In this tutorial, I will explain how to enable Blackbox logging in Betaflight, the recommended logging settings, how to use Blackbox Explorer, and show examples of how to interpret key graphs for basic tuning and troubleshooting on a Betaflight FPV drone.
Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information.
Table of Contents
What Is Betaflight Blackbox?
Blackbox is a flight-data recording feature in Betaflight. A Blackbox log captures essential information such as:
Stick inputs
Gyro measurements
PID controller responses
Motor outputs
And much more
By replaying a flight log, you can analyze whether your quad is behaving as expected—whether it tracks your stick commands correctly, overshoots, lags, or hits motor limits.
It’s an extremely powerful tool for evaluating and tuning FPV drone performance, as well as diagnosing issues.
While blackbox is very helpful for tuning, it’s not mandatory. You can still tune a quad without Blackbox, as explained in this tutorial: https://oscarliang.com/fpv-drone-tuning/
To record Blackbox logs, your flight controller must have either:
A built-in flash memory chip
or, an SD card slot
If it has neither, you can connect an external logger (covered later).
Flash Memory Chip
In the image example, the chip labeled “Winbond” is a 16MB flash memory chip dedicated to Blackbox logging.
Most modern flight controllers include a flash chip by default. A 16MB chip typically stores 5–10 minutes of flight data depending on your logging rate. This is sufficient for general tuning and troubleshooting—you’ll just need to emptying logs between flights to avoid running out of space.
In Betaflight Configurator, the top bar displays how much memory space is available:
SD Card Slot
If Betaflight says “no data chip found”, your FC likely has an SD card slot, as shown in the image below.
An SD card gives you virtually unlimited logging space. A 4GB card can easily last a full year of flying without emptying it.
However:
Use a card with high write speed, or you may experience missing/corrupted log data.
Go to the Blackbox tab in Betaflight Configurator, and select the appropriate logging device:
Onboard Flash → if your FC has a built-in flash memory chip
SD Card → if your FC has a micro SD card slot
1. Logging Rate
Select 2 kHz.
1 kHz is enough for general PID tuning.
2 kHz (or 1.6 kHz for BMI270 gyro) is recommended for filter tuning and noise analysis, because it allows you to observe vibrations up to 1 kHz.
For convenience, I normally leave it at 2 kHz, but if you want to save file space, you may choose a lower rate.
2. Logged Fields
Disable unnecessary data fields to reduce log size. These are rarely needed for tuning:
Accelerometer
Attitude
RSSI
Altitude
Magnetometer
Battery
GPS
Servo
3. Debug Mode
If you want to save space or keep the logs simple, set Debug Mode = NONE and uncheck debug logging.
If you want deeper insight, set Debug Mode = FFT_FREQ. This records the frequencies where Betaflight’s dynamic notch filters are locking onto frame vibrations—useful when working with advanced tools like PIDToolbox.
Click Save and Reboot.
On the same page, you can also see how much logging space is available. Try to erase logs before each flying session; once storage is full, Blackbox will stop recording.
How to Record Blackbox Logs
By default, Blackbox will automatically:
Start recording the moment you arm the quad
Stop recording when you disarm or when memory becomes full
If you prefer manual control, assign Blackbox to a switch in the Modes tab.
Saving Blackbox Logs
Connect your drone to Betaflight Configurator.
Go to the Blackbox tab.
Click Activate Mass Storage Device Mode.
Your FC will appear as an external drive on your computer. Simply browse to the drive and copy the .bbl files onto your computer.
This method is much faster than using “Save flash to file…”.
You may see multiple log files. The last file, btfl_all.bbl, contains all logs combined. If you already know which log you want, you can safely ignore this file.
Pro Tip: How Log Files Are Created
Onboard flash memory: Logs are stored in a single file until you power cycle the quad. Only rebooting the FC and power-cycling creates a new log file. If you arm/disarm several times during the same battery, the log file will contain multiple sub-logs, accessible in Blackbox Explorer using the dropdown list at the top right.
SD Card: Each time Blackbox is activated (e.g., disarm → arm), a new log file is created—even without power cycling.
Download Blackbox Explorer
Blackbox Explorer is the software used to view Blackbox logs.
Click “Open Log File” and locate the Blackbox .bbl file you want to open.
Click the Info icon (“View Log Header”) in the top-left corner. This displays the Betaflight configuration of the drone during that flight — extremely helpful when comparing logs or confirming PID/filter settings.
Top-Left: Drone Attitude & Motor Outputs
A small drone model shows:
Current attitude (roll, pitch, yaw)
Real-time motor outputs
Top-Right: Transmitter Stick Inputs
The top-right shows your stick commands during the flight.
Right Column: Trace Selection
This is where you choose which graphs or signals to display:
Pitch
Roll
Yaw
Motors
RC Commands
And many others
You can toggle individual traces or entire trace groups.
At the bottom, there are graph options:
Expo: to see traces with a bit higher fidelity.
Smoothing: to get rid of excessive vibration in the traces if you just interested in the average trend of the traces.
Below Graph: Timeline
Below the graph is the timeline, which also displays throttle position throughout the flight.
Keyboard Shortcuts
Click the question mark icon (top-right) to view all available shortcuts.
The most useful shortcuts are:
Log Section Isolation
I → set “in” point
O → set “out” point
Great for trimming away takeoff/landing, which often adds misleading noise that we aren’t interested in.
Markers
M → place a marker
Blackbox Explorer will then display time difference and frequency between markers. For instance, it’s useful for measuring delays between setpoint and gyro, and the frequency of vibration.
Hidden Hotkeys (Extremely Useful)
Alt + ← or →: move one data sample at a time
Shift + ← or →: change view scale by 10% increments
Alt + click a trace (in legend): toggle grid lines for that trace
Alt + click a trace group: split grouped traces into individual lines
Spectrum Analyzer mode:
Shift + move cursor: display exact frequency
Left-click: place marker at that frequency
Syncing Video to Your Blackbox Log
If you have onboard footage, Blackbox Explorer can overlay graphs on top of it, making it easier to understand what the quad was physically doing at any moment.
Is syncing necessary?
Not at all. I rarely sync video myself because it adds extra time. But it can help:
Visualize oscillations
Confirm propwash
See exactly when crash events occur
Compare actual motion with stick inputs
Tip: Always use raw, unstabilized footage. Stabilized video may hide wobble, vibrations, overshoots, and bounce-back.
Video Requirements
MP4 format only
Stabilization off (preferred)
How to Sync Video and Log
The easiest method is to sync using your first roll or flip:
In the log, scrub to the moment you initiate a roll/flip.
Press M to place a marker at where your stick begin to move.
In the video, scroll to the frame where the roll/flip begins.
Press Alt + M to sync the log with the video.
Now you can play the log and the video together in perfect alignment.
What Moves to Perform for Blackbox Logging
For troubleshooting, simply perform whatever moves reproduce the issue you’re trying to diagnose.
For general tuning, here are the maneuvers I normally perform to capture useful, repeatable data:
Hover for a few seconds, then cruise forward steadily for another few seconds.
Do 2–3 throttle punches, ramp up throttle cleanly and gradually over 3–5 seconds. This helps detect oscillations at various throttle levels without shock-loading the quad.
Full rolls, flips, and yaw spins. Perform several in both directions. Avoid mixing axes — keep moves isolated (pure roll, pure pitch, pure yaw).
Rapid throttle pumps. For example: 20% → 70% → 20%, repeated a few times. This can reveal nose dips caused by inadequate I term authority or poor tune.
Split-S and sharp 180° turns. These maneuvers are great for revealing propwash, especially if you perform them smoothly and repeatedly.
Input-less cruising. In an open safe area, fly forward without touching the sticks. Light wind is OK; heavy gusts introduce noise into the data. This is great for evaluating straight-line stability and I gain.
Avoid random cruising or just hovering. These produce logs with very little meaningful information. You want clean, distinct, repeatable stick inputs (step inputs) so you can clearly see how the quad responds.
What Graphs/Traces To Look At?
This depends on what you’re troubleshooting, but for general tuning I recommend using a pre-made workspace.
A “Workspace” in Blackbox Explorer is essentially a preset of traces so you don’t have to configure everything manually every time.
Use number keys 1–9 or the dropdown menu to switch between workspaces if you have multiple templates loaded.
Focusing on a Specific Trace Group
Click on the name of a trace group (e.g., [-] Roll) to isolate just that group. This hides the rest of the graphs for clarity.
Press 0 to return to the original workspace view.
How to Read and Understand Traces
This is how traces look like in a full roll or flip. The cursor (red line) is in the center of the roll, and in the legend on the right, you can see Gyro is reporting 702 deg/s, which is exactly what I set in my max rates.
In the traces, you can see how P, I, D and Feedforward are doing their jobs during this move:
P is pushing the quad into the roll as commanded
Feedforward is helping to push the quad faster to bring gyro closer to setpoint to minimize delay
D is going the opposite direction to prevent overshoot
And here’s a punch out, you can see motor outputs (the very messy lines) are ramping up with throttle (red line).
Notice Motor 1 (light green) enters saturation (hitting 100%) long before all the other motors, even before throttle reaching 100%. This could be a sign of uneven mass distribution of the drone, maybe it’s tail heavy since motor 1 is the rear left motor. Or perhaps that motor isn’t producing as much thrust as other motors and requires further investigation. You don’t have to guess from how it “feels” – you can actually see it with proof.
I hope you see why Blackbox is such an interesting and useful tool :)
How to Analyse Noise?
Blackbox Explorer includes a built-in Spectrum Analyzer that shows noise levels across frequencies of any traces, we are particularly interested in gyro and D_term.
Click the “View Analyser Display” button in the menu bar, then select a trace you want to analyse in the Legend, then click Zoom Analyser Window.
To see the exact frequency, press SHIFT and move your cursor, left click to create a marker.
On the top left drop down menu, you can switch to another type of graph – frequency vs Throttle.
Examples
Here are a few examples showing how to use Blackbox logs for general tuning and troubleshooting.
How Well Is Your Drone Tracking the Sticks?
The two most important traces for evaluating control performance are:
Setpoint – what we want the drone to do (i.e., your stick input after RC smoothing)
Gyro – what the drone is actually doing
By comparing these two traces, you can quickly see how accurately your quad responds to your commands.
Ideal Tracking
In a perfect world, the Gyro trace sits directly on top of the Setpoint trace. In reality, this isn’t physically possible — motors need time to accelerate and decelerate — but the closer they are, the more locked-in, precise, and responsive the quad feels.
PID Tuning Is a Balance Act
If the gyro is lagging behind the setpoint, consider increasing Feedforward or P gain. If there’s overshoot, D gain is there to dampen it. But if D gain is too high it could amplify any existing noise issue and make your quad fly worse or even cause hot motors. So there’s a balance to strike between these terms.
When PID Doesn’t Help
And if increasing Feedforward or P gain doesn’t bring gyro closer to setpoint, check motor traces and see if any of them has reached their limits. If they are already running at 100%, it just means your drone has reach its physical limit and you just can’t push performance any further. If gyro lags behind setpoint a lot and motors are already saturated, that’s a good indication your motors don’t have enough torque, to improve performance you probably have to upgrade the motors.
Know When To Stop Tweaking PID
Your drone has a decent tune if your gyro closely follows your setpoint in Blackbox with minimal overshoot. At this point, further PID tweaks are mostly about personal feel, not huge performance gains. You could move the Master slider slightly up/down for more/less sharpness, however, if you push it too far you’ll hear fluttering / oscillation during flips and high throttle and results in hot motors.
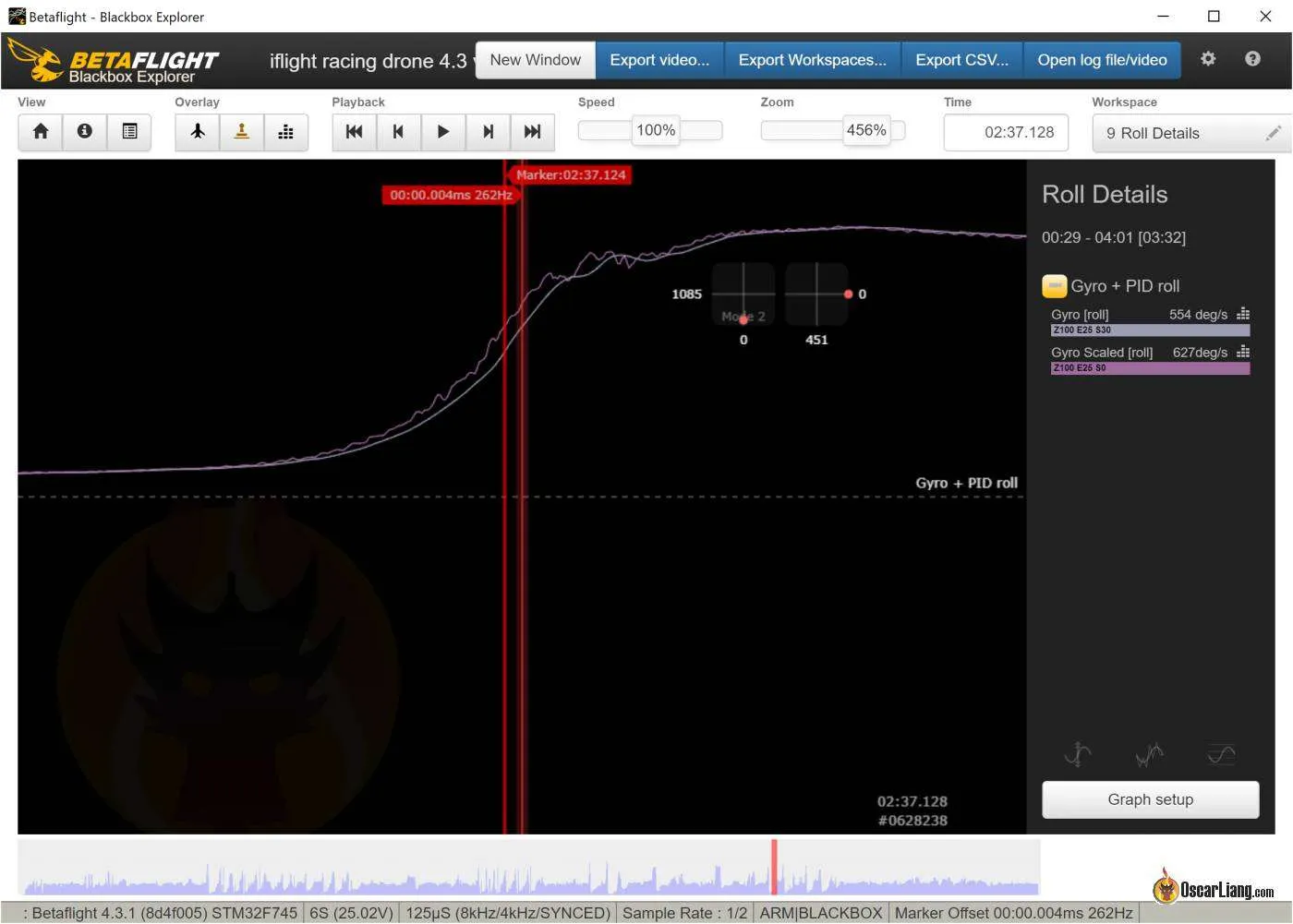
Measuring Gyro Filter Delay
In Blackbox Graphs, Gyro_Scaled is the raw gyro data (noisier), and Gyro is the filtered gyro data (smoother but with delay).
You can measure the time difference between the two lines, and that gives you the delay caused by all the gyro filtering.
Press “M” key to create a marker. Zoom in for better accuracy.
P Gains Too High or D Gain Too Low
To achieve critical damped response, P and D should be in a good ratio.
When P is too high (or D is too low), P will overshoot or even oscillate in worse cases as you move the stick, and those wiggles can get into the gyro trace. To fix it, you can increase D to dampen it, or decrease P.
Excessive I Gain Causing Overshoot
Not only excessively high P gain can cause overshoot, I term can do that too but the overshoot is slower as you can see here.
Feedforward Too High
Feedforward can help gyro track setpoint better, but too much Feedforward can cause it to overshoot. In this case you can see the gyro line moves before the setpoint, it actually causes P and D to move the opposite direction of the stick to try to slow down the gyro.
Prop Wash
This is what propwash looks like. When some of the motors enter saturation (working at 100%) for a few ms, you know your drone is working at its hardest to combat propwash and that’s good!
Measuring RC Link Packet Rate
RC commands have steps, each step is a data packet. By measuring the time between steps gives you the packet rate (in Hz) of the RC link.
Press “M” key to create a marker. Zoom in for higher accuracy.
Alternatively you can find out in the noise analysis graph. The stepping frequency would be shown as a peak in the noise in RC commands. Sometimes it could be off by a couple of Hz.
PID and Feedforward Oscillation Caused By Stick
When you let go of the stick at full deflection, it can bounce around the center point and cause ringing oscillation to feedforward and PID. That’s why you should keep your fingers on the sticks at all time when flying.
Anti Gravity is Working
When moving throttle rapidly, drones can get nose dips when I gain is low. Anti Gravity can boost I term during these extreme movements to stabilize the drone better.
One motor working harder than the rest
When hovering, one motor is working harder than the rest. This is usually an indication of an ESC or motor issue. try swapping around the motors. In this example, motor 1 clearly has issue, so after swapping the motors around, if the same motor still having issue, then the ESC is the culprit.
ESC Desync
An ESC desync occurs when one of the motors stalls (stops spinning and thus stops producing thrust), prompting the drone to command that motor to spin harder, causing the motor signal to reach its maximum of 100%. Learn how to fix ESC desync here: https://oscarliang.com/fix-esc-desync/
Verify If RC Smoothing Is Adequate
To verify if your radio link is smooth and responsive, check these traces:
RC Command: These are raw inputs from the radio link, they should have small, evenly spaced steps when you move the sticks
Setpoint: This is basically the filtered RC commands, should be smooth without any steps if RC smoothing is working.
Feedforward: Should also be smooth; if you see spikes, it might be caused by setpoint being too steppy due to insufficient RC smoothing
If you’re using Crossfire or a protocol with dynamic packet rates, you might see inconsistent RC steps. In this case, set your packet rates in the radio to a fixed one, or increase RC smoothing settings in Betaflight as required.
More Blackbox Tips
I plan to add more troubleshooting tips using Blackbox, please let me know in the comments what other blackbox log examples you want to see.
Conclusion
Blackbox is one of the most powerful tools available in Betaflight, and once you understand how to use it, tuning and troubleshooting your FPV drone becomes far more predictable and far less mysterious. Instead of relying solely on “feel,” guesses, or trial-and-error PID changes, Blackbox lets you see exactly what your quad is doing — how well it tracks your inputs, where noise is coming from, whether motors are saturating, and how your PID terms interact in real flight.
Edit History
Oct 2022 – tutorial published
Dec 2025 – updated for Betaflight Version 2025.12.0
buenas tardes Oscar, me encanta tu trabajao me ha ayudado mucho en muchas ocasiones. pero ahora estoy super atascado y me esta costando el dinero. No consigo dar con la tecla, entre otras cosas por que no encuentro informacion especifica sobre ello. te pongo en antecedente. tengo construido un 15″ con 12S montado todo en un frame tbs source X. Los componentes son los siguiente:
– pdb apd 500A – Fc tmotor f7 HD – variadores FLYCOLOR X-cross HV3 160A – Motores BrotherHobby Tornado T10 5215 Pro 500KV – Receptor Crossfire nano. – Dji Air Unit. – Capacitador 100v 2200uf – Frame tbs Source X – Buzzer Vifly finder 2 – lipos tattu 4500mah 95c. 6s (conecto 2 para los 12S) – helices HQ 15×7 tripala (se que son agresivas, podria cambiar a unas 13×5 para reducir vibraciones a cambio de algo de empuje)
*El problema es el siguiente haciendo el primer vuelo de prueba, solo levantar volar despacios en linea recta y volver…… no llego al volver a los 28segundos de vuelo se tambaleo y uno de los variadores se quemo en pleno vuelo. por mas que intento comprender por que, no logro sacar nada en claro y no se que hacer para solucionarlo. no se como configurar los pid. y ya me da cosa intentar para romper mas. esa caida tonta desde 1m de altura me costo una pata mas el variador qyue no es barato…… no se si cambiar todos los variadores para irme a am32 y poder configurarlos o seguir con estos flycolor blheli32 con version prototipo que no puedo modificar. un poco de ayuda por favor. de veras gracias de antemano por la ayuda que puedas brindarme.
I really appreciate your work supporting this community, Oscar. Your website is my preferred first-stop. I especially like the written format instead of yT videos. Thank you! PS: which is the preferrer way to support your efforts?
Hello sir I am facing a problem. I have the Speedybee f4 v4 fc and i installed a 32gb high speed sd card in it bcz I already had it, when I record blackbox and open it in blackbox explorer it says error opening log no logs in this file could be parsed successfully. I tried every logging rate and also tried with only gyro scaled and acc, but the problem stays. Please help.
Hello, Oscar! Please help me with this question! I tried to write blackbox log file to SD card, as a result I got a file with .BFL extension (in LOGS folder). But file with this extension is not readable by Blackbox Explorer (I used web version). Only files with the extension .BBL are readable What have I done wrong, how can I get the .BBL file on the SD card?
I have a KM55 ESC from Skystarts with AM32, when I look in the ESC Configurator I see that startup power is 100. Do you know the recommend value for AM32 when desyncs happen? I’m very happy that AM32 has a desync recovery, otherwise I would have had another bag of broken parts…
I have a problem with open black box log files. Only the first file is successfully opened, the second and subsequent ones show an error. Can you suggest a solution or reason? SD card 32GB
Just had my drone fall out of the sky literally, I was cruising and then it started spinning and went down. Luckly I managed to recover it and now can use BB data for analysis. Blackbox shows that right before it starts spinning one of motors goes to zero output. Diagonal motor goes to 100% apparently one compensating the other. Am I safe to assume that my prop just fell off (and if so, which one, on the motor that goes to 0 or the one that goes to 100 trying to grasp thin air without a prop?) If not, what does it make sense to look for further?
Sorry for a maybe dumb question. My spectrum analyse windiw always stops at 400Hz. No matter what I do. In all tutorials and screenshots it stops at 100Hz. Can somone tell me what I’m doing wrong, so that it doesn’t sho me any noise with more than 400Hz frequency? I’m looking aince hours and can’t find a setting for the max. Frequency on the x axis.
Did you configure your Blackbox settings as shown here before logging? https://oscarliang.com/blackbox/#How-to-Record-Blackbox I have a feeling you left it at default (800Hz for BMI270), that’s why it only show you up to 400Hz.
Thank you for the quick reply. It was just as you suspected. The setting was at 800Hz. I have now increased to 1600Hz. 2000Hz I can not set (BMI270). Thanks for the good support and all the info.
Thanks Oscar, greatly appreciate your tutorial, your site has been my go-to reference aside from youtube. For me, i find it easier to use PidToolBox to tune the P/D ratio, it’s just so much easier to see the critically damped step response compared to BE. But I resort to BE when tuning the filter, I term & feedforward. I’m looking forward to the tutorial on ESC Desync.
Yea I am planning to do some content on PIDtoolbox. I still find it faster to tune quads by ears and looking at googles, then fine tune looking at blackbox. But if someone has no idea how to tune at all, PIDtoolbox is foolproof for sure.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.





























22 comments
buenas tardes Oscar, me encanta tu trabajao me ha ayudado mucho en muchas ocasiones. pero ahora estoy super atascado y me esta costando el dinero. No consigo dar con la tecla, entre otras cosas por que no encuentro informacion especifica sobre ello. te pongo en antecedente. tengo construido un 15″ con 12S montado todo en un frame tbs source X. Los componentes son los siguiente:
– pdb apd 500A
– Fc tmotor f7 HD
– variadores FLYCOLOR X-cross HV3 160A
– Motores BrotherHobby Tornado T10 5215 Pro 500KV
– Receptor Crossfire nano.
– Dji Air Unit.
– Capacitador 100v 2200uf
– Frame tbs Source X
– Buzzer Vifly finder 2
– lipos tattu 4500mah 95c. 6s (conecto 2 para los 12S)
– helices HQ 15×7 tripala (se que son agresivas, podria cambiar a unas 13×5 para reducir vibraciones a cambio de algo de empuje)
*El problema es el siguiente haciendo el primer vuelo de prueba, solo levantar volar despacios en linea recta y volver…… no llego al volver a los 28segundos de vuelo se tambaleo y uno de los variadores se quemo en pleno vuelo. por mas que intento comprender por que, no logro sacar nada en claro y no se que hacer para solucionarlo. no se como configurar los pid. y ya me da cosa intentar para romper mas. esa caida tonta desde 1m de altura me costo una pata mas el variador qyue no es barato…… no se si cambiar todos los variadores para irme a am32 y poder configurarlos o seguir con estos flycolor blheli32 con version prototipo que no puedo modificar. un poco de ayuda por favor.
de veras gracias de antemano por la ayuda que puedas brindarme.
I really appreciate your work supporting this community, Oscar. Your website is my preferred first-stop. I especially like the written format instead of yT videos. Thank you! PS: which is the preferrer way to support your efforts?
Thank you. Here are the info how to support this blog: https://oscarliang.com/support-me/
Hello sir
I am facing a problem. I have the Speedybee f4 v4 fc and i installed a 32gb high speed sd card in it bcz I already had it, when I record blackbox and open it in blackbox explorer it says error opening log no logs in this file could be parsed successfully. I tried every logging rate and also tried with only gyro scaled and acc, but the problem stays. Please help.
Dear All, I am having issues with using templates, it does not seem to load them properly, do you face the same issue? Thank you
Thank you so so much for sharing your knowledge !!!!!!
Hello, Oscar!
Please help me with this question! I tried to write blackbox log file to SD card, as a result I got a file with .BFL extension (in LOGS folder). But file with this extension is not readable by Blackbox Explorer (I used web version). Only files with the extension .BBL are readable
What have I done wrong, how can I get the .BBL file on the SD card?
Maybe you have an old version of Betaflight on your FC? Can you not just change the existing logs’ extensions to .BBL?
You are just a boon to the community! Thanks for all the work.
motor diagnosis using blackbox
I have a KM55 ESC from Skystarts with AM32, when I look in the ESC Configurator I see that startup power is 100.
Do you know the recommend value for AM32 when desyncs happen? I’m very happy that AM32 has a desync recovery, otherwise I would have had another bag of broken parts…
I have a problem with open black box log files. Only the first file is successfully opened, the second and subsequent ones show an error. Can you suggest a solution or reason?
SD card 32GB
Just had my drone fall out of the sky literally, I was cruising and then it started spinning and went down. Luckly I managed to recover it and now can use BB data for analysis. Blackbox shows that right before it starts spinning one of motors goes to zero output. Diagonal motor goes to 100% apparently one compensating the other. Am I safe to assume that my prop just fell off (and if so, which one, on the motor that goes to 0 or the one that goes to 100 trying to grasp thin air without a prop?) If not, what does it make sense to look for further?
just one question, if I’m using onboard dataflash chip to save the logs, how much of a log I can save with 1kHZ logging if my memory is only 16MB?
10 to 20 mins?
Sorry for a maybe dumb question. My spectrum analyse windiw always stops at 400Hz. No matter what I do. In all tutorials and screenshots it stops at 100Hz. Can somone tell me what I’m doing wrong, so that it doesn’t sho me any noise with more than 400Hz frequency? I’m looking aince hours and can’t find a setting for the max. Frequency on the x axis.
Did you configure your Blackbox settings as shown here before logging? https://oscarliang.com/blackbox/#How-to-Record-Blackbox
I have a feeling you left it at default (800Hz for BMI270), that’s why it only show you up to 400Hz.
Thank you for the quick reply. It was just as you suspected. The setting was at 800Hz. I have now increased to 1600Hz. 2000Hz I can not set (BMI270).
Thanks for the good support and all the info.
Thanks Oscar, greatly appreciate your tutorial, your site has been my go-to reference aside from youtube. For me, i find it easier to use PidToolBox to tune the P/D ratio, it’s just so much easier to see the critically damped step response compared to BE. But I resort to BE when tuning the filter, I term & feedforward. I’m looking forward to the tutorial on ESC Desync.
Yea I am planning to do some content on PIDtoolbox.
I still find it faster to tune quads by ears and looking at googles, then fine tune looking at blackbox. But if someone has no idea how to tune at all, PIDtoolbox is foolproof for sure.
Yayy
Exactly what I needed👌
I have one left question, what about Pid Toolbox? I don’t know what It’s used for and how to use it (didn’t find any Video explaining it)
I might do another post about it later. It’s a great tool too!