Finally I finished building the ZMR250 V2! It’s kind of a rebuild as I simply migrated most of my components from my old ZMR mini quad. However I am using some new FPVModel 2206 motors and DYS SN20A ESCs with this new frame. :-)

Check out my review on the ZMR250 V2 mini quad frame from FPVModel.
Setup Summary
Parts used for this build, bold part means new components:
- ZMR250 V2 Frame with Full PDB
- Naze32 Acro with Cleanflight 1.9
- DYS SN20A ESC with BLHeli 14.0
- FPVModel 2206 2000KV motors (Review)
- Sony SuperHAD 600TVL FPV Camera
- MinimOSD with MWOSD firmware
- ImmersionRC 5.8Ghz VTX
- Frsky D4R-II RX
- Gemfan 5045 ABS propellers
- Turnigy 4S 65C 1800mah LiPo
- Thug Arms 3mm (Review)
- BG Buzzer

Table of Contents
Latest PID
- PID Controller 1
- Looptime 1200
- Roll P 4.0 – I 0.036 – D 30
- Pitch P 4.6 – I 0.036 – D 36
- Yaw P 10 – I 0.065 – D 1
PDB Connection Diagrams
I spent a very long time checking where all the circuits go on the PDB, because there is no official documentation. This is how the solder pads are connected.

Many people asked me to draw some connection diagrams for components such as motor, ESC, OSD, FC, RX etc. So here it is. With the full PDB we have three options:
- without any OSD
- with a simple OSD that measure battery voltage only
- with a MinimOSD
If you spot any error or mistake please let me know asap, I drew these diagrams at 1am with my eyes closed :)
No OSD

Simple Voltage OSD

MinimOSD

FC Power Options
It’s very flexible how you power your flight controller, depends on your setup, and wiring. Here are 3 options I can think of.
I am using option 2 in my quadcopter build.

Optional Voltage Regulator or Power filter
I use 4S lipo, and need 12V for FPV gear. If you decide to run a voltage regulator for 12V like I do, here is how you should connect it on the PDB.
For 3S, you can also just hook up a power filter there, to clean up your power source for your FPV equipment.

Mini Quad Build Detail
Once you figure out how you are going to connect your parts, the rest should be straight forward.
FPV Camera – Liquid electrical tape dip
Going to protect the camera better with liquid tape, and use my favourite way for a good angle tilt.



MinimOSD – Install the correct header pins
Most MinimOSD come with horizontal pins that are already soldered. But what we really need is vertical pins. So I needed to unsolder the original header pins, which wasn’t very hard to do.
Also make sure you have joined the jumper bridges on the Minim OSD, so that it can be powered by the 5V input. (you can power with 12V, but there is concern on overheating issue)



LC Filter and Voltage Regulator
I picked both power filter and voltage regulator up on eBay, costed me less than $5 total. I soldered jumper pins on the PDB to make it “plug and play”, easy for swaping around or replacement. I reviewed the voltage regulator before.
For the LC power filter you can also make it yourself.



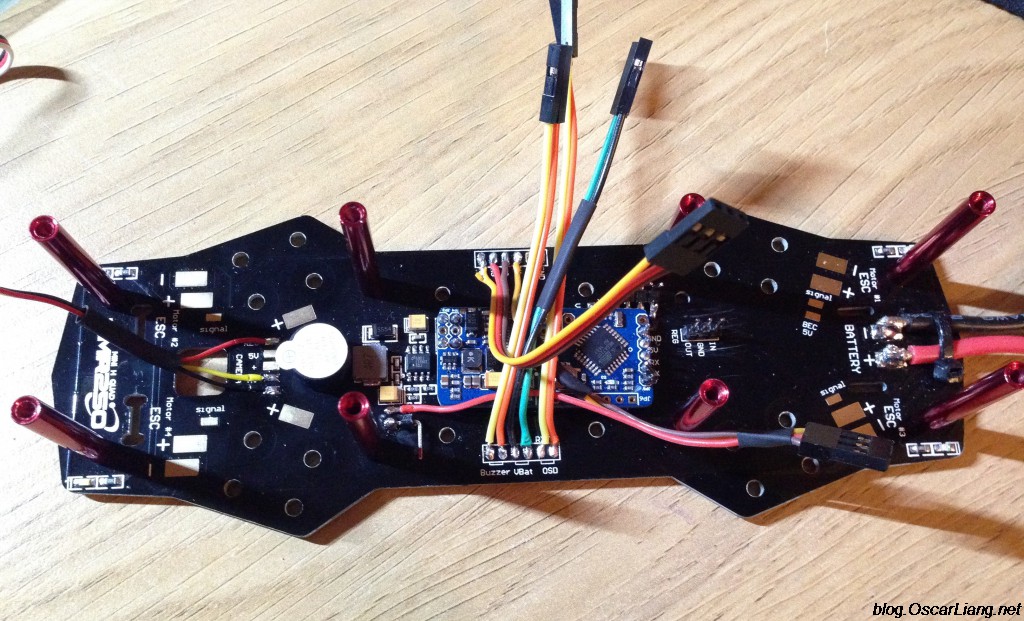
Soldering on PDB
Most people would solder wires directly on the PDB, but I prefer a few header pins wherever possible. They are just more flexible in some cases.

When soldering the MinimOSD, I recommend using the longer end facing upward like this, so you can still program/configure it later on with jumper wires/servo leads. Don’t forget soldering a pin for GRN/DTR as well as you will need it to connect to the FDTI programmer.


Soldering Flight Controller Connection Wires
All these wires will be connected to the FC. Note that I soldered a single header pin on the 5V ground output. It will be handy to have, such as for ESC programming and firmware updates. You can also use any other ground pins available on the PDB.


Installing Arms, ESCs and Motors
I am actually going to try the 3mm Thug Arms in this build, and not using the original 4mm arms. I have them laying around and they are a lot wider to protect the 2206 motors. I think the original arms are designed for 1806 motors, but I am sure they do just fine too.

Trying to keep it as tidy as I can. I am keeping the motor/ESC wires as I might move the setup to another frame in the future. Cutting them to a suitable length would make it cleaner and lighter.



Top Plate – where the VTX and RX goes

Update ESC firmware to BLHeli 14.0
With one wire interface, it is really easy to do!

And the Mini Quad build is done!




Total weight without battery is around 550g, and side by side with my EVO250 Mini quad.


63 comments
Hello Oscar,
Which size soldering wire to solder PDB and Flight Controller ?
Hi Oscar, I have a 12v pololu step up step down voltage regulator and an LC filter. I’m also using the camera (12v) and vTX that came with the ARF kit.
May I know what is the best way to wire up everything together with the PDB to achieve the best results? Thanks!
Hello Oscar!
I starting quadcopter piloting with a Cheerson cx 10, and a Hubsan X4, now i plan to build my first Quadcopter. What are you thinking this build?
Frame: Diatone Blade 150 Class Micro Racing Multirotor Frame Kit
FC: AfroFlight Naze32 Acro FunFly Controller
ESC: DYS XM10 10A Mini ESC OPTO w/BLHeli Firmware for High KV Motors
Motors: DYS 1306-3100KV BX Series Set of Two CW/CCW Motors
Props: GemFan Bull Nose 3030 ABS Propellers CW/CCW Set Green (2 pairs)
Battery: Turnigy nano-tech 1000mah 3S 25~50C Lipo Pack
Optional: TURNIGY 3A UBEC w/ Noise Reduction
Thanks your answer!
Hi, im not sure if I am to late to help but you may want to up the amps on your ESC because bull nose props tend to draw a lot of amps. You may be ok though, better safe than sorry.
Hi Oscar
Thanks for the great build log.
I’m building the same one as per your instruction.
But im using the Xracer F303 FC.
I’m confused about how to connect to the PDB Board.
Can you please help Me?
Especially how to connect the VBat (+- ) and the OSC (RX TX) to the Xracer
And what is the UART1 and 2 for?
Thanks
there is no VBAT on XRacer F3.
OSD TX/RX you can connecto to UART1 or UART2, these are the serial port.
Hi Oscar
I recently upgraded my ZMR to 6045 BN props from 5030 props but would I have to change the PIDs on my naze or should it be fine with the old settings. If I do need to change them what would the new PIDs be? (It doesn’t have to be exact)
Thanks, Chris
hi Chris, you will need to re-tune your PID and rates :) probably need to reduce them i think because it’s now a much more powerful setup.
Hi Oscar,
I have a ZMR250 that was built by someone else, but I am dismantling it in order to install a Overcraft v4 PDB (with LED ring, here: rcgroups.com/forums/showthread.php?t=2349727), a MRM MinimOSD with TeamLegit mods, and Frsky D4R-ii.
The quad already has a Dragonfly32 Pro FC, ZTW Spider 12A OPTO esc, and SunnySky x2204s-16 motors, Sony PZ0420 camera, and Fatshark 250mw vtx.
I am new to building quads, my soldering skills are ok, no problem interfacing with computers – but I hardly know where to start! I picked up the OC v4 in order to easily mount the minimosd, soldering those required pins to PDB should be cake, but after that questions…
– The FC wiring diagram you made is the best piece of info I have found online for this build! But it doesn’t correspond well to my Dragonfly32 Pro version (still naze32). Can you help me out here? static.rcgroups.net/forums/attachments/5/1/4/6/3/2/a8512193-113-df32_connections.jpg
– Should I setup as PPM? Looks like I should be choosing PPM. I am pretty good on my Taranis, but have just done umx, planes, helis, toy quads before – what does the typical programming look like for this setup? How does everything get sent to just the first input on FC? Is that really all the wiring?
– I want OSD to output timer, RSSI, battery voltage, Altitude and Compass but I am having difficulty finding the simplest method to route all those to OSD. I have read your RSSI via PPM instructions, but with the KV mod minimOSD would it be better to go another way?
– OC v4 PDB has pads for ESC +, -, and signal on 3 motors and another + for motor 1. I see some people following this arrangement, but others run the signal wires back to FC and skip PDB – why?
– Do I need to run the FC and RX off of a separate 5v UBEC? Which pads should that get fed from on PDB? Do I need to add all the filters and regulators you have shown here, the OC v4 PDB supposedly has a fpv filter and 5v bec built-in.
– The programmable LED ring needs to be hooked up to channel 5 on FC, if this is just signal then where should it pull power?
I am just reading everything I can find online about these particular products, but so far the pieces have not clicked for me… the documents and videos I find just raise questions – cannot find anything quite clear enough!
Hi Oscar,
On the FC, can the 5 V and GND pins for ESC really be used as inputs to power the board? Thought these were outputs based on what the manual says.
Hi Oscar , very interesting and nice blog here…i’ve a question about flight controller…may we use a naza M lite or M V2 as FC..? and in case of this possibility will be ok, how to wire all the components…?
Thanks to you, and fly safe
Philip
mounting it would be a bit tricky as this board is designed for 33mm square FC like CC3D or Naze32…
Hi Oscar,
I need some advice. I wired up my zmr250 with a frsky dr4ii and minim osd and can’t get it to show me both the osd and the taranis telemetry data. I think it has been working fine until I switched to betaflight.
Here’s my problem: the osd shows no data even if it’s armed. Frsky rx is connected to the telemetry pins on the side of the naze32. The minim osd to the rx/tx pins on the upper side. When I’m disconnecting the frsky telemetry the osd works fine, only the artificial horizon doesn’t show up.
My wiring diagram is exactly the one you are using in your zmr250 v2 build.
Guess it’s something about serial ports but I have no clue how to solve that problem. I didn’t set up any serial ports in betaflight. Tried it but I didn’t change anything.
Any hints are much appreciated!
Cheers and thanks!
it would be easier if you join my facebook group and upload some pictures of your Cleanflight flight config… espeically the port tab.
Hi Oscar,
can you tell me where to connect the audio cables from my tx to the board ? I use a aomway tx 200mw, my version has two cables 1.
5v, gnd, av, audio l, audio r. The second cable has gnd and + batt.
i don’t think there is trace for audio on the board.. you might need to run a cable for that
Hi Oscar read through your build log thank’s allot helped out allot. One question I have and found a few different answers but thought I would ask. On the esc signal and ground wire do I just solder the ground wire to the ground motor wire or just leave it off? Again thank’s allot for the build log.
HI Chad
what do you mean by “ground motor wire”?
generally speaking, ESC GND should go to the GND on FC, or GND on the power source of the FC, just so the ESC signal from FC has a common reference.
Hi Oscar,
Thank you a lot for this great build log – motivated me to buy one as well which I am building right now.
Unfortunately I am encountering strange issues with 4s power:
I am using the”mini” regulator from fpvmodel and everything works fine up to 15,9v, stable 5v and 12v power, above 15,9 v I suddenly have neither 5v nor 12v, nothing working…
Could this be a faulty regulator? And if yes, why does it affect BOTH independent regulators??
Totally confused…
Hi Oscar,
great tutorial & wiring schematics. There is one mistake in the PPM wiring, though: Pins need to be connected to D4R-II in reverse order.
I’m at 90% with my 250 build ;-)
Regards,
Reinhard
Hi Oscar
Like everyone else said, great build log.
I found your pinout the most helpful and saved me wasting time.
I’ve never tried a FW update to all esc’s once they are wired in.
Can you elaborate on how to do this or post a link to where you figured it out
I didn’t attach my ESC ground wire as the server ground and battery ground are shared, which I don’t think should be an issue.
Thanks
Hi Oscar,
I have some issues minimosd(kv osd).
I use Immercerc 600vtx and sony 600vtl (5-20v).
Also I use 4S 1800 65C.
I don’t use any reg because vtx and camera handle 4S bettery.
When I powered my 250 in 30 second It looks great. I can see osd work.
But 30sec later, buzzer sound strange and camera shut down.
When I using 3S system It is no issues at all.
Do you have any idea?
Thanks,
have you got VBAT enabled in cleanflight? maybe voltage drops too much, which also affects your VTX/Camera?
Thank you for your reply.
Yes, i did use vbat feature. Howerver i did disable vbat and direct conect volt to osd, but is had same issues. I,m wonder why voltage drop so much? 5v voltage have problem I guess.
I have had this before and it was the 5v regulator not handling the required current. I bypassed the pdb boards 5v used a dedicated 5v 2A bec in the end and it all worked fine.
Hi Oscar,
I was looking at the zmr250 vx pbd and see soldering pads on both sides, so could one wire the battery attachment on the bottom between the two boards without effect? I am thinking i might want to place some esc between the bottom pdb and bottom plate and do its concections there with just clean motor wires running down the arm, every other build i see has all the wiring done on the top of the pdb does it have to be that way ?
not sure if you have purchased this frame already, FPVmodel has released a new design that the ESC soldering pads are also available at the bottom of the PDB.
Hi Oscar,
just in order to correctly understand the Power FC options
ad Option 2 (no ESC BEC) : all wires of an opto esc are connected to +,- & signal (red servo wire is removed, and Gnd is soldered together with ESC ground to ground pad ?
ad Option 3: does the red arrow in your drawing mean that red servo wire of ESC#1 needs to be solderd to BEC pad? all other ESCs just need plus minus and signal (so same as option 2).
thanks in advance
– klaus
yes you are right :)
The “ESC#1 BEC pad” is connected to the “FC BEC pad”, so when you have 5V at the “ESC#1 BEC pad”, you can power the FC from the “FC BEC pad”
Hi Oscar
Are you still running the FPV Motors after the bell issue – did they update them / send you new ones? Also – do you notice lack of damped light blheli settings or is it not a huge deal? Im going to do a similar build soon and wondering what motors…thanks!
Hey Steve
yes still running them. They sent me a new motor, but it looks identical to the old ones, not sure what’s been changed/improved, maybe just better quality control?
If you are running 6 inch props, with/without damped light is very day and night, but on 5 inch props the diference is smaller since the change of RPM is quicker anyway… I haven’t tried turning damped light back on yet as i got some more testing to do and cannot afford to burn those ESCs…
Hi Osar,
Do you have an extra decimal place in your displayed Integral PID settings? Not familiar with PID tuning but noting that they are a factor of ten less than the defaults.
sorry yes you are right, i put an extra zero in I gain… should really be
Roll P 4.0 – I 0.036 – D 30
Pitch P 4.6 – I 0.036 – D 36
Yaw P 10 – I 0.065 – D 1
Wondering if I can get some assistance on my problem. I have mine all wired up with Minimosd but am getting no video. The lights are on on the minimosd. I know the camera takes 12v and is being powered from there. The TX is lit up and on the right channel (as well as goggles receiver) but still getting just a blank screen.
I believe I flashed the minimosd (using arducam OSD -per mochaboy videon on youtube) . Any help or things to check would be appreciated. Here is a brief pic of some wiring..
http://imgur.com/LTpzAIu
did you tested the FPV setup before putting it on the frame? (just VTX/VRX/Camera?
I cannot see very well in that picture, could you tell me what pins the camera is soldered on? How about VTX?
thanks
Oscar
Hi Oscar
I’m hoping you can give me a little advice here!
I pieced together a ZMR250 using this V2 kit, and have it built up to the arms, motors and FC. The one problem – none of the motors will spool up! I’ve tried calibrating in CleanFlight, and I get no response from the ESCs. I’ve tried with the radio and I still get nothing. I’ve soldered each ESC/wire just like it shows in your tutorial.
I have tried the motor test in CF and with the box checked and battery plugged in, none of the motors work.
The ESCs do the 3 tone start up beep, and the accelerometer on the FC seems to work fine. I flashed the Naze to 1.8 as 1.9 was giving me a lot of grief with flashing lights.
Any advice you can give me? Would love to get this thing flying!
Thanks,
Jeremy
Hi Oscar
Turned out to be Oneshot that I kept enabling but the ESCs hadn’t been flashed to support it yet! Thanks for your time!
oops! glad you got it sorted!
sounds like tricky problem, would be easier for you to join the FB group and upload some picture of your setup. http://www.multicopterfpv.com
Hi Oscar
Thank you for this wonderful build log- I’m looking to make my first build here very soon and I’m going to copy your build exactly (hope you don’t mind). I’ve never done anything like this so i’m pretty intimidated. I hope you don’t mind if i ask a few questions?
1) What other items should i have to complete this build aside from the main parts listed? I see some blue ‘pad-like’ things on top of the quad. are those pads for the battery? What other small things should i make sure to have on hand?
2) I realize you were using a few parts from your previous build on this one. If you were starting from absolute scratch, would you make any changes to your build list?
3) i’m still learning about 3s vs 4s power and reading your nice resources. Might i just ask this- with the components listed, could I simply run a 3s lipo if i wanted to ‘tone it down’ for a bit until my skill grows? Then simply switch batteries and i’d be good to go for 4s?
4) before i tackle this- is there any bits of wisdom / tips you can give that you wish somebody told you.
thanks!
And another question, on the picture post this phrase “Don’t forget soldering a pin for GRN/DTR as well as you will need it to connect to the FDTI programmer.” it is clear they you soldered 3 pins (on the picture just above voltage regulator pins) but it seems you didn’t use them. What is their purpose??
I am using them, they are for connecting my VTX => REG (12V), OSD (Signal), GND…
Hi Oscar, I am planning to use pololu 12v regulator. Would you suggest to get LC filter for it like you did?
Thanks!
Alex
doesn’t hurt to get one. :)
Hi Oscar, Great build. Did your ZMR250 frame from FPV Model come with the nylon screws to secure the FC to the nylon standoffs?
Hi Miguel, yes it came with nylon spacers, bolts and nuts for FC.
Hi Oscar,
Great guide. I am assembling quadcopter similar to this one (naze32 and Frsky D4R-II). I want to add Turnigy 3 in 1 discovery signal (mostly to use lost signal feature F1 + F3) The manual says I should connect B to ESC and C to Rx. Am I right that I should plug one of the ESC endings to B (not to naze32 pins) and then plug C to Naze 32 (which is connected with servo to Rx)?
Here is link to manual: hobbyking.com/hobbyking/store/uploads/535558890X1308475X46.pdf
Link to buzzer: hobbyking.com/hobbyking/store/__60454__Turnigy_3_In_1_Battery_Monitor_Signal_Loss_and_Lost_Airplane_Alarm.html
Hope you can help me, thanks in advance
-Roman
I am not sure 100%, the diagram is very confusing, but i think what they mean is, you need to power the Turnigy 3 in 1 by the ESC, and slit the throttle signal from RX, one goes into the Turnigy 3in1, and the other goes to the FC ….. it says ESC in the diagram but i think that’s for fix wing planes, in multicopter you will be connecting RX with FC….
I thought about this problem for a while. Is it possible that 3 in 1 should be put between Rx and FC? The signal from ESC anyway goes through FC and it will be connected to Rx, but I`m not sure how it will affect naze32, 3 in 1 will be connected to LiPo, I afraid that in could possibly fry FC.
Hi Oscar,
I am disassembling my ZMR and going to build my ZMR V2 following your guidelines. :)
I wanted to share with you something I usually do to keep my builds as clean as possible.
I was quite annoyed with the connectors on the naze32 that normally sit on the side on the frame.
It is possible to solder the pins under the naze in a way to keep hidden the ESC’s signal wires,
the 5v and ground wires.
Better than explanations, I have upload two pictures…
Front: dropbox.com/s/qhv7e7cheevn0jc/%20naze32_front.jpg?dl=0
Back: dropbox.com/s/pf5vynzptfhrfi1/naze32_back.jpg?dl=0
One connector is used for 3 ESC’s signal wires and another for 1 signal wire, 5v and ground wires. They are parallel to the board and there is still plenty of room underneath when the board is fixed to the frame…
Regards,
Manu
thanks Manu :)
very clean idea!
Hi Oscar,
I am new to this whole FPV QuadCopter and even QuadCopter in general. I have spent about 50 hours just research into everything about QuadCopter and i think i am ready to build one. I have chosen these parts, can you confirm that they will work with each other and if they are good?
Parts :
Frame – RCX H250CF-3K FPV Quadcopter (3K Carbon Fiber / Barebone Frame)
FC – Naze 32 Full (for future projects)
Motor – RCX H1806-6 2400KV
ESC – HobbyKing 12A BlueSeries Brushless Speed Controller
Props – Gemfan 5030 Multirotor Propellers
Radio – Turnigy 9X
Battery – ZIPPY Compact 1800mAh 3S 25C Lipo Pack
Please reply ASAP.
Thanks a tons!!
looks good!
I would recommend getting 5040 ABS propellers or even 5045 :)
HI Oscar,
This manual should be shipped with the frame. Wonderful job.
Thanks !
Manu
:) maybe they should :) thanks !
looking at your diagram for FC power, option 2, do you mean To FC in the middle there? It says To ESC but that doesn’t make sense as no where else on the diagram do you mention the FC you’re trying to power.
oops… yes :)
corrected now thanks for heads up !
Hi Oscar,
Nice documentation, very much appreciated. Like you said, documentation provoded is not very good. A few questions to hopefully help in my decision making:
1) Why did you decide to go with the SN20A escs and flash them to BLheli rather than just buying the BLheli version? In general why would someone choose one over the other?
2) Was the 12V regulator also required to run the LEDs? I plan on going 4S and have a 5V camera so I am not sure if I need the 12V regulator or not.
3) I have a spare CC3D straight pin and a spare CC3D atom with angled pin (impluse ebay buys). Do you see any advantage on using one over the other? You used a naze32, right? Am I missing out on any features by not using one as well?
Thanks in advance!
1) because they are light and cheap, went for BLheli because of the easy to use GUI, and I used BLHeli a few months now having good results. These ESCs come with older version firmware, latest is 14.0. You don’t have to flash them if you don’t want… still works
2) no, LED runs off the battery directly, works on 3S/4S. it has an onboard 5V regulator, so your camera can be powered by that.
3) for CC3D/Naze32 comparison, search that on google you will find my post about it. Sorry i don’t use CC3D atom so can’t comment on it. But the regular version might be easier to mount i guess…
Hi oscar,
I was wondering where you got the extension for your FPV antenna
-Caleb
hobbyking has them.
Hello Oscar. Great writeup. I am wondering if the wiring for the MinimOSD is correct going to the PDB? It looks like you have the + and – switched as well as the Rx and Tx going to the PDB. The pins on the PDB should line up with the OSD pins correct?
You are absolutely right Humboldt710! silly mistake there, shouldn’t stay up late at night :) corrected now.
Thanks for the heads up and thanks for dropping by :)