Introducing the Darwin129 from DarwinFPV: the most budget-friendly 7″ FPV drone on the market, available for under $190 as a PNP option! While it boasts an attractive price point, this drone comes with some imperfections and drawbacks. In this review, we’ll discuss the key features, technical specifications, and performance of the Darwin129 to help you decide if it’s the right drone for you. I’ll also share some tips on how to enhance its performance and tune it for a better flying experience.

Looking to learn how to build an FPV drone from scratch? Check out my comprehensive tutorial here: https://oscarliang.com/how-to-build-fpv-drone/
Table of Contents
Where to Buy
You can purchase the Darwin129 from the following vendors:
- AliExpress: https://s.click.aliexpress.com/e/_DD44fBx
- DarwinFPV: https://oscarliang.com/product-s1ng
Priced at just $189, the Darwin129 is a 7-inch analog FPV drone that initially might make you question its quality. However, after flying it for about a week, I’ve found it’s actually a decent option for specific tasks, which I’ll discuss in more detail throughout this review.
The box includes the following accessories:
- A set of 7″ tri-blade propellers
- Spare screws and zip ties
- Manual and stickers
- Battery strap
- VTX antenna (15cm long)

Please note that you’ll need to install your own radio receiver. For ExpressLRS users, I recommend the Radiomaster RP1 or RP2 receiver for this drone. Find the receivers here: https://oscarliang.com/setup-expresslrs-2-4ghz/#Receivers
LiPo batteries are not included. 4S 1500mAh LiPo is a suitable size for this drone, but it can also accommodate larger batteries for longer flight times, such as a Li-ion 4S 3400mAh. Find the batteries here: https://oscarliang.com/lipo-battery-guide/#Battery-Recommendations
Specifications and Components

The Darwin129 arrives pre-built from the factory, sparing you the hassle of assembly. You still need to install your own receiver, but that’s far easier than building the entire drone from scratch.
It includes extra 3D printed parts like a GoPro camera mount, a GPS holder, and a radio receiver antenna mount at the back. The frame, arms, and motors resemble another budget 7″ option – the Tyro129 from Eachine – but the bearings on the Darwin129 appear to be smoother.

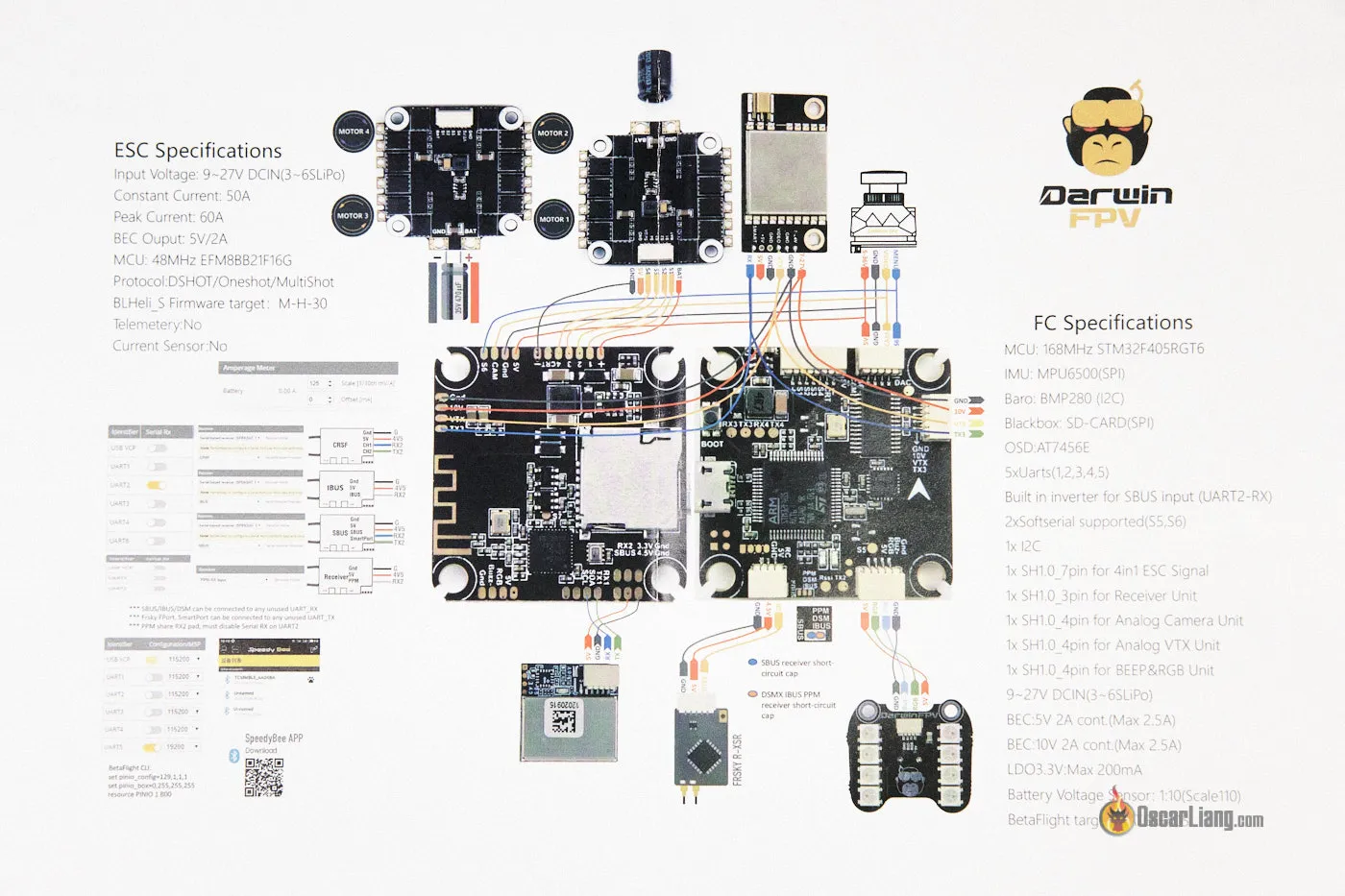
The Darwin129 features the following components:
- F405 FC with MPU6000 gyro (30x30mm, unbranded)
- BLHeli_S 4In1 50A Blheli_S ESC (30x30mm, unbranded)
- 2507 1800KV motors
- Gemfan 7040×3 props
- TX805 800mW 40CH analog VTX
- Darwin B19 “1500TVL” Camera

The FC comes with an onboard Bluetooth module, enabling you to connect to the Speedybee Betaflight App on your smartphone for wireless configuration. The F4 FC offers 6 full UARTs, which is enough even for long-range builds that normally have many peripherals. It also has a 10V 1A BEC, along with 5V and 3.3V BECs.


The 800mW video transmitter supports SmartAudio, which allows VTX setting changes through Betaflight OSD. Some speculate that the generic-looking FPV camera in the Darwin129 is the discontinued Caddx Turbo Micro F1. Regardless, the advertised “1500TVL” camera is a major letdown and is one of the worst cameras I’ve ever used.

The Darwin129 also comes with a GPS module and an LED board with an installed buzzer – features which are often absent in more expensive models.

Construction and Design
A few months ago, I discussed how the cheapest 5″ FPV drone with decent components would cost at least $240: https://oscarliang.com/cheapest-fpv-drone-build/. While the Darwin129 clearly won’t fly as well as the build I suggested in that post, for $189, the Darwin129 offers an incredible value for a prebuilt 7″ FPV drone.
The build quality is quite decent actually, all the solder joints look high-quality and reliable. All the bolts are fastened properly, and there are no missing or loose screws.

The arms look a bit thin for a 7″ drone, but they are quite rigid, and the frame doesn’t flex when I try to bend it with my hands. Given the price point, one can’t be too picky – it’s impressive that it flies at all.
The drone features a racing pod design, which saves weight but also means there’s less space for component installation, requiring the battery to be placed on the bottom. However, since DarwinFPV has already built it for us, the lack of space isn’t a concern.

One issue with the tight frame is that the camera presses against the ESC, limiting the up-tilt angle of the camera to about 25 degrees.

All you need to do is add your own receiver, configure Betaflight, and you’re ready to fly.
The Darwin129 weighs 402 grams without the battery, 590g with a 4S 1500mAh LiPo, 600g with a 4S 18650 pack, and 746g with a 4S 1500mAh LiPo and a GoPro Hero 11.

Performance and Drawbacks
Despite its budget components, the DarwinFPV 129 delivers impressive efficiency and flight time. I am achieving almost 9 minutes of flight time on a 4S 1500mAh LiPo battery (cruising, not hovering), and over 20 minutes on a 4S 3400mAh Li-ion pack.
The incredibly high thrust-to-weight ratio allows the drone to hover at around 15% throttle, with decent speed achieved at just 25%. Beginners who are not used to flying powerful builds may find throttle management challenging with the Darwin129.
The stock tune has some stability issues, with constant wobbling that detracts from the flying experience. However, after some basic tuning and optimization, flight performance significantly improves, with a more locked-in feel and reduced wobbling.
I tested both 7042 two-blade and 7040 tri-blade propellers from Gemfan. The two-blade props resulted in severe mid-throttle oscillations and jello, while the tri-blade props performed noticeably better with less oscillation and a more locked-in feel. Flight times were similar for both prop types while cruising at similar speeds.
One of the biggest downsides of the Darwin129 is its camera. The narrow field of view and strange distortion make it difficult to judge distance. Dust inside the lens is visible in goggles and DVR but doesn’t impact visibility. The camera’s maximum up-tilt is limited to around 25 degrees, restricting top speed. Flying faster than 40% throttle causes the drone to look downward and all you see is the ground.
Another major drawback is the GPS performance. It never gets a satellite fix, rendering it useless. While GPS isn’t required for flying the Darwin129, it’s a valuable feature in Betaflight as it enables the drone to return to you in case of signal loss. I have a tutorial on how GPS Rescue mode works in Betaflight: https://oscarliang.com/setup-gps-rescue-mode-betaflight/
Interestingly, the Darwin129 performs better with a GoPro mounted on it, as the additional weight seems to reduce jello and oscillation. And the wobbles and jello can be completely eliminated with the help of Reelsteady (image stabilization in GoPro Player video editor).
Updating Betaflight on the flight controller and flashing Bluejay to the ESC further improves flight performance. However, the GPS stopped working entirely after the update, although I didn’t investigate further since it was already useless.
How to Setup the Darwin129
To set up the Darwin129, first, you’ll need to connect a receiver. I am using an ExpressLRS receiver.
Connecting the RX can be a bit challenging due to the flight controller design, as there is no 5V pad on top of the FC. You have to disconnect all the cables and flip the board over.


You will need to find an UART and 5V power supply to solder to. I chose to power the receiver from the 4V5 pad, which can supply power to the RX from a USB cable without plugging in the battery. The GPS is already using the 4V5 pad, so I am just soldering on top of it. I am using UART2 for RX, and the TX and RX pads are located on both sides of the board, which is slightly annoying but manageable.
Refer to the included manual to locate the solder pads.
The Darwin129 comes with Betaflight 4.1.1, a rather outdated version. To configure it, you should use the older configurator 10.6; otherwise, some settings might not be recognized.
If you want to update Betaflight, you may not find the FC target (MATEKF405) in the Firmware Flasher. This thread suggests trying MATEKF405STD-CLONE, which worked for me. However, after flashing BF4.4, I encountered a CALIB warning (arming disable flag) when trying to arm the drone. The fix was to disable the Barometer in the Configuration tab. I have a tutorial on how to flash Betaflight here: https://oscarliang.com/flash-update-betaflight/
Original CLI diff and VTX Table json file can be found here: https://intofpv.com/t-original-cli-dump-for-darwinfpv-darwin129
After that, I set up Betaflight following this tutorial for the first flight: https://oscarliang.com/betaflight-firmware-setup/

Tuning Tips
Update Betaflight to the latest version, and then flash Bluejay 48KHz to the ESC (you need to update Betaflight first for this to work). I have a tutorial on how to flash Bluejay: https://oscarliang.com/bluejay-blheli-s/
Next, in the Presets tab, load the “Supafly Freestyle 7 Inch” preset. This preset worked well for my Darwin129.
If you wish to tune the drone from scratch, check out my PID and filter tuning guide using Blackbox: https://oscarliang.com/pid-filter-tuning-blackbox/
Conclusion and Recommendations

I typically only recommend high-quality products, and the Darwin129 certainly isn’t one. However, its low price makes it hard to pass up.
The Darwin129 isn’t for everyone though. If you’re looking for the most affordable 7-inch drone that offers extremely long flight time and you’re not overly concerned about its flight performance, the DarwinFPV Darwin129 is an excellent choice. However, you might want to swap out the GPS for true long-range flying. Take a look at my GPS recommendations: https://oscarliang.com/gps-review/
I also strongly suggest replacing the camera with a better-quality one, which would add an extra $30 to the overall cost of the drone but it would be worth it. Check out my camera recommendations: https://oscarliang.com/fpv-camera/#Analog
You can purchase the Darwin129 from the following vendors:
- AliExpress: https://s.click.aliexpress.com/e/_DD44fBx
- DarwinFPV: https://oscarliang.com/product-z37h
In conclusion, if you’re willing to invest in some new components and spend time to tuning the drone, the Darwin129 from DarwinFPV offers great value for money.
20 comments
Oscar, what camera would you recommend in place of the disastrous one that comes with it? Also, have you tested range? how many km away were you able to fly until the video link or the radio link went down, or reaching 50% battery? TIA!
To be honest I don’t recommend this model after building my own, check out my build here for only $150: https://oscarliang.com/150-dollar-7inch-fpv-drone/
Thank you very much for the link, Oscar. I had seen it previously but hadn’t considered it properly because I was looking for something less DIY (ideally a BNF, or at least a PNP). I’m re-considering it now, will follow up on the comments there.
I ran into the same thing with the MSP calibrating, ditching the BARO worked. I used the Supafly Freestyle 7 Inch preset and it was super smooth, probably my best flying quad on 4s. When I jumped to 6s, it floated too much, to the point that I had to toss it in horizon mode dive to the ground and then left off the pitch and kill disarm.
MATEKF405-STD and UART
BetaFlight shows the RX as being in Serial (via UART) mode.
Connecting to the RX via WiFi identifies it as a BETAFPV 2.4GHz Nano RX with Firmware Rev. ver.unknown (8d3388) ISM2G4.
When I update from BF 4.1.1 to 4.4.2, my ELRS no longer works. When I go back to 4.1.1, it works. Any idea how to get it to work on 4.4.2? I am using the ELRS that was built in from the manufacturer. Also, does ayone have PIDs after updating to 4.4.2?
Built-in receiver? Mine didnt’ come with any receiver and I had to use my own.
What flight controller did yours come with? And is it a SPI or UART receiver do you know?
MATEKF405-STD, which is UART. The receiver itself I will need to check.
Hey Oscar when you updated to betaflight 4.4 did you lose ledstrip function? After I updated this I can’t seem to get the ledstrip to work anymore no matter how I configured it. The flight controller has a plug and break out pads to put the ledstrip/buzzer. I had it plugged into the plug and I get nothing. I soldered it to the rgb/buzzer/+/- and the beeper works but only one led lights up white. Weird thing is I tried flashing a different target than the std-clone I think it was matekf405 ctr and after flashing all the leds will work without configuration in betaflight. Once I started to configure it in bf they didn’t work anymore. I was wondering if you can help me out with this problem. I tired asking on bf discord and a few other places but nobody knows how to help me. I don’t know if it’s a resource conflict or I need to do some remapping. Any help I would really appreciate it.
Hello Oscar can you please help me out. I figured since you updated your darwinfpv 129. For some reason when I put my 129 into boot loader mode betaflight does not detect it. Betaflight detects it when I just plug it in to configure everything. I tried the cli and forcing it into dfu mode but no go. Was wondering if you had any trouble with your. Any help would be greatly appreciated
Try to install driver? Sometimes you need to do this for new FC. Check out this post for instruction: https://oscarliang.com/fc-driver-issues-flash-firmware/
You have to disconnect the GPS to be able to enter boot mode through USB. Because they both are on Uart1
Disconnect the gps connector, install the drivers on the betaflight welcome page, plug your drone in with the boot button held down. Then run impulseRC driver fixer and after that itll say STM32 bootloader in betaflight and you can flash 4.4.2 onto your drone. Plug your GPs back in on the front of your drone so it actually works.
Thanks for the configurator tip.
On the latest BF screams the PID tube could cause all kinds of issues including flyaway…
All components should’ve been made for 6s, main reason I never purchased. I already fly 6s and that would’ve been perfect to get a cheap 7″.
Hi Oscar, does darwin129 takes 6S? Motor seems able to handle 6S.
No, the motors are only rated up to 5S, but the motor KV seem to be a bit too high for 7″ props if you want to run 5S, I think 4S on this quad is probably safer and it offers a lot of power. If you want to run 5S you probably want to run smaller propellers just to be safe.
I run 6s on mine but turn down motor power to 66%. Same flight times. You can get rid of the calib error with the STD_CLONE target by turning off either baro or the led’s. I chose LED’s. I couldn’t get altitude to work in osd with DJI air unit until I flashed 4.4. GPS needs an upgrade. Used JESC to enable motor filtering. Arms are not that sturdy in a crash and motors are easily bent but these are very cheap replacements and was able to bend the motors back true. Good little 7″ starter.
That exact drone is in use by military at war in Ukraine: twitter.com/i/status/1638207592508841985
That’s wild…
I wonder if they got the GPS working or they are used as kamikaze drones.
They’re also using top mount batt set up.
Which I’ve been wondering if this drone could do.
It looks like a Tyro129 Clone. Also the name.