
If you’ve ever faced the frustrating issue of your FPV drone refusing to arm, you’re in the right place. I’m here to guide you through troubleshooting and fixing this problem, especially if your drone uses Betaflight firmware. By understanding what prevents a drone from arming and learning how to diagnose and fix these issues, you’ll be back in the air in no time.

New to Betaflight? No worries—here’s a tutorial to get you started on setting it up for the first time: https://oscarliang.com/betaflight-firmware-setup/
Table of Contents
The First Things to Check
Alright, let’s dive into the first steps to diagnose why your drone isn’t arming.
Unplugging USB Cable
Betaflight has a safety feature where your motors won’t spin up if the flight controller is connected to the configurator (you will get a MSP warning flag in the OSD and CLI when you attempt to arm). So, disconnect the USB and give it another go.
Moving Throttle Stick Down
The throttle stick needs to be move to its lowest position in order to arm. Betaflight doesn’t arm if your minimum throttle is too high (higher than the setting “Min_Check”). This is a safety feature so that the quad doesn’t suddenly spin up the motors and hurt you when it’s armed. You must ensure that your throttle is lower than min_check when it’s in the lowest stick position. Min_Check is 1050 by default.
Radio Receiver Check
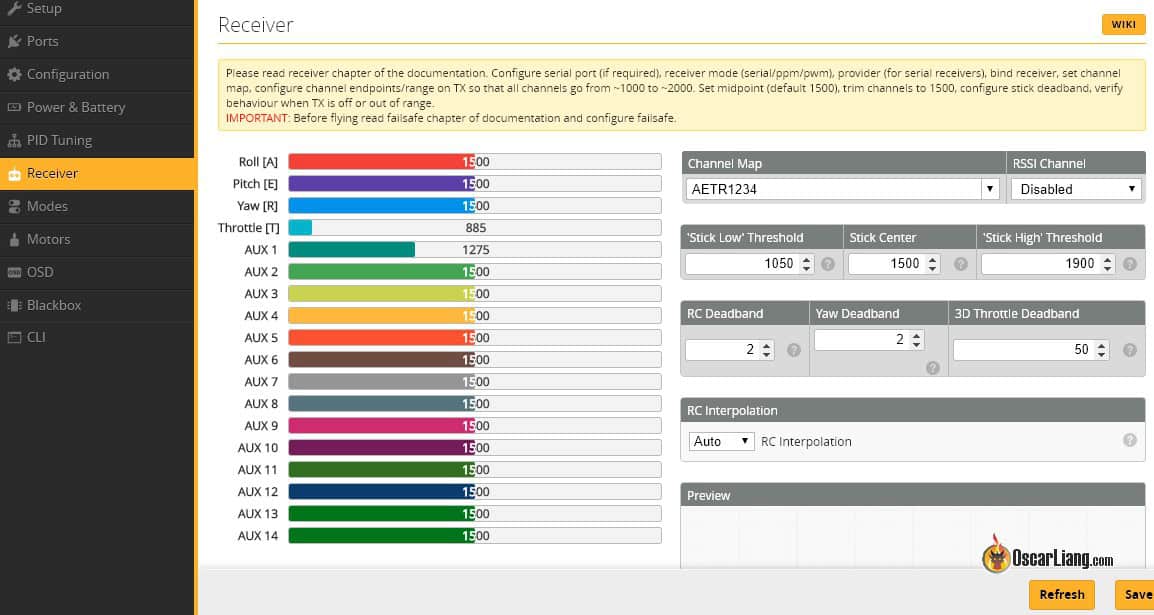
Ensure your radio receiver is bound and working correctly in Betaflight. Head over to the receiver tab to see if the channel responses match your stick movements correctly. Oh, and make sure you’ve got the latest Betaflight configurator downloaded: https://oscarliang.com/download-betaflight-configurator/.
Arm Mode Assignment
Did you assign a switch on your radio for ARM mode? It should light up yellow when activated, signaling everything’s set correctly. Not sure how to do that? See my tutorial on setting up Arm switch: https://oscarliang.com/betaflight-modes/#How-to-Setup-Arm-Switch
If you are using an ExpressLRS receiver, the ARM switch must be assigned to AUX 1 (channel 5)!

Still no luck? Let’s dig a bit deeper.
How to Check for Arming Issues in Betaflight
OSD
If you’ve got Betaflight OSD, enable “Warnings” on your screen with “Arming Disabled” selected. It’ll give you clue on what’s stopping the drone from arming.

You don’t have Betaflight OSD? There are other ways to check for the “Arming Disable Flag” in Betaflight, let me explain.
Betaflight Configurator
If you have access to a computer, you can easily check the Arming Disable Flag in the Setup Tab in the Betaflight configurator.

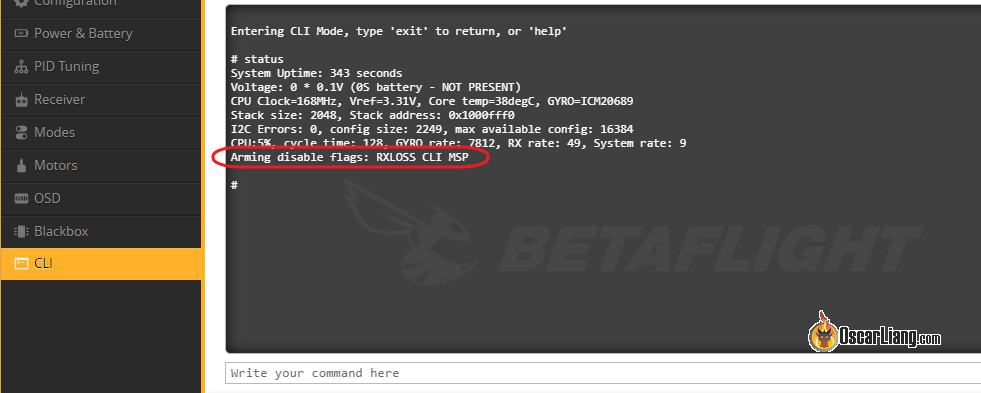
CLI
Alternatively, you can check in the CLI by entering the command “status”, the last line is the list of arming prevention flags.
Further Reading: How to use CLI in Betaflight?
Buzzer Beeping
If you don’t have a computer, but your quad has a buzzer, the beeping should also indicate the disarm flags. Here’s how to decipher the beeping pattern:
- Five short beeps for just attention, which can be ignored
- A number of long beeps
- A number of short beeps with long intervals
Each long beep represents 5, while each short beep represents 1. The final flag number can be calculated as 5 x <the number of long beeps> + <the number of short beeps>.
For example:
- 0 long beep and 2 short beeps = 2
- 1 long beep and 3 short beeps = 8
- 2 long beeps + 0 short beeps = 10
Arming Prevention Flags Lookup Table
Once you’ve found the arming disabled flag numbers or names, match them with this handy table to decode the issue. The info is from the Betaflight wiki.
| Name | Description | Beep code | Required Actions |
| NOGYRO | A gyro was not detected | 1 | You may have a hardware failure, if a previous firmware version works then it may be a firmware issue. Or you might have flashed a wrong target. |
| FAILSAFE | Failsafe is active | 2 | Rectify the failure condition and try again. |
| RXLOSS(1) or RX_FAILSAFE | No valid receiver signal is detected | 3 | Your receiver is either faulty or has no link to the transmitter. |
| BADRX(1) | Your receiver has just recovered from receiver failsafe but the arm switch is on | 4 | Switch the arm switch off. |
| BOXFAILSAFE | The ‘FAILSAFE’ switch was activated | 5 | See FAILSAFE |
| RUNAWAY | Runway Takeoff Prevention has been triggered | 6 | Disarm to clear this condition. |
| CRASH | Crash Recovery has been triggered | 7 | Disarm to clear this condition. |
| THROTTLE | Throttle channel is too high | 8 | Lower throttle below min_check. |
| ANGLE | Craft is not level (enough) | 9 | Level craft to within small_angle degrees (default 25). |
| BOOTGRACE | Arming too soon after power on | 10 | Wait until pwr_on_arm_grace seconds (default 5) have elapsed. |
| NOPREARM | Prearm switch is not activated or prearm has not been toggled after disarm | 11 | Toggle the prearm switch. |
| LOAD | System load is too high for safe flight | 12 | Revisit configuration and disable features. |
| CALIB | Sensor calibration is still ongoing | 13 | Wait for sensor calibration to complete. |
| CLI | CLI is active | 14 | Exit the CLI. |
| CMS | CMS (config menu) is Active – over OSD or other display | 15 | Exit the CMS (or OSD menu). |
| OSD | OSD menu is active | Exit OSD menu. | |
| BST | A Black Sheep Telemetry device (TBS Core Pro for example) disarmed and is preventing arming | 16 | Refer to the manual for your hardware. |
| MSP | MSP connection is active, probably via Betaflight Configurator | 17 | Terminate the Betaflight Configurator connection (disconnect). |
| PARALYZE | Paralyze mode has been activated | 18 | Power cycle/reset FC board. |
| GPS | GPS rescue mode is configured but required number of satellites has not been fixed | 19 | Wait for GPS fix, enable arming without GPS fix, or disable GPS rescue mode. |
| RECOVERY | (wiki incomplete) | (wiki incomplete) | (wiki incomplete) |
| RESCUE_SW | GPS Rescue switch is in an unsafe position | 20 | Turn off the GPS Rescue switch to arm. |
| RPMFILTER(2) | Motor RPM-based filtering is not functioning | 21 | One or more ESC’s are not supplying valid RPM telemetry. |
| REBOOT_REQD | Reboot required | 22 | Reboot the flight controller for settings changes to take effect. |
| DSHOT_BBANG | DSHOT Bitbang is not working | 23 | (3) |
| NO_ACC_CAL | Accelerometer calibration required | 24 | Calibrate the accelerometer or disable features that use it |
| MOTOR_PROTO | ESC/Motor Protocol not configured | 25 | Select the ESC/Motor protocol to use on the Configuration tab. |
| ARMSWITCH | Arm switch is in an unsafe position | 26 | Toggle the arm switch to arm. |
Other Common Issues
If Betaflight shows no arming disabled flags, the problem might be something else. Here are a few more things to check:
Accelerometer Issues
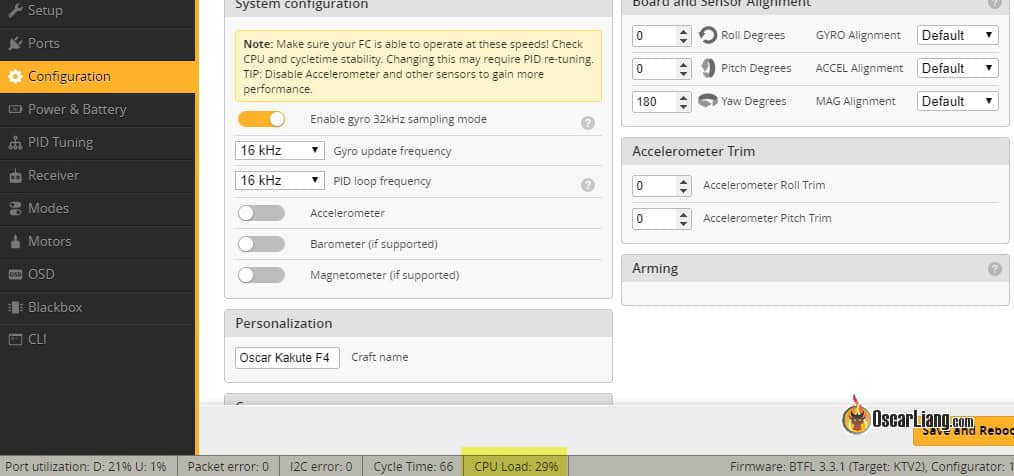
If the Maximum Arm Angle in Configuration tab is set below 180 (default value 25), your quad must be under this angle in order to arm. In that case, ensure your quad is on a level surface, and calibrate the ACC on a level surface.
If you wish to be able to arm the drone regardless the angle it’s in, you can disable Maximum Arm Angle by entering 180. Some people prefer to do this as it allows them to arm the quad when they are stuck in trees and they might be able to shake it out. But obviously this could be a safety concern, so do this at your own risk.
A faulty accelerometer could also contribute to the issue, try disabling accelerometer in the Configuration tab if you don’t normally fly in Angle/Horizon/Rescue modes.
CPU Usage
When CPU load is too high, Betaflight will refuse to arm. You can find out the CPU load at the bottom of Betaflight Configurator.
Keep the CPU load below 80% (since BF4.3) by adjusting settings, such as lowering PID loop frequency, and disabling unnecessary features such as LED and soft serial.
Throttle End Points
Ensure your throttle is correctly calibrated. When your throttle’s lowest value is higher than it should be, Betaflight will refuse to arm. Ideally the range of the channels should be 1000 to 2000. If the end points are slightly beyond this range, it’s usually fine and doesn’t do any harm, e.g. 988/990 – 2010-2012 is fine. If your end point is above 1000 and below 2000, that’s BAD, and you definitely want to calibrate your radio endpoints.
Moron threshold
Some FC might have more sensitive gyro’s and the drone would refuse to calibrate and initialize after power up, and therefore you can’t arm it. By increase “gyro_calib_noise_limit” (originally known as Moron Threshold) in CLI can reduce gyro sensitivity during initialization. Try setting it to 100 or even 120.
Conclusion
I hope you found this guide helpful! Let me know in the comment if your arming problem was caused by something else that wasn’t covered in this tutorial. If you are still having problems arming your quad after following this guide, please post your question on our forum, our community is always here to support and learn together. Happy flying!
Edit History
- Jun 2018 – Tutorial created.
- Feb 2024 – Updated.
75 comments
I have loaded the firmware and corresponding CLI file. When I connect a battery I hear the normal beeps but also a continuous beep. In betaflight receiver tab I see the drone spinning around the roll Axis. Can it be that my CLI file is not correct?
Maybe you are using the wrong channel map? https://oscarliang.com/channel-map/#:~:text=How%20to%20Fix%20Wrong%20Channel,%E2%80%9CSpektrum%20%2F%20Graupner%20%2F%20JR%E2%80%9C
Hello! I’m having trouble figuring out why my motors aren’t working. I built the drone tested a battery and then updated all the firmware. Betaflight is working properly, modes are fine, no arming flags. When I try and use the motor tab to spin up nothing happens. Which is strange because when I plug a battery in the esc rings and the motors do their little dance. What could my problem be? I would really appreciate the help I’m running out of ideas. Thanks!
If you hear the ESC beeps when you plug in the battery, but they don’t spin in Betaflight Motor tab, chances are the FC isn’t talking to the ESC – maybe the cable isn’t attached properly or the connector is damaged. Double check that.
Hello, i am having issues with my motors running or arming. All seems to be good in the modes and receiver tabs, but cant spin up motors in BF with battery connected, or arm when not connected to BF. I was flying in the evening, went home and updated my firmware and cant arm anymore. Not getting any arm failsafes either. Any suggestions are much appreciated, thanks.
If you can’t spin the motors in Betaflight, possible issues are:
– the connection between FC and ESC is bad, maybe bad connector or bad cable?
– dead ESC
Do you hear the ESC/motor beep when you plug in the battery? If not, then it’s quite possible this is the case.
Since 4.5 my betaflight shows DSHOT_TELEM
My Motor dont Arm because Motor Protocoll.
But i Selectet everything a can seletc but nothing work
Hi everyone,
trying to get my Cinelog 25 V2 (O3 version) up and running. Everything seems ok, I can run the motors through betaflight configurator, motor protocol assigned (Dshot 300). However, when flicking the arm switch, an error code “motor protocol” comes up in betaflight (next to the obvious MSP). Unplugging from betaflight, same issue, won’t arm.
Any ideas, I am at loss….
In addition, when arming, OSD disappears in goggles, any ideas what I am doing wrong?
Thanks in advance,
Chris
Same problem. Can’t arm because Betaflight says “MOTOR_PROTOCOL”. But I set the good motor protocol in motor tab !!!!
Same exact issue. everything was working fine on the drone and plugged it into beating hot today and gave me this error.
sir im very firstime build my fpv quad.7inches.i tried betaflight newest version im connected all need for connection my tx is fly sky.sbus.what can i do.i cant cant arm.recently i can armed but the motor is run alway.how to configure sir..
Dear Sir/Madam
I am having trouble getting my drones to work, I have bound all of my receivers, set failsafes, I have fixed any CLI flag reports in beta flight, motors spin in BetaFlight, values go up and down in “receiver” tab in BetaFlight when I move the sticks. I have set up throttle cut on sf switch, which works in BetaFlight (or doesn’t for the throttle when deactivated) when I move the sticks on the receiver. However, all the drones won’t respond when trying to fly.
This happens with the TBS Sixty9 attached to the Kopis2 even though there are both solid green lights on the TBS Transmitter module and the Sixty9 receiver. The same happens with the TBS Transmitter module and the TBS CrossFire Nano receiver attached to my Darwin BabyApe 2, both have solid green lights, seems to be working in BetaFlight, but not a sausage in real life. So I tried using my Archer ACCESS GR8 receiver, however, first I plugged in a power supply so that I could bind it. Bound fine with solid green light and the receiver recognised in the X20s. However when plugging into the BabyApe’s flight controller, no lights on the GR8.
The TBS Nano Transmitter wont fit into the lite bay on the back properly. I have to push it down hard to make connection with the pins. I am thinking of creating some pins and sockets to fix this in permanently with the spare shell that comes with the TBS Crossfire.
All the kit is new, I have:
FrSky X20s Transmitter
GR8 Access Receiver
TBS Crossfire Nano Transmitter TX
Darwin Baby Ape 2
With TBS Crossfire Nano RX
Holybro Kopis 2 5″
With TBS Sixty9 RX/VTX
What am I doing wrong? is there an arming switch that I don’t know about?
I’ve noticed if there’s a model mismatch also on ELRS you got the no valid receiver signal.
I checked everything above, no arm flags, my min throttle is 995, my gyro calib noise is 100. Still can’t arm my quad. The blinking green light on the fc goes solid when armed, but motors don’t turn. Not sure where to go from here, please help!
do the motors turn using the sliders in the Motors tab in Betaflight Configurator?
Hello Oscar and others,
I am not sure if someone else came across this strange behaviour.
I am using a BetaFpv 1s 12A AIO with SPI ELRS and as soon as I connect the FC to BF I calibrate the accelerometer, after calibration, the 3D model in BF shows the drone jittering like it got fits and the axis numbers flicker very fast between -00 to -0.06 degrees and this prevents the quad from arming. I disconnected the VTX and the motors to see if the problem came from one of these attached parts, but seems to be same. The calibration cannot complete because of these jitters. :(
Any clue how to solve this ?
Will the Moron threshold help?
After very long time stumbled upon THROTTLE flag again when converted nephew’s Mobula7 whoop from FrSky SPI RX to ELRS EP1 RX. Turned out that Betaflght 4.4.2 by defauly doesn’t accept T-Lite v1 transmitter stick outputs (990-2012) for throttle minimum. Fixed that by setting “set min_check = 995 save” directly in CLI.
hello. I just bought a betafpv paco pivo with a DJI 3 air unit. installed the latest Betaflight. I can bind the drone to DJI Goggles v2, DJI controller 2 and the O3 air unit. connected the drone to Betaflight but the controller isn’t responding to Betaflight. I have followed the instructions given from betafpv on YouTube, what could go wrong ?
I don’t have the DJI controller 2 so I can’t tell you the exact steps to set it up, but I can give you direction to the solution.
Firstly, make sure the HDL pin is connected to one of the RX pad on your flight controller (see O3 pinout diagram here: https://oscarliang.com/dji-o3-air-unit-fpv-goggles-2/#Connection-O3-to-FC). The HDL pin is the SBUS output of the DJI O3, it’s the receiver signal to the FC.
If that’s connected, but you have no response in Betaflight, chances are receiver isn’t configured properly in Betaflight. You can see how I configure DJI SBUS here (it’s for the original DJI system, but the configuration should be similar if not the same): https://oscarliang.com/dji-fpv-system-setup/#Using-DJI-Remote-Controller
I have a very interesting behavior: When I power the flight board via USB, RX is fine and I can see the stick movements in Betaflight. However, when I plug in the battery I immediately see the warning “RXLOSS” and also no more stick movements are displayed in Betaflight. As soon as I unplug the battery, the “RXLOSS” warning disappears and I can see the stick movements in Betaflight again as well. I have no clue what the issue for that might be. Do you have any idea? I am using a Futaba R3001SB Receiver.
Short Update: I did some further testing and it looks like the issue is somewhere in the Betaflight configuration, respectively the flight controller (I am using the SpeedyBee F7 V3). The problem mainly is that as soon as I power up my DJI O3 Air Unit, the flight controller reports “RXLOSS” in the “Arming disable flags”, while everything is fine when the DJI O3 is not running, which is the case when the flight controller is only powered via USB and not via the battery. However, it is not that the connection between radio and receiver is lost, it is more that something is wrong with the connection between receiver and flight controller. I tested it with FASSTest too and observed there the same problem as well. Probably I misconfigured the flight controller. Do you have any ideas what the misconfiguration might be?
Hi Thomas, did you manage to fix this issue? I’m having the exact same problem, with the exact same setup.
Many thanks,
Pepijn
I’m getting pretty much the same issue with SpeedyBee F405 V3 stack, HappyModel EP1 and a Caddx Vista. Works perfectly via usb, stick inputs are showing in reciever tab but as soon as I power up with a battery and check via the SpeedyBee app via Bluetooth it’s showing the RXLOSS warning. Tried another EP1 that I have and the same issue. Funnily enough it doesn’t do it with a BetaFPV SuperD. So I’m a bit confused why there is a uart conflict with the EP1s
I had the same issue come to find out that you can only use betaflight 4.3.1 any other and the speedy bee FC will not see the RX on the 03 unit.
Check if you have any other things connected to the same UART as the receiver? And if the 5V pad does output 5V when you plug in the battery with a multimeter? Maybe try a different UART?
I’ve actually solved the issue with my HappyModel EP1 working in BetaFlight but as soon as a battery is connected them having an RX_LOSS warning. Figured it out partially from this thread and another forum that mentions removing the SBUS and associated GND wires from the air units. This was what was causing a conflict with communication between the RX and the FC
I just got a rekon35 and a Expresslrs Jumper t-pro trans… I then ordered a HappyModel ep2 elrs receiver. I hooked everything up, Did the binding and firmware update. Bars on trans shows that I’m getting signal but light still flashes on receiver. Went to betaflight and getting ARM Disabled message. Looking over you web page on how to fix and not working for me, Can You help???
What’s the arming disabled flag? How to check: https://oscarliang.com/quad-arming-issue-fix/#CLI
Hey Oscar,
I keep getting the arm switch in unsafe position error. I toggle the arm switch and nothing. If I go into turtle mode and arm turtle mode works. If I reflash Betaflight it works for a bit, but then I plug the quad in an hour later and get the error again. Any idea what could be happening?
Thanks.
I am using a tango 2 pro, crossfire nano and speedy bee f7 v3
Probably means your quad is on an unlevel surface when taking off.
Go to configuration in Betaflight, Find “Arming”, and set the angle to a higher value.
Normally I set it to 180 degree personally. By setting arming angle to 180 effectively disables this feature, and so it allows you to arm the quad regardless what position the drone is in (even upside down). This is useful when you get stuck in a tree, you can still arm the quad, run the motors and get it out of the branches. If this is set too low you might not be able to arm it. By disabling the Accelerometer will also turn off this feature. More info: https://oscarliang.com/betaflight-firmware-setup/#Configuration
Hi Oscar, I had Flywoo Baby Nano FR 1s Elrs and it binds to my Radio Master TX16S but have no telemetry stick response nor arming. I have tried everything (re-flashed firmware CLI scrape from Flywoo etc.) and the only activity of stick movement is if I change to SBUS in the receiver tab in beta flight but the telemetry is sporadic…
Did you bind it to the 4in1 multiprotocol module in your TX16S?
Are you sure you bought the Baby Nano with ExpressLRS receiver or the Frsky version? It’s odd because you got SBUS working and not ExpressLRS.
Hi Oscar, I had Flywoo Nano FR 1s Elrs, already updated to V3 version on expresslrs configuration. Had conneted to Radio master Boxer Elrs, but when I turned the Arm switch, all the motor’s didn’t spin ? Would you please help me
Thank you
Once again you helped me figure it out, looked at the set up page and it said throttle setting too high. 10 min fix.
Thanks again
I got rx_failsafe flag and I have no idea what to do, please help
Is your radio working?
have you checked in receiver tab? https://oscarliang.com/betaflight-firmware-setup/#receiver
I recently started having issues with the scroll wheel on my jumper t16. I reseated the ribbon cable, updated the firmware. I went to test a pack outside to make sure things were 100% and my drone wouldnt disarm. I had to have it pinned upside down and run the battery out until it shut off. I plugged it back into betaflight (Props off of course) and checked for anything that seemed off. Everything is as it was before I had radio issues. Any clue as to why this happened?
Hello, Your article helped me when i couldn’t arm due to not enough satellites for GPS lock. Thank You for that. But i have a different arming issue this time and it seems it has nothing to do with arming prevention flags. I’ve flown with my quad for about four minutes no problem. Then i landed (gently no crash) and since then i couldn’t arm again.
Every time i try to arm, quad beeps three long beeps and thats it (no 5 short attention beeps). There is no arming prevention flag in betaflight configurator.
Since then i narrowed it down to ESC problem, because motors don’t spin even in betaflight configurator (with battery connected). Also when i plug the battery a get only first three beeps of that classical startup sound. Last two beeps “arming sequence” are missing.
I have no idea how to proceed now. Have anyone experienced this before and has some solution please?
Hello,
I can’t arm.
You write:
“Radio receiver is bound and working correctly in Betaflight. Check in the receiver tab if the channels are responding to sticks movement in the correct order and direction (download the latest betaflight configurator)”
That’s ok for me
“Check if you have assigned a switch on your radio for ARM mode, and if it can be activated by that switch.”
That’s ok for me
” The arm mode should turn yellow when activated, indicating that the switch is working”
That’s not ok for me. What it means if the arm mode does’nt turn yellow (it turns red)? Where does the problem come from?
I accidentally put my xjb-145 into bootloader mode , now it does nothing , how do I fix that
Hi my quad isnt arming, the motors dont spin but i get a response from the motor tab and i get input on the receiver tab when im moving the sticks but it doesnt spin the motors and only one motor just twitches and nothing else happens . I typed in status and there werent any flags. Do you know what the problem might be? All my end points are fine oh and i am not getting all 5 blheli beeps but i am set om the correct motor protocol
I’m using a i bus fly sky receiver and a blheli S 45a i flight esc with a mamba f405 FC the FC does power up and all my motors work the are all healthy i tested them.
I am hoping this isnt already gone over and over, but I am truly stuck and like others about to give up. I have a tiny whoop, dx6 g3 TX, the only arming disable flag I have is arm_switch. I have gone through all the settings in the TX and the modes in beta are setup right as it shows arm and failsafe setup properly. When I do flip the arm switch in mode tab, it shows ARM but red because it is (disabled). My arm switch and failsafe are the same switch in different positions. I have checked all the normal stuff and that is all good (min_check, throttle position, accelerometer). I am thinking it is a setup in my TX but I cant find it. I turned off motor cut as well no change
Im currently having trouble getting what’s now two tinyhawk 2 freestyle’s to fully start up after plugging both batteries in. Only half of the tune that plays during initial setup is played. Therefore when i attempt to connect either quad up to betaflight, no connection takes place.
Now this is after both of these quads fell from the sky and hit the ground,(roof & a yard, not the concrete either) and now as a result, i believe i may have damaged both of the flight controller’s on each quad. Im sure this is a common sense issue, but i am sure im overthinking the situation and being very optimistic lol. Thank you if th you could help!
FIX Update: Looks like the initial fix I posted was a fluke. It just worked intermittently when I changed that setting 3 times in a row. But after I posted this, the 4th time wasn’t a charm. However, I now can say with confidence that the new discovery may be the smoking gun. I had a R9 MM-OTA Rx installed ono the Tx2/Rx2 pads, but because I can’t seem to pair it I’ve been using the stock TinyHawk Freestyle 2 SPI Rx. After de-soldering the R9 MM, it works like a champ now…famous last words ;)
FIX: I was struggling to try to get my TinyHawk Freestyle 2 to ARM and all Flags in BetaFlight were showing no problems (besides MSP which is normal when checking other flags via BF). The one thing that solved my arming issue was in BetaFlight, go to the OSD section and disable (uncheck) the Warnings ‘Arming Disabled’. So excited to fly now, unfortunately, this took 2 hours to figure out and now it’s dark out SMH…
Hi, currently i’m getting “Rx_failsafe MSP” on the arming info, and getting the red arming disarm. I got a BNF DC3 from iflight and using DJI goggle and remote. I’m certain iflight would have it tested already so it just the matter of setting issue. I got my stick movement corresponding, not sure why?? One thing i noticed is under the Port tab, my UART1 Serial Rx is ON and my UART2 Configuration/MSP is ON, is this normal?? Also my Dji goggle i have to set it to CH1 in order to work, do you have a tutorial for DJI goggle channels??
Much appreciated for any guidance, thanks.
I don’t have this quad, so not sure how it’s setup exactly.
You can post some photos of the setup in our forum, IntoFPV.com, but we need more detail like how everything is connected together. Also we need to know what radio/protocol you are using to control the drone.
Or you can maybe contact iFlight customer support see if they can resolve this for you quicker.
I have connected my FrSky R-XSR receiver and enabled serial RX for the UART I used. I also set the Smart Port resource to TX1 and enabled that in the SoftSerial part of the ports tab. However, my receiver tab will not respond with my transmitters actions. Its stuck with all of the stick and aux values (that I have set) at the lowest point, just like in the first picture in this article. Any Idea what to do?
How to Setup SBus, SmartPort Telemetry
I’m giving up on drones they just to complicated to set up why cant they come ready to go as a newb it’s just so off putting it’s a shame I love fpv
Blog needs updating:
Beep codes have changed from BF 4.0 onwards.
github.com/betaflight/betaflight/wiki/Arming-Sequence-&-Safety
Thank you, I’ve added this to my to-do list.
I am new to mini quads and I would like your help with the following situation. My Trashcan worked normally with my Taranis QX7, and for no apparent reason no longer arm. The Trashcan and the radio bind, but don’t arm and there’s no reaction from the sticks on the Betaflight receiver tab. Only thing I did after last Trashcan flight was to add a DSM plane to the IRX4 + external module that is installed on Taranis. The Status command via CLI displays RXLOSS.
Hello
My drone won’t arm.
In my osd i get a warning hsp.
can sombody tell me what that means?
Gr Daan
Hi my quad isnt arming, I can spin the motors from the motor tab and i get input on the receiver tab when im moving the sticks but it doesnt spin the motors. I typed in status and there werent any flags. Do you know what the problem might be?
Im using a ppm receiver (CM703) and pwm ESC’s.
Thanks,
Hessel.
Hey FPV Friends,
after updating my Tbs Vendetta v1 to betaflight 4.0 i have a solid red led instead of the quad arming up. I checked and calibrated everything, i have a low cpu load… no beep codes at all (at least not anymore – see above ;-), no blinking, nothing.
It just won´t arm.
Maybe somebody has a suggestion for me :-)
Thx, Chris
What arming disable flags are you getting?
Can you try flash an older version of BF see if that works?
If this works, but not Betaflight 4.0, you should check with TBS.
Hi, thanks for this great tutorial. I’ve just built my first quad and set up the arming switch to aux 1 after following your guide. Betaflight shows the switch transitioning and the yellow indicator moving into the yellow band. However my quad does not arm. In my goggles OSD, the warning THROTTLE appears when moving aux 1 to arm. My throttle is in the minimum position already and i have also tried trimming fully back which makes no difference. Can you please let me know what the possible problem could be?
Thanks
1. At throttle’s lowest stick position, what value does it tell you in the receiver tab? Ideally it should be lower than 1000, e.g. 998, or 999
2. Make sure your Min_check is at 1050, your lowest throttle has to be lower than this value in order to arm.
Is the only way to know for sure if the flight board is toast is trial and error? I know that’s probably the last thing people hope it is , is that why people just don’t check that first or is there no direct way to check just the flight boards status? Sorry if this question is stupid, I’m a newb
It’s going to be too long a topics to cover in a blog comment, i will have to write a post for that in the future.
@Ash
It’s been a while and you should’ve (hopefully) resolved the issue by now. Just throwing this out in case it might be useful to someone else.
When I had the issue of the gimbals not responding in Betaflight, it was the Failsafe mode which I accidentally enabled on my transmitter. I could see all AUX input channels responding except those of the gimbals or of the ARM switch. Flipping the switch to disable Failsafe had everything working normally again.
Hello i just got a GEPRC Mark2 PNP quad. I plugged in my receiver which is for an Radiolink AT9, but as soon as i turn on my remote, the quad beeps constantly of short beeps. My OSD said “BADRX”, but the reciever works on my other quads just fine.
Receiver is probably not setup correctly.
I have no experience with Radiolink, please join up our forum and see if you can get help from our other members? http://www.intofpv.com
i have same issue try to check every point on the list. I have a flysky turnigy evolution . had tried spektrum dx8 then go for taranis x-lite but always came back to flysky t . . .
so i have also full controll and solid signal when i connect and whatsch the recivertap.
but radio’s endpoints says avery channel 100% . have no more ideas
Thanks for your detailed tips,it should had helped me and people just involved in,but I tried everything even googled lots of vids but still unable to make arm activated in Beta Flight configurator, however flip fail safe and fly mode switch work fine and beep, if I check all the tips,what else would I missed?
Please join our forum for troubleshooting: IntoFPV.com
I just started running TBS CROSSFIRE on my kwad. I was running FrSky R-XSR rx for months and no problems arming at att! Today December 9th is my first time flying crossfire module with the nano rx. My fc is the pyro F4OSD running betaflight RC3.5??? I think? Anyway, the kwad willarm once and if i disarm I get the “PARALYZE” flag? Can someone help me out with this one??
that’s a betaflight feature used for racing. Check your BF settings. Make sure you don’t have a mode enabled for Paralyze on accident
Hello,
I’ve just updated to the latest versions of betaflight (3.4 & configurator 10.3.1) everything works great, new PIDs and turtule mode are awsome.
The thing is it only seems to have Air mode, I can’t find neither angle nor horizon mode, where are they ?
Please help me.
Ed.
maybe you’v disabled accelerometer?
Was flying fine for days, had rough landing, wouldn’t arm after this, plugged into betaflight only to find not getting any response to the sticks/switches in the receiver tab. But Taranis xd9 tells me telemetry gained / lost when I power on or off. So it’s bound to receiver, some sort of communication but no sticks input.. spent a fair few hours trying to trouble shoot before asking here. Could be a wrecked Flight Controller board and I have ordered a new one today. (Using DYS F4 Pro v2). But more worried my Taranis xd9 broke somehow :(
My beeper is not very clear/loud but think its telling me error number 3. Beta flight says “arming disable flags: 3,17 And CLI “status” says RXLOSS (and the typical CLI and MSP).
Summary of what I’ve done so far:
checked wiring thoroughly, visual and with multimeter including the header plugs and inspected for bent pins etc.. re-soldered the receiver wires to fc board and re checked with multi-meter. No change.
2. Open brand new R-XSR receiver, bound it and plugged into the freshly soldered wires, successful binding but: – No change
3. I think every other troubleshooting option I’ve found on this page and on many vids (JB youtube for example), are to solve a problem that does not including having no stick response in betaflight – I still tried most of them – good learning experience
Any tips or suggestions welcomed! My next step is to de-solder all wires then re-solder wires to new FC when it arrives in a day or 2. If no go then it’s to order a new Transmitter (Taranis) and kinda hoping not to do that ><
Thanks again!
The very first thing on the page is to check your stick inputs in Betaflight :)
Check if SBUS is setup properly?
Another I’d try is to backup and then reset all the settings, and start from scratch, could just be a configuration issue.