The commonly known helicopter has one motor, while multicopter is an unique kind of aircraft that is equipped with two or more motors. In this post we will introduce you to some popular types of multirotor, and explore the pros and cons of these configurations.

Tutorial: I will show you how to build a racing drone from scratch.
What is Multirotor
Multicopters (as known as multirotors) often use fixed-pitch propellers, so the control of vehicle motion is achieved by varying the relative speed of each motor. Radio controlled multicopters are increasingly popular for aerial photography, and land surveying. More recently Drone Racing is a hot topics, where multicopters are used in racing and free-style competition.
There are many types of multirotor. They are generally categorized by the number of motors used, for example a three-motored multicopter is a called a tricopter, and the configuration can also be referred to as Y3. In this post we will discuss the following types of multirotors:
- Bicopter
- Tricopter (Y3, T3)
- Quadcopter (X4, Y4, V-Tail, A-Tail)
- Pentacopter
- Hexacopter (Y6)
- Octocopter (X8)
The number of motors and configuration have impact on flight performance, and each has its own advantages. For instance the more motors, the more power and lift capacity, which means you could carry more payload. More motors also means better redundancy in case of motor failure. But the downside is decrease in power efficiency, and increase in the cost of purchasing additional hardware and maintenance. We will also discuss the benefits of Coaxial Motor-Arrangement.
Bicopter – 2-Motor Multicopter
The BiCopter has two motors that can be moved by servos to desired tilt angles. It looks similar to the “Avatar Gunship” (if you have seen the movie Avatar). Here is an example of the bicopter avatar gunship.

Bicopter could be the cheapest multicopter config to build among all because it only uses two motors and two servos. But it’s also the most difficult platform to stabilize in flight. It has the least lifting power given the fact that it only has 2 motors.
Bicopter is not a very popular configuration for hobbyists, and there isn’t much information to be found on the internet.

Tricopter – 3-Motor Multicopter
The Tricopter has 3 motors, and typically in a “Y” shape, where the arms are usually 120 degrees apart. Tricopters can sometimes be found in a “T” shape too.
Two propellers on the front arms spins the opposite direction to counter each other out. The rear motor can be tilted left and right by a servo to enable the yaw mechanism.
Here is a “Y3” tricopter I built before. Here is a “T3″ Tricopter example.

It’s a popular yet relatively cheap configuration because it only requires 3 motors, although you also need an additional servo but they are generally cheaper than brushless motors. Generally speaking, tricopters are less stable than other multirotors with more motors, and it’s not as robust due to the vulnerability of the tail servo and mechanics in crashes. For hobbyists, it’s also harder to build because of the yaw mechanism.
Tricopter has more yaw authority comparing to a quadcopter. What that means is when a quadcopter or hexacopter yaws, they do so by slowing down half of the motors and speeding the other half. If the copter is already at full speed (all motors at 100%), it will have to lower the speed to make yaw happens. However on a Tricopter, it uses a servo to achieve yaw so it loses less thrust when the same situation happens.
It also has lower lifting power because of the smaller motor numbers.

QuadCopter – 4-Motor multicopter
A quadcopter has 4 motors mounted on a symmetric frame, each arm is typically 90 degree apart for the X4 config. Two motors rotate CW (clockwise), and the other two rotate CCW (counter clockwise) to create opposite force to stay balance. Quadcopter is the most popular multirotor configuration, with the simplest mechanical structure. It’s widely used for drone racing in the form of “mini quad”.

There are 2 main configurations: X or +. X config is more popular as you can keep the propellers out of the camera’s view (for FPV and aerial filming). Some people fly the plus (+) config because it’s more intuitive, and flies like an airplane. It’s easier to figure out the orientation.

There is also the H configuration, which allows a camera to be placed on the frame well forward to avoid having propellers in the view of the camera. There are always debates about whether X or H are better, especially in the mini quad community.
Y4 – 4 motors
It looks like a tricopter but without the tail servo. There are two normal propellers and motors in front on separate arms and two coaxial motors in the rear mounted to one arm. Mechanically it’s simpler than tricopters because of the absence of the and yaw mechanism.

While they weigh almost the same they have about 1/3 more lifting power than tricopters. They are usually more reliable than Tricopters because there is no potential servo issues.
VTail and ATail – 4 motors
The V-Tail and A-Tail are basically quadcopter config with the front motors on normal quadcopter arms, while the rear motors located in close proximity, tilted at an vertical angle either inward or outward. It’s a mix between a quadcopter and a tricopter and very similar to Y4 config.

This is not a popular configuration because it gives lower power efficiency (air flow interference at the tail motors). However VTail/ATail certainly looks awesome and provides a better orientation visibility.
Pentacopter – 5 Motors
There isn’t much information on this config because it’s not a popular setup. But there have been people building this and verified the feasibility of this cool looking config.
One obvious advantage of the pentacopter is the wide angle of the two front arm which allows the propellers to stay out of the camera view as far as possible.
Hexacopter – 6-Motor Multirotor
The hexacopter has 6 motors mounted typically 60 degree apart on a symmetric frame, with three sets of CW and CCW motors/propellers.

Hexacopters are very similar to the quadcopters, but they provide more lifting capacity with the extra motors. There is also improvement in redundancy: if one motor fails, the aircraft can still remain stable enough for a safe landing. The downside is that they tend to be larger in size and more expensive to build.

Y6 Hexacopter – 6 Motors
The Y6 has 6 motors on a “Y” shape frame. They are similar in shape to a tricopter but it has two motors on per arm, one above and the other. It uses both CW and CCW propellers on the same arm rather than a servo to enable yaw.

This type of multicopter can be made really compact (similar size to a tricopter), but with similar lifting capability as a hexacopter. However Y6 config is less efficient due to the coaxial motor arrangement.

Octocopter – 8 Motors
A typical octocopter has 8 motors on the same level with four sets of CW and CCW propellers.

Octocopters are similar to quadcopters and hexacopters. It’s like an upgrade version of the hexacopter with even more lifting capacity and redundancy.
However the large number of motors means they draw more current, and you will probably need to carry multiple battery packs. Also it’s going to be expensive.
They are very popular as aerial photography platforms and carrying heavy, professional filming gears.
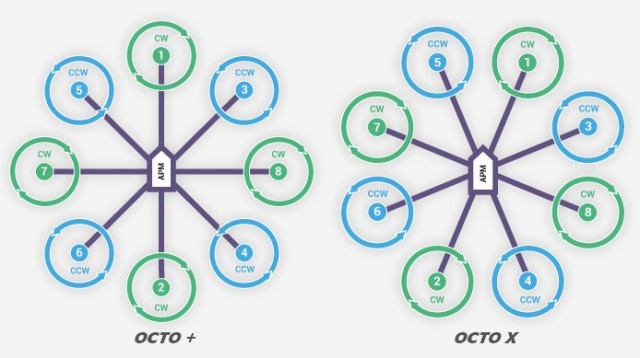
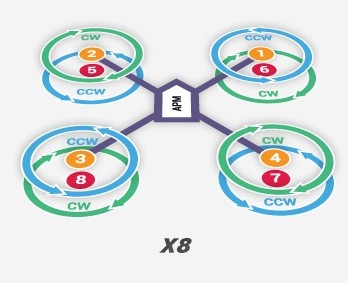
X8 – 8 Motors
An X8 octocopter uses 8 motors that are mounted on four arms, on an “X” shaped frame with four sets of CW and CCW props. Characteristics are similar to the Y6.

How to choose the right multicopter configuration?
It depends on what you are going to do with it. For racing or freestyle, you won’t go wrong with a quadcopter or tricopter. Even if you crash there are fewer props to replace (which happens more often when you fly fast and in close proximity). For aerial photography you can probably use get away with a quadcopter if you are just recording with a GoPro. But if you want to carry heavier gear like a gimbal, or you want a more stable and reliable platform, you might want to consider a Hexacopter or even Octocopter.
Coaxial Motor-Arrangement
In Y6, X8, Y4 multicopter configurations, we encounter something called coaxial motor-arrangement. There are some pros and cons about them.
Advantages of Coaxial motor-arrangement
- When there are more than 5 motors present, it provides redundancy: if one motor fails the aircraft can still maintain balance in the air and allow it to land safely
- Save space
- Possibility to make the frame foldable for better mobility
Disadvantages
- Some 10-20% loss in power efficiency. Basically the bottom motor is just turning in already sped-up air, it’s losing efficiency
- Propellers can get caught by obstacles more easily as pilots could oversee them
- Because the propellers are located above and below the arms, they are hard to hide from the camera’s view
- Difficult to find appropriate landing gear
Article first created in Oct 2013, last updated in Nov 2016.
18 comments
Oscar,
Great website! I really appreciate the knowledge and the info!!
I would like to build my own. Obviously, I’d like to maximize payload up to FAA regulations (< 55lbs, drone plus payload). Where is the best place to look for motors and rotors and such? I am also interested in finding robotic servos and the like…
Also, what are the lightest batteries, most efficient motors, etc., that you've seen? Obviously, the longer the flying time the better the drone, as well…
Thanks again, buddy!!
Technically, helicopters have either a tail rotor or a coaxial main rotor, so they are also really a form of “bi-copter”…
Hi Oscar
About hexacopter…
“The hexacopter has 6 motors mounted on 6 arms 120 degree apart on a symmetric frame, with three sets of CW and CCW propellers”
You know.. I a not entirely certain that 120 degrees is accurate for a Hex :)
Hello oscar, actually I planned to build hexacopter in wooden booms.bt I get little confused on angles and designs.and guide me to ,how to set up the angle for that…thank you
Hi Oscar,
The payload that I required my copter to lift is 65kg excluding the weight of the copter itself. Based on your information, an octocopter would be the best choice. I would like to know how to calculate the thrust, power required and size of the propellers. I would really appreciate it if you can help me.
Hi Oscar! Your work on providing best information is Admirable.
I want to lift about 500-800 grams through this multicopter. In such case which copter suits best and what might be the technical requirements.You can better send me the info or atleast any web-link.
500-800 grams is not a lot, quadcopter / hexacopter / octocopter can all do it.
generally, the more rotors there are the more lifting power you will have, but also the less endurance you will have, becuase you are sucking power from the battery much quicker with more rotors. the primary thing to consider, though is the power of the motors. a typical 400 class quad can lift an additional 2kgs (not including the weight of the vehicle itself) with the right setup. there are online calculators that can help you choose the right combination of motors, props, batteries. google ecalc, for example.
HI ORCAR,
TWO QUESTIONS.
COULD YOU PLEASE ADVISE ME THE BEST UAV AND SENSORS FOR CINEMATOGRAPHY?
FOR MAPPING WHAT IS THE BEST FIXED WING THAT YOU CAN RECOMMEND? (SHEAP)
Hi Oscar, would there be any benefit in configuring the Hexacopter F550 frame as a Hexa-rotor I vs V??
Hey Oscar,
You mentioned above that the Y-hex copter is less efficient.
However, it looks like Sky-Hero is touting their Spy to be a very fast quad.
[link]
[link]
What do you think of this Spy “rocket”?
HI Alvin
i was talking about efficiency, and you are talking about speed, and I am not sure I understand your point here.
“rocket”? Did they have any speed measurement of the hex they are flying there, but by the look of it, I have seen faster hex, even quad.
oh, wait, are you a marketing guy for this company? :P
I really thank you for this valuable information.
Hi oscar,
I want to know if there is a standard rule for estimating Motor to motor distance along the centre vertically for a Quadcoptor. I am planning to build a frame on my own . I have the design ready but the motor to motor distance is random. I wanted to know if there is a certain rule to go about designing a quad.
Not really, as long as you can fit the prop in, and it’s square, then you should be fine.
Yes it’s doable, and they are a comercial product
This is what you’re looking for :
md4-1000 UAV platform with 88 minutes flight time and 1200g payload.
microdrones.com/index.php
Dear Oscar, this was an interesting article. We are currently looking for surveillance drones with solo-flying capacity and at least 1.5kgs of payload and 60-90 mins of flying time… do you happen to know a manufacturer that you could recommend us?
I truly appreciate your help.
Omar Monroy.