from obstacles and people, with soft grass. Ensure you have a valid home point before taking off – ideally the OSD should show at least 8 satellites or more.
Take off and fly 50-100 meters away, close to the ground, then trigger Failsafe mode using the switch. The quad should promptly switch to GPS Rescue mode, indicated by flight mode in the OSD as it changes from AIR to RSC.
Pay attention to the home arrow in the OSD; when it’s pointing up, means you’re heading home, when pointing down means you’re flying away. Initially, the arrow might point in the wrong direction if you are not using a magnetometer, which is normal as it takes 5 to 10 seconds for Betaflight to work out which direction it’s heading—just ensure the drone isn’t flying the complete opposite direction after 10 seconds.
You can quit failsafe mode at any time by flipping the switch, regaining full control immediately.
If you choose not to disengage, the drone will continue flying back to the launch point. Upon arrival, it will hover briefly before starting a slow descent, during which the motors may pulsate, until it safely lands and disarms automatically.
You may want to repeat this process a few times, until you’re confident in the system’s reliability. After thorough testing, don’t forget to remove Failsafe from the Modes tab.
Tips and Troubleshooting
Best Places to Mount GPS Module
Making sure your GPS module’s ceramic patch antenna has an unobstructed view of the sky is crucial for quick and reliable satellite lock-on. Anything covering it, particularly conductive materials like carbon fiber, electrical wires, or metal, can significantly weaken the GPS signal.
Avoiding EMI
Electromagnetic interference (EMI) from other electrical components on your quad can also affect GPS performance. Notable sources of RF interference include HD cameras and video transmitters. To mitigate this, mount your GPS as far away from these devices as possible.
Proper Mounting Orientation
A common error is mounting the GPS upside down. The receiver antenna, identifiable by its flat square shape with a small metal circular part in the center, should always face upwards. Ensure no components obstruct this side. In the following image for example, the ceramic antenna is facing up.

Where to Mount GPS
Here are the considerations when mounting your GPS on a quad:
- Tthere’s nothing blocking the GPS unit
- The ceramic antenna is pointing to the sky
- Ideal mounting spots include the top of your quad, far away from VTX and RX antennas
- Keep away from potential radiation sources like HD cameras that might lack proper EMI shielding
Here are a few mounting ideas:


On top of your GoPro/HD camera.

On top of the frame if using an under-slung battery setup.

On a mast to elevate the GPS away from the quad. However, be cautious of proximity to VTX antennas.

One of my favourite ways is to install the GPS on the battery strap.

Getting a GPS Lock Faster
Most GPS modules feature a small battery to store satellite data and time, aiding faster lock-on. Once the GPS has locked onto satellites, it retains their positions for quick reconnection after battery changes. If your GPS consistently takes long to lock, check if its battery is depleted using a multimeter. Minimize interference as much as possible—for instance, by relocating a powerful VTX, especially if you’re on a 1.3GHz FPV setup. Weather conditions like cloudy days can also impact GPS signal quality.
For more tips on optimizing BN220 for increased satellite locks, check out my dedicated tutorial: https://oscarliang.com/gps-settings-u-center/
Suggestions directly from Betaflight Developers
I recommend 10 satellites. [And] Wait for 30s after [you have] 10 satellites for altitude to stabilise [before taking off].
Always confirm normal GPS Rescue behaviour at the start of a critical flight by testing with the failsafe switch. Set the switch to immediately enter Stage 2. You can enter and leave GPS Rescue via the switch with immediate on and off effect. Check that the quad rotates and flies towards home and does the right things before you are so far away that a true failsafe may occur.
ALWAYS CHECK that the Home Arrow points directly back towards home after takeoff! Sometimes, if you take off and spin around during arming or immediately on takeoff, the quad’s attitude information can become corrupted, and the Home Arrow can point the wrong way. It’s best to arm cleanly and fly away from Home in a straight line at a reasonable speed immediately after takeoff. Watch the Home Arrow carefully to ensure it quickly points back to Home. If the Home Arrow points the wrong way when a failsafe occurs, the GPS Rescue will initially fly off in the wrong direction, and in some cases, you may lose the quad.
Wrong Direction in Rescue Mode?
Without a compass, rescue mode should still work as the quads calculate direction through GPS data comparison.
At the beginning, your quad might be wandering around or even flying towards the wrong direction but eventually it should self-correct. With weak GPS connection, it can take longer to correct.
If you are using a compass and it’s flying the wrong direction, then maybe there’s something wrong with the compass, or maybe it’s not calibrated properly. In this case try turning off magnetometer in Betaflight and try again. If it works now, it proves your compass is the source of the problem.
If your yaw is jerky during Rescue mode, your GPS might be updating too slowly (e.g. 1Hz), try to increase it to 5Hz or even 10Hz following this guide (only works on certain GPS modules).
Checking GPS Accuracy (HDOP/PDOP)
HDOP and PDOP are measurements of how accurate your GPS is. Lower values mean better accuracy. In INAV they use HDOP and in Betaflight 4.5, they use PDOP.
HDOP (Horizontal Dilution of Precision) and PDOP (Position Dilution of Precision) are both measures of GPS accuracy, but they focus on different aspects. HDOP primarily reflects the accuracy of horizontal position (longitude and latitude), while PDOP considers the accuracy of both horizontal and vertical positioning (latitude, longitude, and altitude).
You can display PDOP in Betaflight OSD by entering set osd_gps_sats_show_hdop = ON in the CLI. Here is what the value means:
- 1.0 to 1.5: Excellent accuracy, very stable GPS lock.
- 1.5 to 2.0: Acceptable, minor drifting might occur.
- 2.0 to 3.0+: Poor accuracy, significant position drift is common.
More satellites typically lower your PDOP/HDOP, improving GPS accuracy. Electronic interference, especially from devices like GoPro cameras or Wi-Fi, can negatively affect PDOP/HDOP and cause instability in GPS hold mode.
Avoid Softserial
Avoid using Softserial for GPS Rescue as it’s too slow. You may use it to display GPS related info on the OSD, but it’s simply not reliable enough for GPS Rescue. It’s best to use a hardware serial port (any TX and RX pins on the FC), and set baudrate to at least 57600.
Not Getting GPS Lock
Interference from your quad’s electronics, such as the VTX, telemetry-equipped radio receivers, or even wires carrying significant current, can hinder your GPS’s ability to lock onto satellites. If you’re facing difficulties achieving a GPS lock, consider the following steps:
- Power the Flight Controller (FC) via USB to check if it powers the GPS module. If not, move the GPS module’s power connection to a different pad on the FC that gets power from the USB port.
- Isolate the FC’s Power Supply: Powering only the FC without the VTX can help you get a quicker GPS lock. Nevertheless, it’s advisable to mount your GPS as far as possible from both the VTX and RX antennas to minimize potential interference.
- Shielding Electrical Wires: shielding wires that conduct significant current can mitigate interference. These wires can act like antennas, potentially disrupting GPS signals.
GPS satellites operate on two frequencies, L1 1575.42MHz and L2 1227.60MHz. Consequently, a 1.3GHz FPV setup might interfere with your GPS. The majority of pilots use 5.8GHz, which generally avoids this problem. However, given the weak GPS signal—originating from satellites in space—even strong nearby signals can cause interference. Thus, positioning the GPS module away from any transmission sources is crucial.
Running GPS wires under the VTX can cause issues, particularly if the VTX lacks adequate RF shielding. This RF noise can compromise GPS functionality. For example, the Avatar VTX V1 was known to cause GPS problems when wires are routed underneath it. A potential fix involves grounding the VTX’s shielding. Alternatively, shielding the wires between the GPS and FC—and ensuring they’re grounded—might offer a solution.

I tried to shield wires with foil in one of my builds, then connected the foil to a ground pad on the FC. After wrapping it with cloth tape to prevent short-circuiting the frame, I noticed minimal improvement. While some have reported positive outcomes with this modification, it’s worth exploring if other straightforward solutions are unavailable.
Failed to Activate GPS After Updating Betaflight
If you’re unable to enable GPS after flashing the latest Betaflight version, it’s possible that some features including GPS were excluded from the compiled firmware – a new feature called Cloud Build System.
To verify if this is the problem, enter the following command in the CLI:
feature gps
Should the CLI respond with “gps not available,” it indicates that the GPS functionality was not included in your FC’s Betaflight firmware. To resolve this, you’ll need to reflash your FC. This time, ensure that the GPS option is selected in the Cloud Build system during compilation: https://oscarliang.com/flash-update-betaflight/#Cloud-Build-System
Understanding GPS Coordinates Precision
When displaying GPS coordinates in the OSD, you’re provided with options to choose the number of decimal places shown—currently, only 4 and 7 decimal options are available. This selection directly influences how accurately you can pinpoint a location on a map based on the GPS data.
The “Decimal Degrees” Wikipedia page provides a detailed table comparing degree precision to physical distance:
decimal places degrees distance ------- ------- -------- 0 1 111 km 1 0.1 11.1 km 2 0.01 1.11 km 3 0.001 111 m 4 0.0001 11.1 m 5 0.00001 1.11 m 6 0.000001 11.1 cm 7 0.0000001 1.11 cm 8 0.00000001 1.11 mm
It’s crucial to differentiate between accuracy and precision in this context. The GPS may display a high degree of precision (number of digits), but not all decimal places may reflect true accuracy. This means that while your GPS can report coordinates to a very fine resolution, the actual accuracy—how close those coordinates are to the real location—may vary.
Edit History
- Oct 2018: Tutorial creation.
- Aug 2020: Updates for GUI and CLI parameter changes, addition of throttle settings.
- Feb 2023: BF4.4 update with auto-landing feature.
- Mar 2024: BF4.5 update.
- Apr 2025: updated
131 comments
PSA: the Flywoo Goku GM10 Mini V3 which came with my Flywoo Explorer LR4 purchased December 2025, has a single (green) LED: ON means it’s energized but has no GPS fix, and blinking once per second means it has a GPS fix (which, with this specific GPS module, means it has locked onto at least 5 satellites).
I was testing the gps rescue the other day, everything was going pretty smooth with “Land”. While triggering failsafe on Gps rescue it was also going fine, until it ascended to around 50m, stayed there for like 5-6 sec and then disarmed which caused the drone falling to the ground top-down :( luckily the grass was pretty soft and there was completely no damage. I’m scared now to test again even though i precisely set my throtle hover (at 1165 + min at 1150 + max at 1180) so it doesn’t go crazy. Do you know what may gone wrong during this test? Also are those min/max throttle values not too small if I set 15 m/s return ground speed? Appreciate your answers!
I expect min and especially max to be quite different from hover.
In the screenshot above, Oscar has 1100 for min 1700 for max, 1230 for hover.
Also if you try GPS rescue again, maybe switch to GPS rescue when you’re a few meters from the floor, and set the ascend to just a few meter, so that if it falls again, it doesn’t fall from too high? Or get ready to switch GPS rescue mode fast to take control back?
Thank you
“On most GPS such as the BN220, BN180 and BN880, there are two LED indicators, labelled “TX” (usually blue) and “PPS” (usually red).”
Glad you did delve into the PPS a bit.
For PPS pad, on the BN181, is there a pad corresponding to it on the FC (Flight Controller)?
Thank you for this valuable information.
“In INAV they use HDOP and in Betaflight 4.5, they use PDOP.”
Funny thing is, apparently INAV also uses PDOP, it’s just that they stuck with the HDOP name.
Hi, using a flywoo explorer with Li-Ion pack. From my OSD I have 70% throttle hover. This would be a 1700 throttle hover value. Is that crazy high?
Also on testing the rescue, the drone did not turn before flying back. It flew back in reverse. Any experience with this?
Thanks!
Buenas tengo un problema con el gps, el otro dia probando lo del rescue, los drones venian hacia uno y cuando tocaba la hora de descender bajaban a fuego, revise en casa y lo tenia a 7.5 de velocidad de descenso, porque puede ser que haga eso, estoy un poco perdido con este tema, y pienso que algo debo tener mal configurado, gracias.
hi Oscar, I hope you can help me getting my GPS (goku mini v3) telemetry to my RM boxer. Telemetry is on in receiver tab. Gps data shows in goggles 2 and betaflight. I played with packet rates; deleted all sensors and discovered new; and still no GPS data on the Tx. I connected another drone and the data came up no problem. any Ideas???
Are you using ExpressLRS? You are sure you are using CRSF protocol and not SBUS which doesn’t do telemetry?
Also make sure you have enable Telemetry Ratio in the ExpressLRS LUA script in case you switched it off by accident.
Also make sure you have GPS lock when you check this on your radio, without a lock you probably won’t get any gps telemetry data. And you also probably want to try arming the quad before checking see if that does the trick.
Hi Oscar
Elrs – version 3.5.3
CRSF – yes
Telemetry – on in betaflight, on in lua script
Gps – locked
Drone – armed.
And still no telemetry to the radio
Fc xilo f405 –
Gps on uart 4 (5v, gnd, tx , rx)
Receiver RP4TD-M on uart 1 with rx1 sbus tx1 dsm . I used inverted crsf on receiver
Thanks for your time.
That’s a pitty that there is not separate descent rate for landing. If I set for example return altitude 100m and the rescue is turned on at 500m, it takes ages to drop down to 100m. But If I set it to drop fast, it will basically crash when landing…they should sepate those two descend situations…
Thank you for this gem of an article and the many original information. Studying also the readers’ comments, seeing other readers issues and other readers tips; and your interaction and replies to the readers does greatly expand the understanding of the subject presented. I do thank you Oscar for what you do. (And thank you for making it easy to leave a comment.)
You have channel fallback on *angle* set to 1000 in one example and set to 2000 in another screenshot. Which is correct and why? My throttle needed to hover percentage is ~22% – does that effect this number? or the min max rpm settings?
I previously had angle mode enabled on the HIGH switch position, therefore the fallback was set to 2000. But now I normally have angled mode enabled on the LOW position, so fallback is set to 1000. The screenshots were taken at different times through the years. The fallback value depend on how you setup your angle mode switch – whichever value would enable angle mode.
OK, got it, I was misunderstanding what that value does. thanks so much.
would you use the GEP-M8U from geprc, im in Australia and couldn’t find the other one from geprc that you have listed,
cheers
Jacob
I would not use buy it if i have other options. It’s expensive and uses the older M8 chip i believe as the name suggest (I don’t see the specs says otherwise).
Hello,
is there any chance to set “Allow arming without fix” on a switch to toggle this feature on the remote, rather than connecting to a laptop / dongle? So you could switch from indoor / outdoor use quickly.
Thanks!
Geerd
afaik it’s not possible.
This needs to be updated because HDop is now PDop in BF4.5 full release. Exact same CLI entry just change to PDop.
I’m curious how you determine the Throttle hower value? It differs when the battery is fully charged and when it is almost empty. So, if the value is determined in fully charged state, the drone will fall to the ground when the Rescue mode triggers and the battery is low. Also the opposite, when the hover throttle value is determined in the low battery state, the drone will shoot to the sky when the Rescue mode trigers with fully charged battery. For my quad even a small nuance in the throttle makes a big difference if it hovers, descends or ascends and the hover value moves up, when the battery is low…anyone thought about that?
Excelente!!! Maestro!! Muchas gracias.
Great job – especially also ‘the details’. thx.
Even so: when in rescue-mode, you can also use the throttle? I guess not, right?
No, you have no control on throttle as it’s managed by the Initial Altitude value.
Hello: avaible for immersionrc vortex 250 / 230 mojo ?? Thanks
when the nano rx tbs failsafe is cut??the failsafe is working?
Correct!
Hey Oscar,
As of April 2023, what GPS is the best right now for 5inch and whoops? Will be used with BF4.4 return to home
I shall update the list of GPS here soon, but for now please refer to the latest GPS that i recommend: https://oscarliang.com/best-5-inch-fpv-drone-parts/#Accessories
Is failsafe in Betaflight activated on Vtx loss, as well? Or just radio link loss? It’s not clear to me what happens if there is video loss. I’m assuming the failsafe is not activated, and that’s why we should keep GPS rescue on a switch. I just want to be 100% sure!
No. However you can manually activate Rescue mode in the event of a video loss. You can assign GPS Rescue mode to a switch on your radio. Failsafe mode is only for testing, you should remove it as soon as you are done with testing.
Hi Oscar, very nice post
I have tried to activate rescue mode (switch) at low altitude (4-5m) and it drops to the ground. Could be related with the initial altitude parameter? Is it necesary to activate rescue highier than this parameter?
Thanks
It should still work at this height. Were you outside of the minimum distance to home? And did you have enough satellites? If it just drops to the ground, sanity check is probably didn’t go through because something was wrong.
May also test it .. when it’s actually on the ground. Initially. (ps: maybe your hoover-number is wrong?). I used the black-box to figure out that hoover-value.
I had this same issue and it was because I had left Throttle fallback to AUTO. The problem went away when I set that fallback to “SET” and the correct hover value.
Very coo! What happens if you have no satellites and the quad goes into failsafe?
it should just drop to the ground.
Merci beaucoup pour cette belle explication 👏👏👏
Hello Oscar!
Thank you for your post, it helped me a lot! I could set up the GPS properly, but after I updated the firmware for the Betaflight 4.3, the GPS is not working anymore. No gps sign, nor any gps data on the gps tab. Do you know any solutions? I used the same settings as before. (HGLRC M80pro with a geprc cinelog 35 flight controller and caddx vista.)
Thank you for your help!
it’s really great that you take the trouble to write all this information together instead of putting it all in one youtube video. thank you very much for the hard work. please go on!
Amen to a searchable written document instead of a youtube video!
hej i have the tyro 119 with the accst taranis x9d
build it all and it all works
if i install all the modes on bf it works until i come to gps rescue or failsafe
then nothing on the quad will work even if i put all the modes back
need to restart the quad and the taranis and start all over again.
then if i do all the basic stuff the quad and taranis work and i can fly but nog with gps if i put it on it is okay but when i want to set the failsafe or gps rescue it is again blocked up and need to restart
WHO CAN HELP!!!
I have the same exact problem, it will get stuck in rescue / fail-safe mode and wont come out when you flip the switch or turn on the radio and all controls are locked out until FC is rebooted
Hi Oscar, I saw a reviewer saying that GPS rescue triggers on critical low battery? Is this true?
Hi Oscar, some say put throttle in hold some say leave it in auto, I trust you so you tell us please
Hi, is there a way to warm start the gps position ? i.e. connect the drone to a mobile phone, and send it the current position ?
TBS CROSSFIRE/ TRACER – MAVLink by WiFi
Ground control software like Mission Planner or APP QGroundControl
How it going Oscar I have a novice 4 that I enabled gps rescue to an aux switch now I can’t arm it in drop or land mode in the osd anymore? Before I assigned the switch I could arm in drop or land but couldn’t in gps ” I know because I didn’t have the required 6 sats” also the arm without fix was disabled from the factory all I wanted was gps rescue on an aux switch now I have lost the ability to arm in drop or land and even gps unless I get the minimum sats why is this happening? Also my 3d fix says false but
with this model all I was so supposed to be able to do was enable gps rescue which was done factory already and just assign my aux switch and that’s it but now I’m having these issues unless I turn off take off without a fix Thanks man I would love to hear back for this issue
If you enable “warning” in OSD element, that should tell you why it’s not arming on the screen?
If that doesn’t say it, you can follow my troubleshooting guide to find out why it’s not arming.
What is low throttle delay
Hi Oscar, Ive set up GPS rescue on my Iflight XL5 Quad HD. Im having issues my GPS Rescue. When I activate via an Aux switch to test it, the quad does not fly towards where it took off from. For what ever reason it always seems to fly off in the same direction no matter how many sats I have. In BF I have it set to a Minimum of 8 sats. The GPS unit has a compass and I have that connected, activated and calibrated. It seems that home point is never correctly set when I take off… Im at a loss as to what could be the issue. The GPS unit sits off the back of the quad underneath the DJI antennas. I’m running crossfire and that antenna is below and behind GPS unit. Do you think these could be causing some sort of issue?? Appreciate your thoughts. Cheers Matt
Have you tried disconnecting the compass in Betaflight (and the wires)? It should work without compass.
Also get the GPS co-ordinate of your home position from the OSD, and check it in google map see if the location is correct?
Hi Oscar. I tested failsafe by switching off my radio while the copter was about 5 meters in the air. I noticed that there was about a 1 second pause between when the motors stopped spinning and the GPS rescue kicked in, causing the copter to fall a few meters towards the ground before rising up again. How can I set it up so that the instant the signal is lost the GPS rescue will activate before the motors stop spinning?
My stage 2 guard time was set to 0.4 seconds by default, and throttle fallback was set to Auto.
Would setting the stage 2 guard time to 1 second, or setting throttle fallback to set = 1500 prevent this motor pause at signal loss?
Thanks
Steve
Can you try the following:
assign a Aux channel to rescue mode.
in Failsafe tab, Channel fallback settings, set that channel value to activate Rescue mode.
When Failsafe kicks in, Rescue mode should be activated immediately.
This is really useful. I tested my set up today, on a switch, and everything worked except regaining control.
It came back to me then hovered up and down in front of me. I could not regain control at all.
Reading more into it, I think it may be down to stick deflection. The default is set to 30% which means you need to move a stick more than 30% to regain control.
But flicking the switch out of rescue mode did nothing… would that be the same reason? Because in essence it’s locked in rescue mode until I move a stick more than 30%?
Same for me. You have to move the stick to regain control. I don’t understand, why this is not mentioned at all in Oscars article above!? Can you please comment @Oscar
This feature was introduced in Betalight 4.2 whereas I think this article and wiki it was based off at the time were referencing 4.1 where it was not a feature and it was instead recommended to manually switch GPS rescue mode via switch following failsafe. This is no longer required in 4.2 onwards with this new feature (called failsafe_stick_deflection in cli).
Hi Oscar, thanks for the helpful guides, I conformal coated my kakute f7 forgetting about the barometer, my altimeter now gives weird readings, if I setup gps rescue and the board will it have an effect?
You can disable Barometer in the “Configuration” tab, then altitude will be calculated from GPS data instead.
The blue light on the gps flashes, but the gps isn’t activated on the beta light, do you know why?
Hey oscar! Thanks for the step by step instructions. My drone’s gps rescue mode works perfectly but now i don’t know what happened. When i activate the gps rescue through a switch, the drone stumbles/stalls while turning. I did another test but this time the drone was already facing the home direction and when gps rescue activated, the drone Ascended and flew back home perfectly. May i know what causes the stall during yaw/turning?
Just the way it is right now, it has no way of knowing which direction it’s facing as it’s not using a compass, it can only work it out by flying forward and work it out that way that’s why it’s constantly adjusting its course.
Hi Oscar,
Can I have GPS rescue activate only on a switch? I want to leave my Failsafe set to Drop, but have the option to trigger GPS rescue manually. Do I have to set my Failsafe to GPS Rescue for it to work with the switch?
Hey Oscar, I just wanted to say thankyou for all your different how to pages ,, I dont know anyone else who flys ,, your pages helped me with alot of different issues
Hello,
I believe I have my Gps rescue set up, it locks on to the satellite’s, but in BF the modes page….I don’t get the gps rescue tab turning yellow when I activate the switch, the marker goes into the yellow range on the slider but the GPS Rescue tab on the left does not turn yellow.I did test the switch in the air 150 meters away, and the quad tumbled from the sky and I lost video as soon as switch flipped? Thanks@
Put “Flight Mode” in your OSD, in Rescue mode it should change from “Acro” to “Resc”.
Something else I found with beta flight. So instead on the Failsafe tab you can set the value of a switch so that it’s in the active mode. So setting RTH switch to 1800 will have it activate that if it comes within range but forgot to turn on the switch
I tried setting set gps_rescue_min_sats = 0 in betaflight 4.2 and the entry is invalid. The lowest you can put seems to be 5
if you want to take off without GPS fix, just do this in CLI:
set gps_rescue_allow_arming_without_fix = ON
Great information Oscar,
I already set up rescue mode in betaflight and assign 1 switch on my TX for rescue mode,
Should I set in failsafe in my transmitter as well?
in my TX there is Failsafe mode = not set / hold / custom / no pulses, last time I use custom set (position to arm, level, rescue mode) but it disarm after failsafe 2 seconds, should I just set it to NO PULSE?
Yes, although failsafe always gets triggered first in Betaflight and that’s all you need, just set it to No Pulse in your radio anyway.
Hi Oscar,
So I lost video, hit the switch for Rescue but wasn’t sure so hit throttle anyway, I fly in Acro always, and I did manage to get the quad back but noticed on the HD footage it was fighting my throttle inputs and possibly stick bumps. Curious if that somehow ruins the FC or it just keeps fighting my stick inputs and prolongs my return?
Hey Oscar I installed RDQ mini 8 gps on kakute f7 and when I set a switch and checked in modes tab gps rescue doesnt highlight when switched on. I know in flight it has to be 100 meters away but when testing on the bench I think the mode should highlight like all other switched modes. Any idea what’s going on?
Hi Oscar. I have set up gps rescue on my quad with the matek 405 std flight controller and all seems to be working well thanks to your great instructions. My only concern is, and bear in mind I have only tested this with the props off on a bench, I have assigned rescue mode to a spare switch on the radio, and when I flick it, sure enough, rescue shows on the goggles screen, my worry is that when I arm the quad on the bench near the window, if I then press the rescue mode switch, it cuts the quads motors, is this just because it hasn’t taken off and gone anywhere yet. Many thanks. Ian.
you are too close, it has to be at least certain distance from the launch location (set in the CLI commands)
hi oscar, thank you very mutch for the description. it works fine.
for eachine x220hv @4s it is very important to change the default values form this parameter to:
gps_rescue_throttle_hover = 1400
gps_rescue_throttle_min = 1250
otherwise the drone fly back in rescue-mode like a frog. the motor seams to stopp every second an then start again and so on. this because the default value (1280) is to low for hovering. also the …trotte_min ist too low. you have to determine this paramter for your own drone.
Great write-up Oscar! Thank you. I set mine up but when it reached 100m from home it shut-off motors and crashed. :( Any suggestions?
because you set distance to 100m? you should just take over control as soon as you have signal, it’s not designed to return to home like DJI drones.
Hi Oscar,
Bravo !!! This blog is great,
Pls Help I’m still confuse and had a question when GPS rescue set with the fail safe logic not using switch as per below,
set failsafe_procedure = GPS-RESCUE
save
I know it will happen “automatically” during e.g rx loss…, and after the rx signal back to normal what will happen with fail safe procedure? can I control back my quad or let it land? under authority of failsafe?
You will regain control as soon as signal is back. Please read the section “Using GPS_Rescue for Failsafe” again, it tells you how it works and how it should be setup.
I ask you a question, does the GPS on the drone help stabilize it, kind of like dji that when they are with connected satellites are stuck in a place?
I believe gps rescue only helps you get back your quad not stabilise it at least in betaflight
Te hago una consulta el gps en el dron lo ayuda a estabilizarlo, tipo casi como los dji que cuando estan con suficientes satelites conectados se quedan clavado en un lugar ?
Oscar question how would I have gps rescue on a switch and also have my Fail-Safe set to either work like normal no gps rescue and have gps rescue activate when wanted on the same switch? Just in case I have rx loss in a bad area I don’t want it to activate GPS rescue like a bando spot or low clearance area…so I wanna have the betaflight Fail-Safe to be setup with a switch but have two options for Fail-Safe on a switch and a sepy switch for gps rescue all by itself? Is this possible?
Hi Oscar,
Many thanks for sharing this…. Test the GPS rescue with switch and works great.
Pls advice which failsafe mode i should choose in TX? I am using Tarani Xlite with r9 lite module. Should i just put “no pulse” or make it “Custom” and than set to activate GPS Rescue switch.
Thanks before
it shouldn’t matter as long as you use SBUS or FPort, because it has a failsafe flag in the protocol to notify the FC, but setting it to no pulse is probably the safest.
This looks great, thanks for the report. I lost video above a river last weekend and almost lost the quad… Luckily video came back.
However, I am running a full KISS (V1) setup. Is it possible to setup such a system on a KISS quad?
Not unless KISS support GPS. You’d have to check with KISS customer service, I am not sure if this is possible.
Hello Oscar!
How i need to set my failsave in crossfire, should i set it to cut, and in betaflight to gps rescue? is this ok? i use betaflight 4.0, and rth on a switch works perfect.
Thanks for Help!
Yea sounds good to me.
To add some feedback, in case it helps others: Adjust `gps_rescue_angle` with caution!
The default GPS Rescue Mode variables tested correctly on my 7″ SuperG+ running Betaflight 3.5.7. I sometimes fly during moderate wind where 32 degrees of pitch is insufficient, so I increased `set gps_rescue_angle` from 32 to 40 degrees. During testing, however, gps_rescue_angle=40 consistently caused the quad to reach altitude, then descend towards 0 altitude as it headed towards home (well before reaching `gps_rescue_descent_distance`). The quad would have crashed into the ground had I not taken control. I tried 4S, 5S, and 6S batteries with the same results. Increasing `gps_rescue_throttle_max` from 1600 to 1800 did not help. This is odd, as the quad is well tuned and I have no problem maintaining altitude when flying at a 40+ degree pitch.
All is well with gps_rescue_angle=32. Hopefully it’s not too windy when I need a rescue!
@jerrod I have gps mode enabled. I know this because I can see my long and lat on my OSD. I can see how many gps satalights im locked into.
But when I go into modes there is no rescue mode. It’s as if my version doesn’t support it but I’m using 3.5.6 and every guide says 3.5+.
@Tdub – in your config tab you have to enable GPS mode. Almost exactly half way down the page, on the right column.
@Oscar – I think you might have it backwards. My gps return to home works the other way – up arrow is toward home, down arrow means you’re traveling away from home.
Thanks for the article Oscar!
That’s what i mean exactly.
I’ve set up a GPS module via an open port. I have it communicating, I can see my GPS stats on my OSD but when I go into “modes” I do not have a “GPS Rescue” option. I have “Beep GPS Satellite Count” but no rescue mode. How do I enable that mode?
Hi, I set my Cl Racing F4S board and HGLRC Neo-8M GPS up exactly the way you wrote. I made a simple flight
in the front yard. The quad was only about 5 feet off the ground and flew out about 35 feet, stopped, turned around but all of a sudden it went full throttle and shot up only to either I killed the motors or the motors quit and it fell to the pavement nose first. (miraculously there was no damage except the ice that it hit) I have no idea what caused that to happen.
Now when I got the quad in the air again I didn’t touch Rescue or anything and as the quad was hovering in front of me the motors suddenly quit and it fell to the ground. I was informed that maybe the quad is going into failsafe mode. The board is new as is the Rx, was a clean build and everything is working.
I now understand that Rescue if activated closer than 100m will kill the motors but what happens if you are coming back on Rescue will it kill the motors when it comes within the 100m?
https://www.youtube.com/watch?v=BWmHsctdpck&t=1s
Thank you, your information is very valuable to us.
Jim
Hi Oscar (or anyone else, that can help) Ive type in get gps in the cli and I dont have set gps_rescue_min_dth = 100. If I try to add it in it comes back with ###ERROR### Invalid name. Is there a clever way of adding this command into the B/F 3.5.1 thats on my G730L please? Im stumped :(
This command is for the future version of Betaflight 4.0 (still in Beta).
For current stable Betaflight 3.5.X, use this command instead:
set gps_rescue_min_descent_dist = 100
I have tried both commands and am getting the invalid name on both. I have betaflight 3.5.6 installed. Any other recommendations?
can you try “get gps_rescue_” and try find it?
Hi Oscar, one question to ask ,
If I set failsafe on my transmitter for quad to power down the motors and drop , and I was to set up gps RTH as failsafe also ,
Question, what failsafe will the quad take orders from ?
Will it drop or RTH?
Thank you Oscar I’m learning a lot for your blog
Very new to the hobby
look at these as layers… TX, RX and FC, these are all layers.
The closest layer to your motors is the FC, so the quad will react to the FC failsafe layer first.
This is assuming you are using SBUS or CRSF, where the RX will send a “Failsafe flag” to the FC.
home arrow in Betaflight OSD says wrong direction and when turn on rescue going away from me——-why
not enough satellites? Or GPS module is interfered by VTX? Try further separation.
Hello Oscar! I have a question and think may know now but want to MAKE SURE…For the first trial with the rescue mode has me puzzled but I think that may be clear now as well…. Okay first time I tried it, it seemed to start to work, it went straight up I guess the the altitude have set but then dropped from the sky?! Now I think that is prob due to I turned GPS Rescue back off then tried to turn it back on, and after reading your article that seems to make it drop??…I think? as well as I “may” have disarmed it and rearmed it to try to get the “failsafe” rescue to kick in and prob re-set the “home” location?! Alright I am about to try it again now after doing some adjusting, BUT MY BIG question is “Which way should the arrow point for home” down?? For if I remember correctly I did watch someones video on this after my failure, and I believe and PLEASE TELL ME, when arrow is pointing downward is that pointing to “home” for I just flew it and seems that was direction it was when I was some distance away, and in the video I watched I DID notice that when rescue is activated the arrow JUMPS STRAIGHT UP on it’s return, so I still am confused?!! So which way should the arrow be pointing when I have it away from me and should be pointing “home”?? PLEASE let me know for need to test it again, but I almost lost it the first time just got lucky finding it somewhat. Thanks I greatly appreciate it!
If the arrow points up in OSD, means it’s flying away from home. If it points down, it means the quad is facing home.
please could you help I have put gps on my quad tested it in my garden with props off so got 8 sats come up when I flicked the switch the motors go very fast ,my question is why should it do this when it is not 100 m away ,should it have gone into failsafe and cut the motors ,I have set all the cli commands as you have and am running 3.5.1
I think the arrow pointing is the other way around.
Hi Oscar, would you know why I can get Rescue mode to work faultlessly when I activate it with a switch but when I try to activate it with failsafe either with Failsafe set to a switch or by turning off the transmitter it just disarms.
Rescue mode only works when the quad is further than 100m away (or any distance you set), within this distance you quad will just drop/disarm.
If this is not the case then you need to play with Insanity-Check’s options.
When testing GPS Rescue, make sure you land and disarm between tests. This is because the rescue altitude is set to the highest altitude you reach during flight or the minimum setting number (whichever is greater, ie. the quad will never descend when rescue is activated, it will only ascend or maintain altitude). If you do multiple rescue tests without disarming, then the minimum altitude can stack higher and higher depending on how high you are flying and each test the quad will climb a little bit higher due to the altitude error stacking.
Thanks for explaination!
What will drone doing when he returns to home, will it land automatically and disarm? For example if i have problems with radio.
No, it will not land but drop. Make sure to regain control.
Does anyone know whether this is possible using a FRSky GPS module? I have a feeling it’s not, and that the FrSKy only connects to the FrSky receiver not directly to the flight controller.
Hello Oscar. Thank you for the wonderful post.
Hi Oscar. Thank you so so much for this information. I have a question based on the last section of your blog. If I set Gps rescue to failsafe and I experience failsafe and lose video at the same time. My quad starts heading back and it reconnects to my quad, but I am flying blind. U said set the switch to failsafe as well. How do I set both up, failsafe and switch if I can only chose one mode. Please advice. Thank you. I have learnt a lot.
Setup GPS Rescue mode on a switch, so when failsafe happens, you should also flip the GPS Rescue mode switch.
Good information Oscar. I installed mine a couple of weeks ago (mini ublox M8N) strictly for lost quad location. I went out to check it out but due to a FC malfunction my quad went wildly out of control before i had a chance to ‘test’ the install. Long story short, got my GPS coordinates from my DVR, plugged them into my smartphone and it got me within 50 feet of my quad. :) With out the GPS i probably would have been hours trying to find the quad.
that’s good to hear bro!
I have experience the “drone falling out of the sky” issue. My question is: Why would sanity check make the quad behave properly when it doesn’t do that by arming through a switch. Have you test that? I have sanity check off because of this reason as of right now.
it’s really a hit and miss issue at the moment with Sanity Check. Make sure you understand the risk of turning it off. Sometimes it’s better to lose your quad than damaging something or someone more important.
Hi Oscar ! there’s one important detail in:
set gps_rescue_initial_alt = 50
where 50 is Alt in meters. this value means Absolute alt or above takeoff ?
because in my place Absolute hight ( ground level ) is about 180 meters so if I write 50 meters my drone becomes a suicide machine )))
It’s the height from ground :) so setting that to 50 would be 230m in your cause
Hi Oscar,
non-failsafe scenario question:
is it possible to take back the control if the mode was activated previously w. a switch?
If I turn the mode off w. the switch within the minimum range (before the quad “lands”) it falls from the sky.
BF3.4
thanks,
WP
Yea if it was activated with a switch, you can put it back in acro mode anytime using that switch. What’s your Sanity setting?
Thanks for this post! My next build will probably be a 6inch for mid/long range with gps, so this tutorial it’s perfect
When I first tested this (less than descent distance) it just disarmed in flight.Does any modification beed to be made to the sanity checks tonprevent this?
You can try
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
or even OFF, but that’s not recommended according to the wiki.
You need to be beyond the minimum range of 100m, maybe its set as part of descent distance, not sure on that. The disarm I believe is a safety measure so the drone doesn’t fly autopilot straight into you being so close to its home coordinates. Personally I would like to see a safety check added that if it is activated by switch within the 100m range, it simply does nothing but beeps an alarm onscreen “proximity” or something instead of dropping out of the sky.
What happens if you set trottle to to high level? It flies away? That happened to me yesterday while testing failsafe…i had to struggle a lot to get it back as I did not cancel fiailsafe button soon enough hoping it will get back on its own…
So, i wonder what was the problem…i’am guessing trottle setting was set to too high level…