I took a 2-year break from fixed wings, it’s about time for a new build. Portability and efficiency have always been the most important considerations in planes for me, and the Hee Wing T1 Ranger ticks both boxes. In this review I will take a look at the build quality of the Ranger, and show you how I build it without a flight controller just for manual flying.


Table of Contents
Where to Buy?
There are two versions, PNP and KIT. You can also choose between grey and white foam – the grey foam is supposedly tougher but slightly heavier.
Buy the PNP version here:
- AliExpress: https://s.click.aliexpress.com/e/_DB4nGIN
- FPV24: https://oscarliang.com/product-1nn1
- GetFPV: https://oscarliang.com/product-a0av
- NDB: https://oscarliang.com/product-jeth
- BuddyRC: https://oscarliang.com/product-pmro
Buy the KIT version here:
- AliExpress: https://s.click.aliexpress.com/e/_DkqEA4D
- BuddyRC: https://oscarliang.com/product-2ifx
Long story short, I recommend the PNP version if you want an easy build.
The PNP version includes most of the electronics and parts, like motors, ESC, servos, power distribution board (PDB), LED, propellers etc. They also have done most of the assembly for you, so there’s not a lot of work when building it. It would probably only take someone experienced an hour (or even less) to build.
The KIT version only includes the very basic hardware, it doesn’t come with any electronics.
Originally, I bought the KIT version because I already have many spare parts I can use like ESC, motors, props etc, so I thought I could save money by going with the KIT version. To my surprise, nothing is assembled and many essential parts like the quick release accessories (the connectors for the ESC/motor/LED) and PDB are not included.
Instead of buying all the missing accessories and spending a few evenings putting them together, I decided to just order the PNP version. So now I have two Heewing T1 Ranger kits :D Oh well, I guess it’s nice to have some spare parts right? :-) (Update: turned out I was right, I broke some parts on my maiden flight haha)
Closer Look at the Hee Wing T1 Ranger
The Heewing T1 Ranger is a twin-motor plane with 730MM wingspan.
I absolutely love how portable the Heewing T1 Ranger is, I can take the wings off and remove the tail, and it fits it in my backpack perfectly (that’s the Auline FPV V2 Backpack by the way).

Assembling it in the field is a 2-minute job.

The T1 Ranger is similar size to my beloved S800, but at only half of the weight. The Ranger Flight performance is great and very enjoyable, I feel like it’s faster and more stable than the S800.


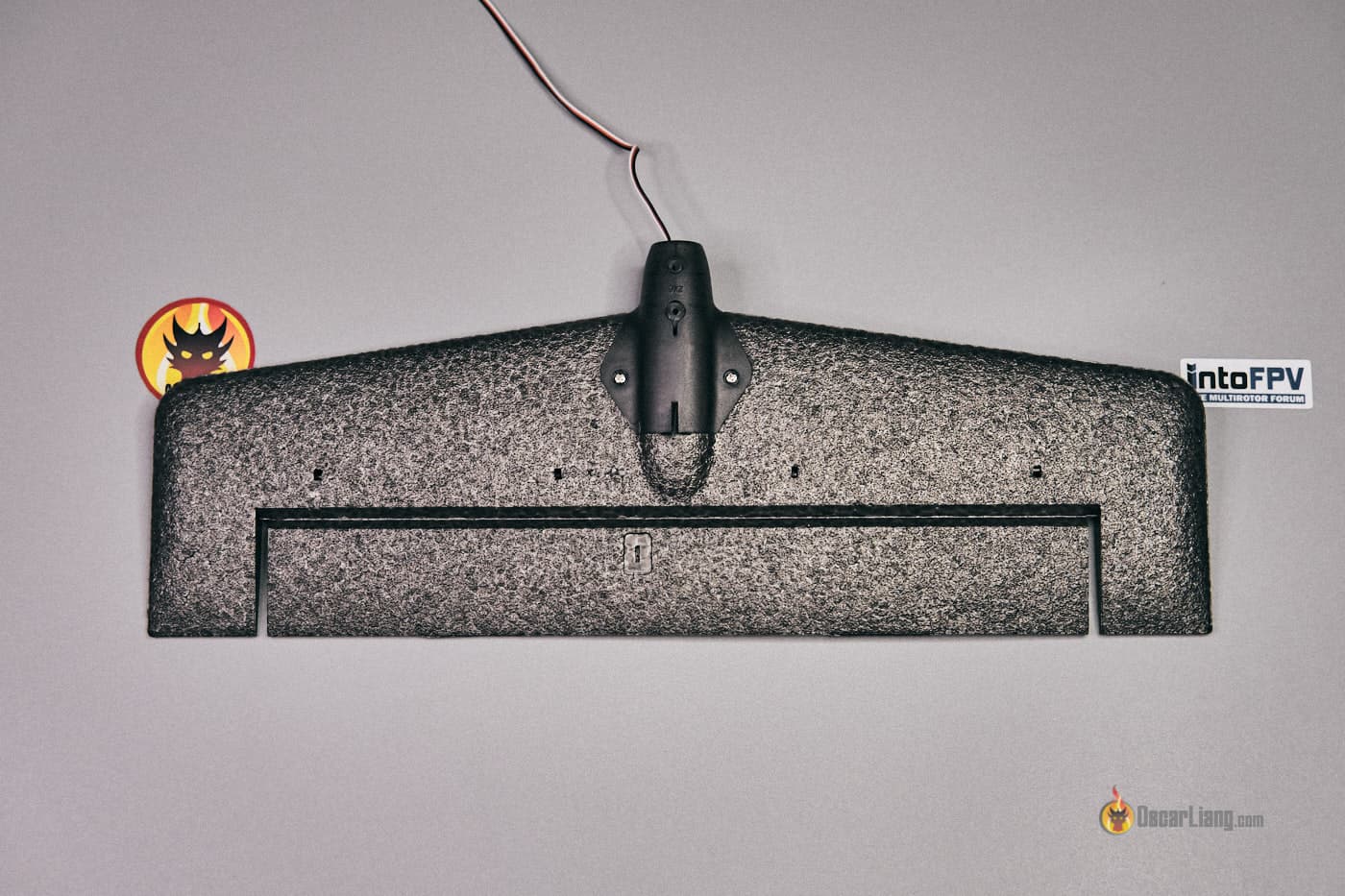
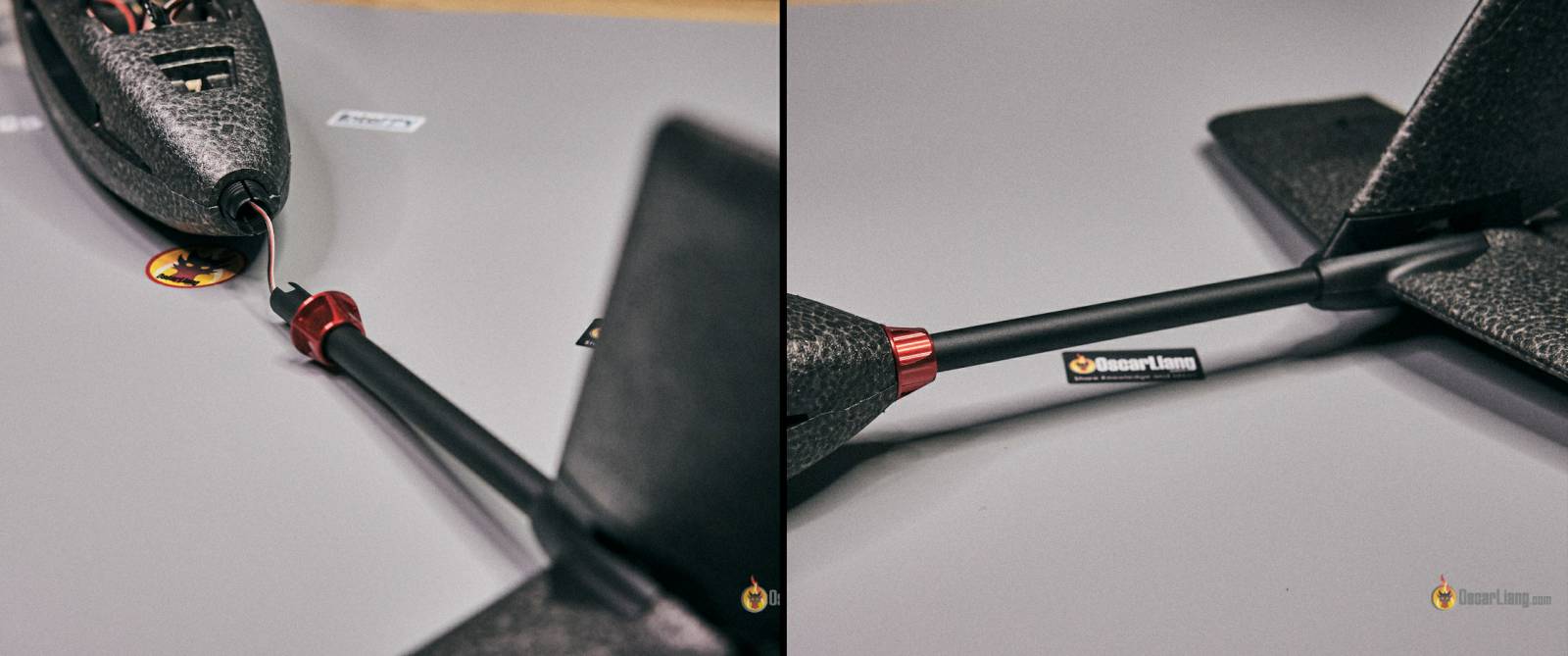
The Heewing has a unique and innovative tail boom design, it’s secured by a red aluminium compression nut and can be easily removed.


The foam is hard and good quality, you can apply a lot of pressure on it and it still holds the shape well. I actually broke the aluminium tail boom while the foams are still in perfect shape.
Note: the darker color foam is denser than the white foam, so the darker foam is stronger but also heavier.


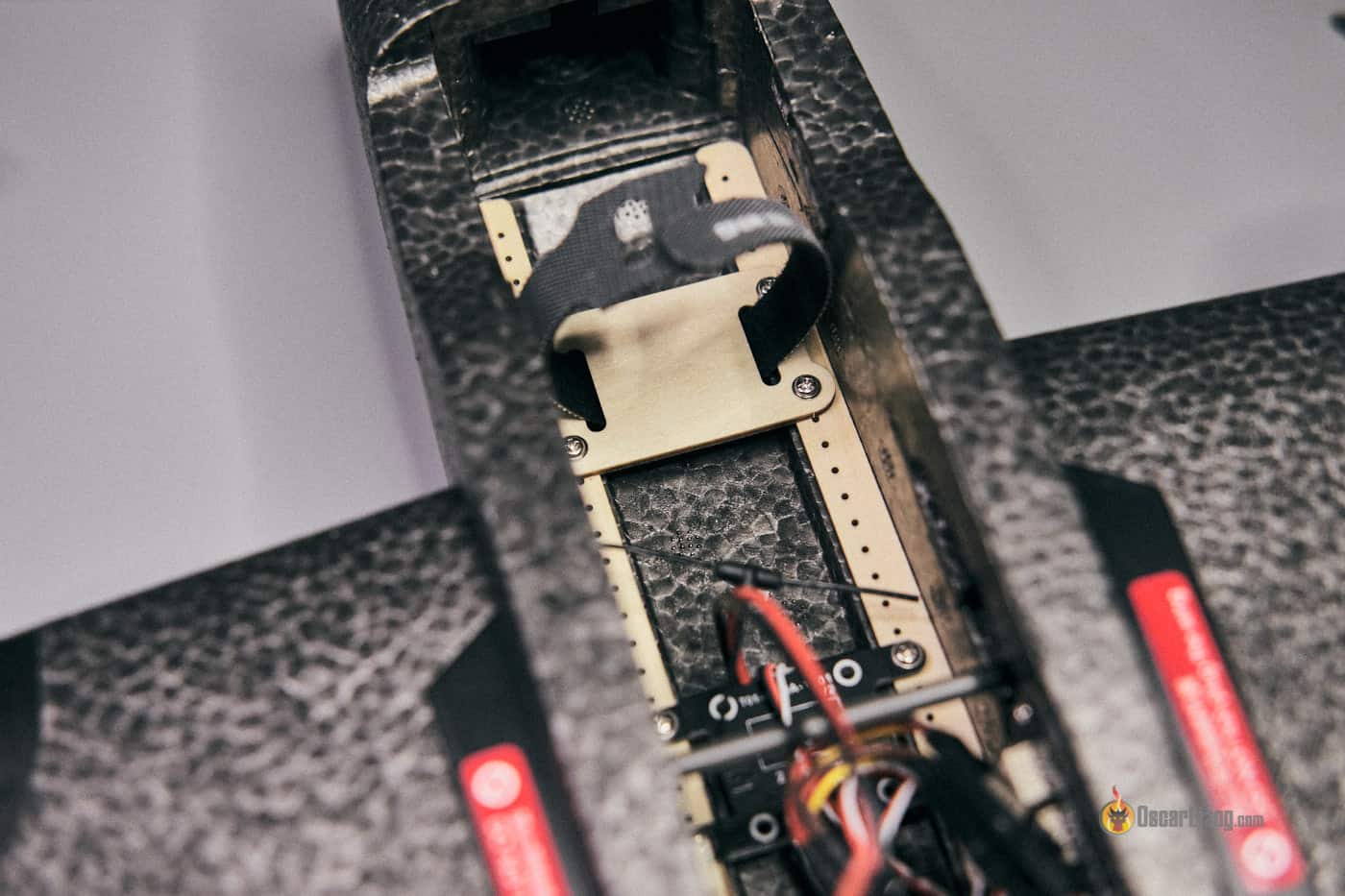
Spacious fuselage.

The internal space of the fuselage measures 190mm long, 50mm wide, 35-40mm deep, you can easily fit a 4S1P 18650 Li-ion pack or a 4S 1500mah LiPo in there with lots of space left.

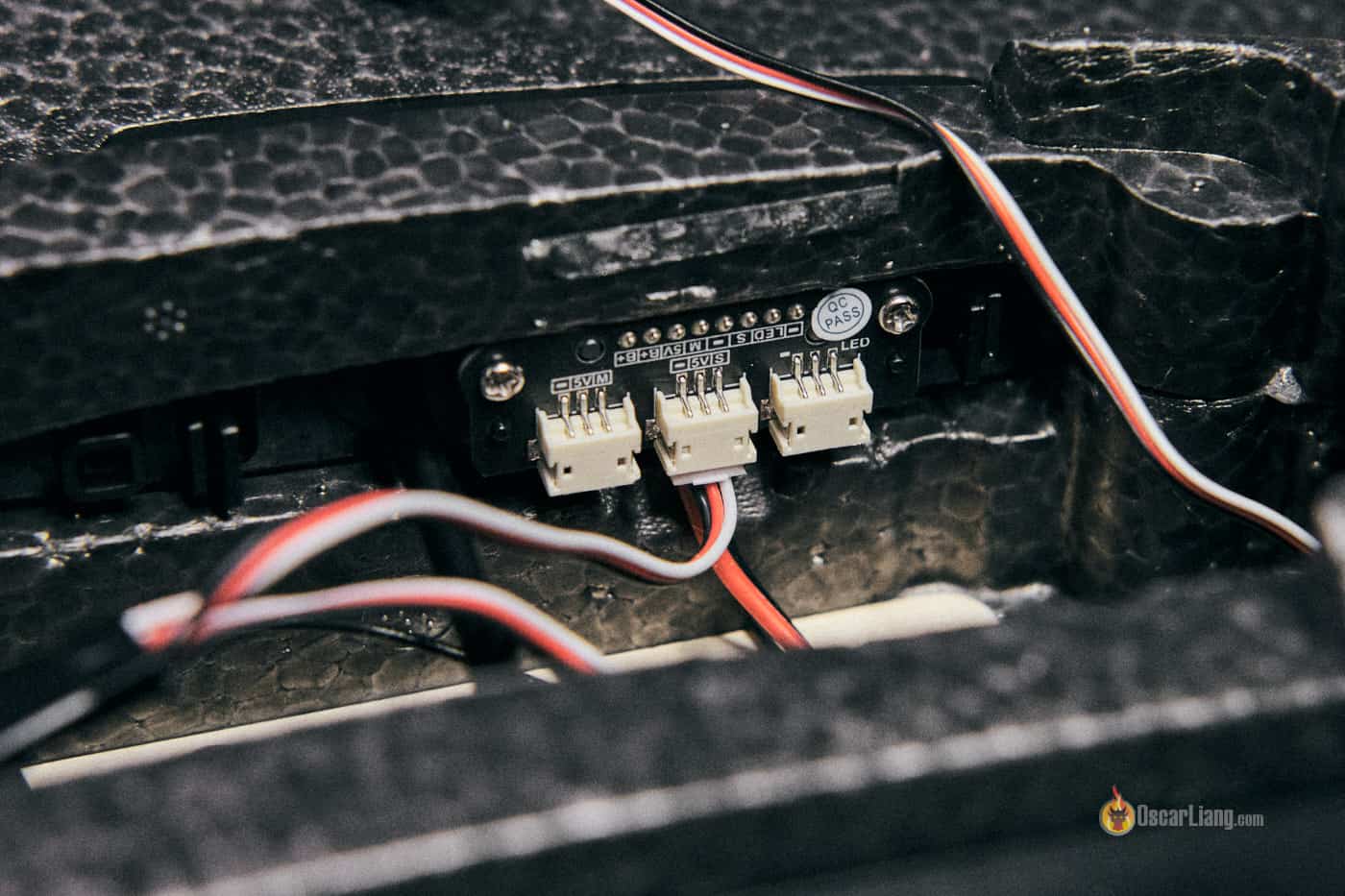
There’s already a power distribution board installed inside, it splits the power for the ESC’s on both sides. It also has a 5V 3A BEC for powering your servos and and radio receiver. It comes with an XT60 connector.

There are quick release connectors on each side of the fuselage for connecting the ESC, servo and LED power/signal to the wings.

It’s super easy to install / remove the wings. To install, simply push the wing into the fuselage, the connector just snaps into place. To remove the wing, just push the clip inside the fuselage and the wing will just come off.

M stands for motor (ESC signal), S stands for Servo (servo signal).

The canopy clips onto the carbon rod in the fuselage, very cool and convenient design.

Motors, servo and LED are all pre-installed in the PNP version. All the cables are tucked in the foam, very clean design. The wires are not glued, so you can still remove it easily for repair or upgrade.


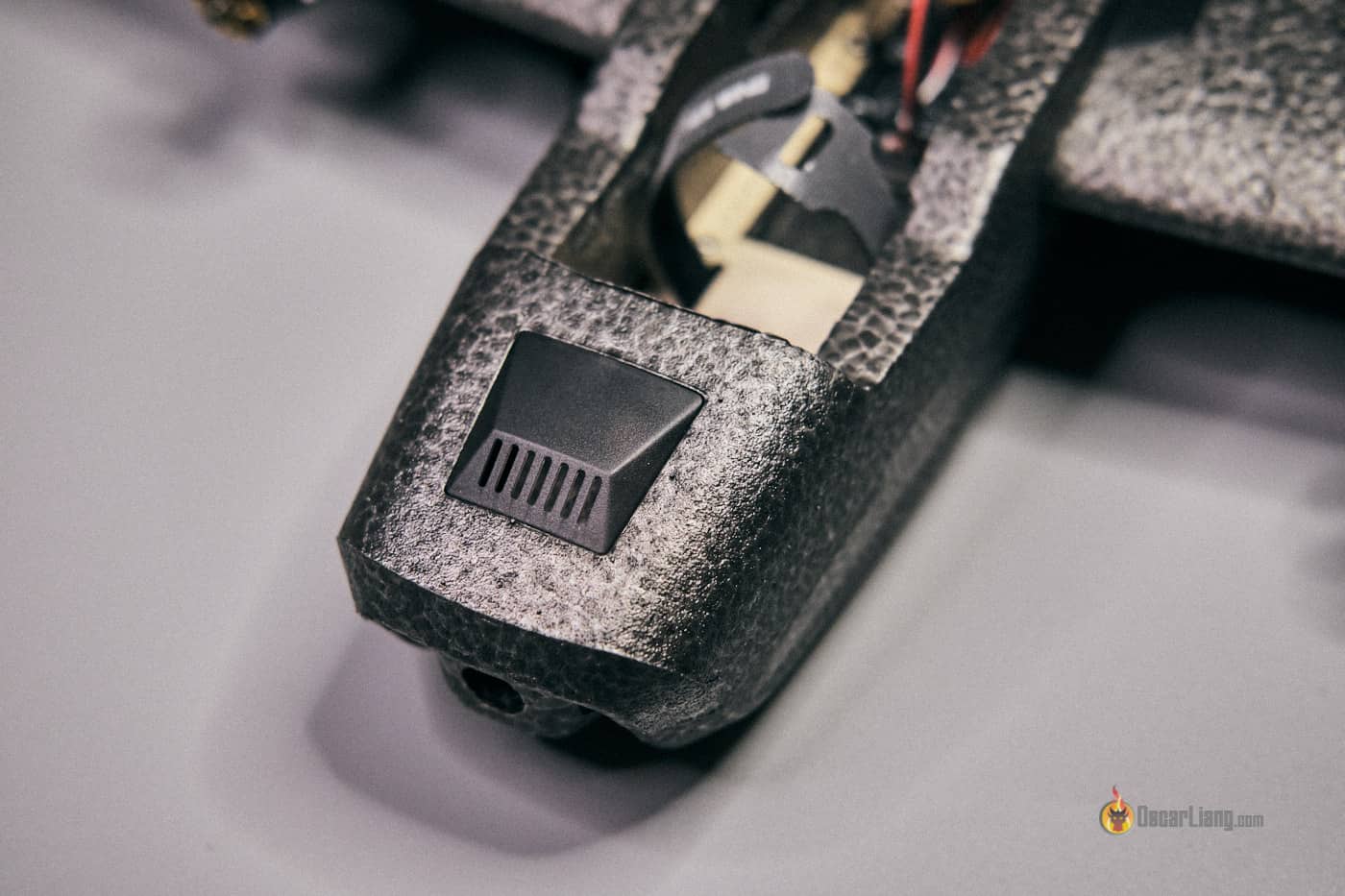
The servo is well hidden inside the plastic cover, again, a very neat and clean design.

Removing the cover exposes the ESC. Pro tip: if you wish to reverse motor direction, you can just desolder two of the motor wires and swap them around.

The servos in the wings and tail are already installed and centered out of the box.

The tail servo has much longer wires (400mm) vs the wing servos (180mm), if you are getting replacement or upgrades, make sure you get the one with the correct cable length.

Assembly
Tools you will need are Phillips screwdriver, E6000 glue, servo tester. Take a look at the common tools you might need for building RC planes: https://oscarliang.com/fpv-tools/#Tools-for-FPV-Fixed-Wings

No instruction manual included in the box, you can download the official manual here: https://www.heewing.com/pages/assembly-guide-manual-download
I just watched this 5-minute video and I already have a pretty good idea how to assemble it.
First, massage the hinge on both the tail and wings so they can move more freely, they came quite stiff and hard to move.

The T1 Ranger comes with 4 sets of servo linkages (all the same length), you will only need three (1 is spare).

Install the push rods.

The servo should be centered correctly in factory, but just to be safe you should check using a servo tester. Get a servo tester from here:
- Amazon: https://amzn.to/3HE4Fmb
- AliExpress: https://s.click.aliexpress.com/e/_DCQGVRj
- Banggood: https://oscarliang.com/product-xz4q
Connect the servo to the servo tester and set it to 1500 (center point), the servo arm should stop at 90-degree, if not, remove the screw and adjust the arm.

Push the pushrod through the most outer hole in the servo arm and linkage.

The control surface should be level with the tail, if not, remove the linkage and rotate the pushrod to shorten/lengthen it.


For reference, here’s how I setup mine.

Push the tail boom into the tail.

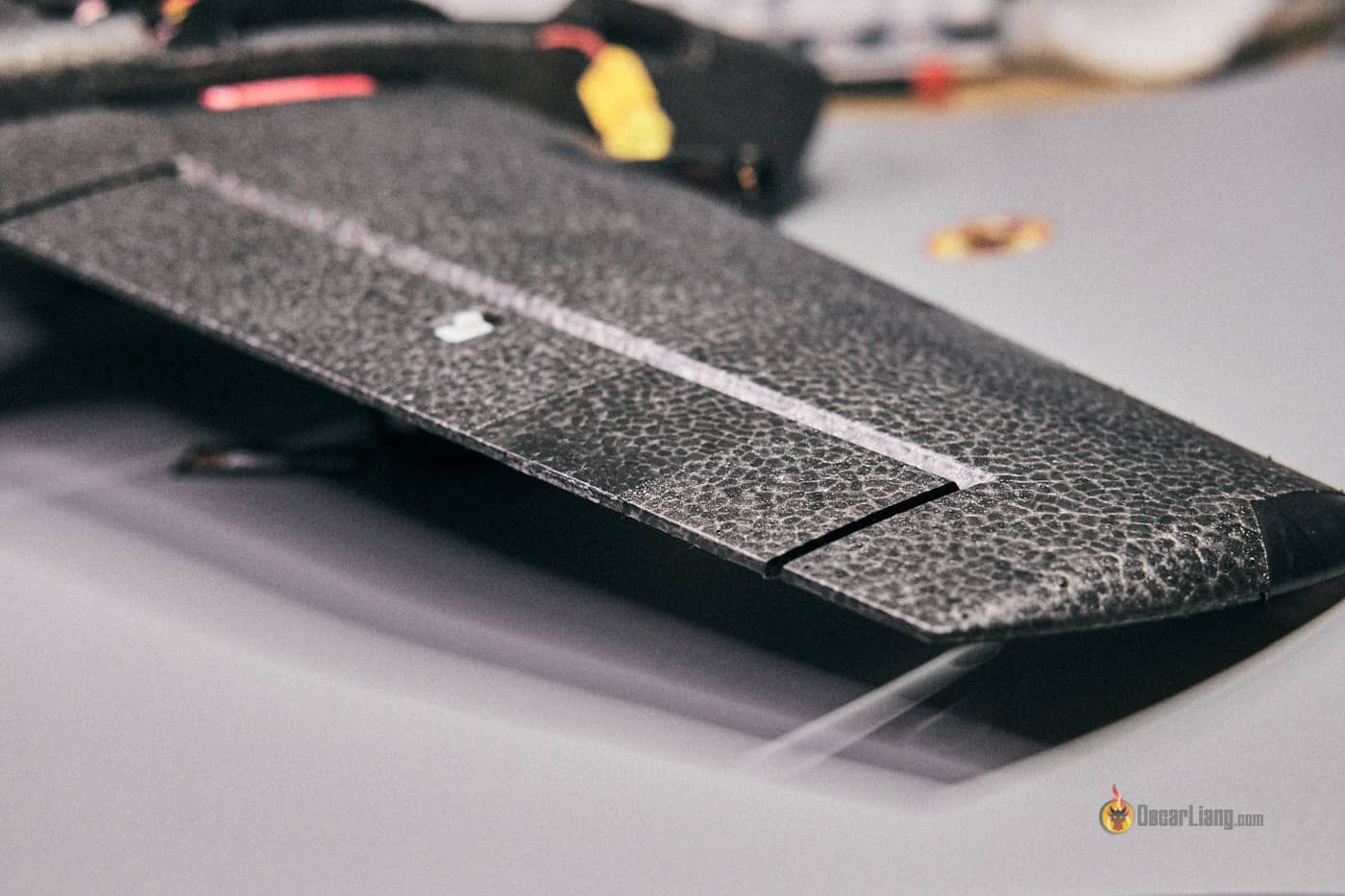
Now install the vertical tail fin stabilizer, push it into the slot and it should snap into place.
Apply the screws, next to the holes are the lengths of the screws required, very thoughtful.

Push the tail boom into the fuselage with the red lock ring in between. Push it all the way in until the tail boom can’t turn anymore, then fasten the lock ring.
Put the 4mm carbon rod through the fuselage.

Connect the wings to the fuselage.
Again, center the servos on the wings with the servo tester, then install the linkage.

Make sure to apply glue to the linkage lock. I am using E6000 for this (product page: https://amzn.to/3lAn480 ).

The control surface should be levelled with the wings, if not, remove the pushrod, rotate it to adjust the linkage length.

For your reference, here’s the wing servo linkage in my ranger.


Install the handle on the front canopy.

The front and rear hatches closes like this. The front hatch holds on to the 4mm carbon rod.

You can install the front ventilation cover, it stays on pretty well without glue.
Mounting the props – the motors spins outwards, so the props should be installed like this:


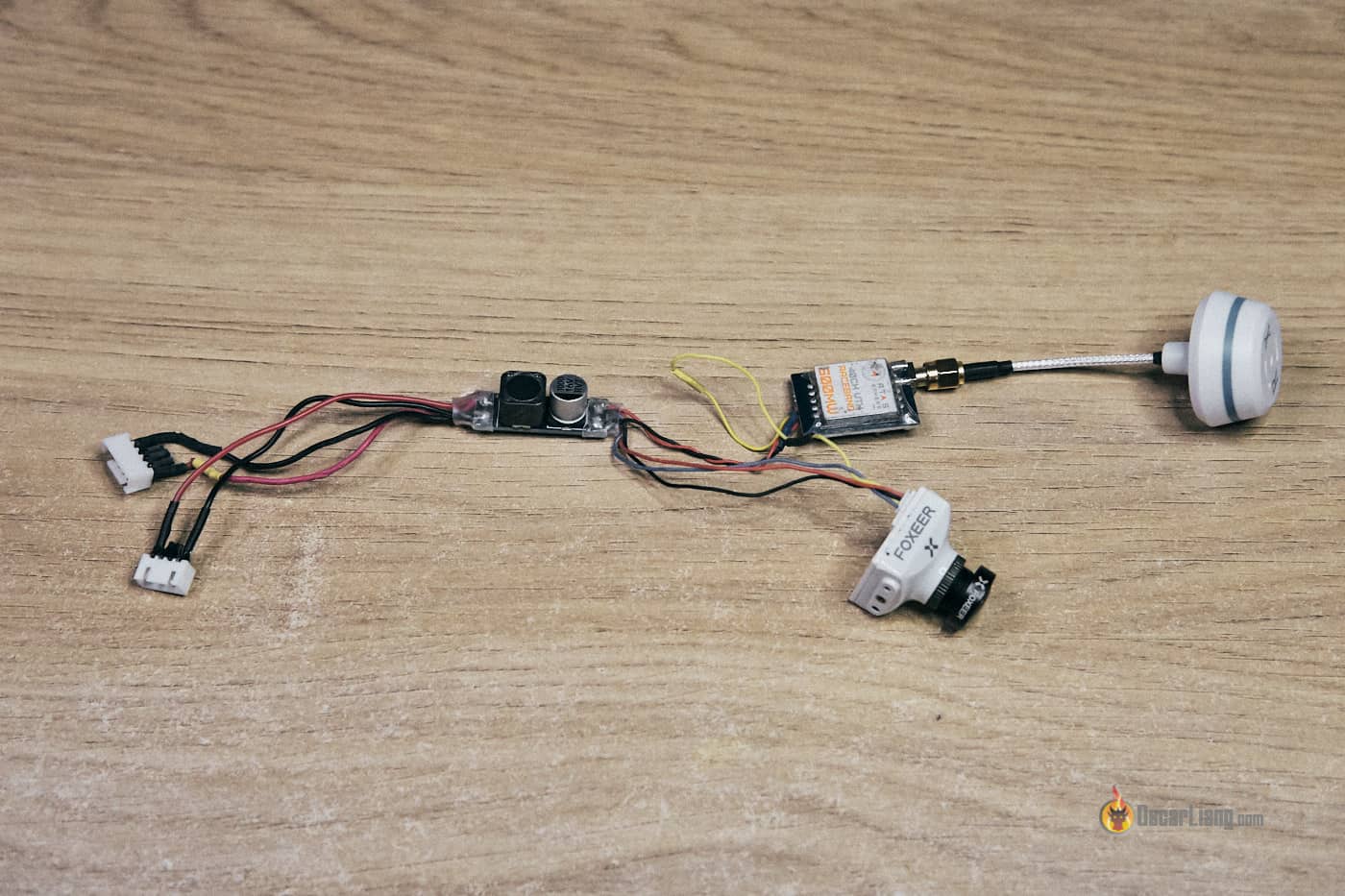
For FPV I am just using a setup from a previous fixed wing. The VTX connects directly to an FPV camera, powered from the balance lead of a 3S or 4S LiPo/Li-ion battery. It has an LC filter for power filtering which is optional. The camera (Foxeer Falkor) has voltage sensor so I can see the battery voltage on the OSD screen. It’s a very basic setup, you can use any VTX/Camera as you see fit.
To install the FPV camera, I couldn’t fit it inside the fuselage because it only supports micro size camera (19x19mm), mine is a full size camera (28x28mm), so I had to mount it on top of the front ventilation. Using a zip tie to secure the camera mount bracket.
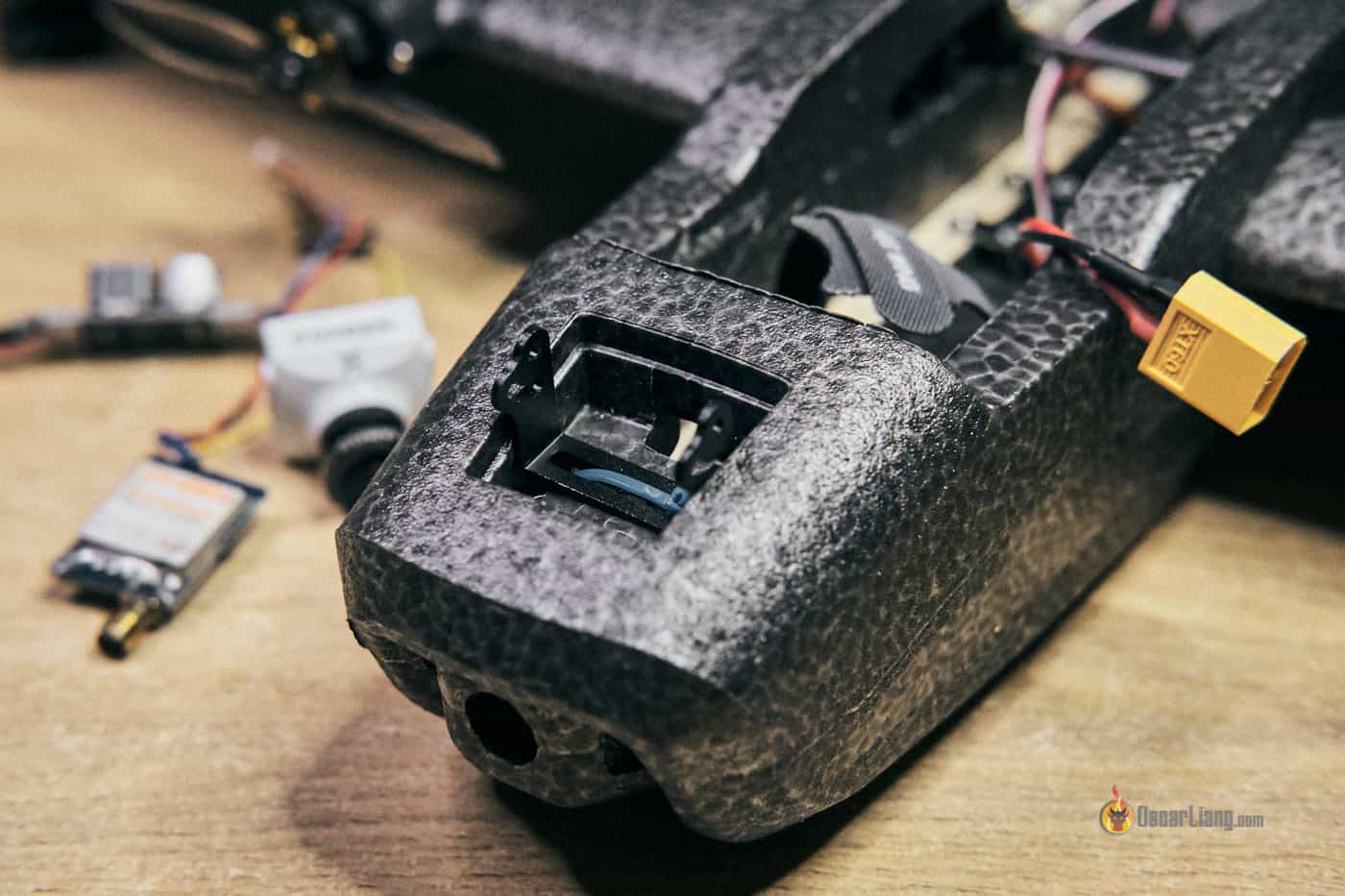
It doesn’t have any protection for the FPV camera, but I quite like this setup because it’s clean and I didn’t need to modify the foam at all, and there’s no need for 3D printed parts.

It’s up to you if you want to install the landing gear (wheels), I will be launching the plane by hands so I will leave them for now. Here’s how to install the landing gear.

With 3S 1600mah LiPo it weighs about 520g.
Hold the plane by the front hatch handle (the front bit), and make sure the plane is level, this mean the CG (center of gravity) is spot on. It the plane is tail heavy it’s going to be hard to fly. You’d rather have a front heavy plane than a tail heavy plane. You can shift the battery to adjust CG, or add some weight to the front if the battery isn’t heavy enough.

First Flight

Maiden flight was a bit rough, it went out of control as soon as it left my hand as rates were much higher than I expected, and it smashed into the ground.
What’s rates? For those who are new to wings, rates are how much the control surfaces can move, when rates are too high it makes the plane react too aggressively to stick movements and there’s no fine control.
Here’s the flight footage of maiden flight.
Damage report:
Broken aluminium boom tail.

Snapped carbon rod.
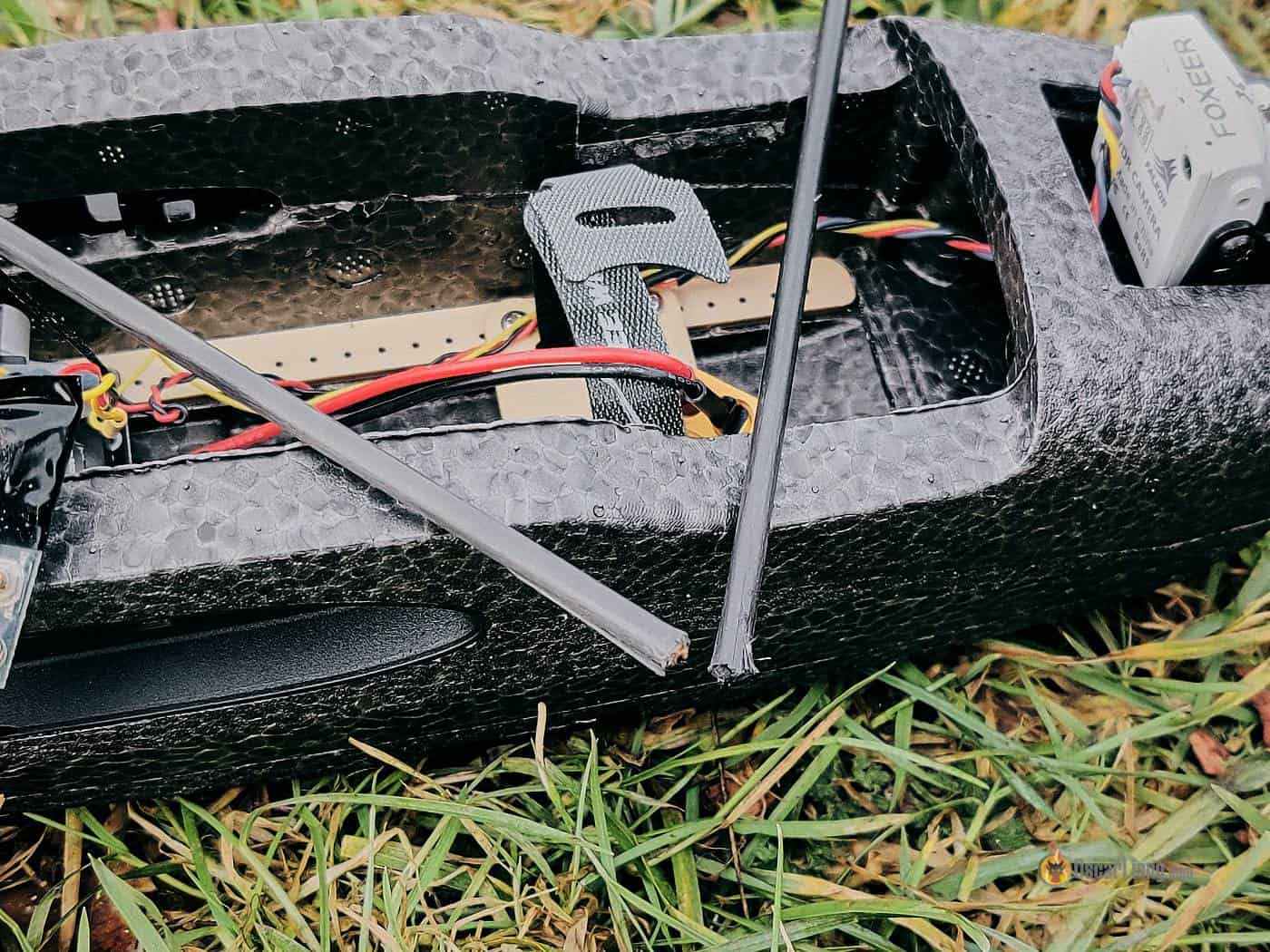
The foam is fine though, it was an easy fix. Luckily I have a spare Heewing Ranger kit so I simply replaced those broken parts and I was ready for round 2 the next day.
This time I lowered the rate drastically (to 40%) and it worked beautifully.
For me the wings always pop off in landing (some times the front hatch too), I guess it’s a good thing for durability so it doesn’t put too much stress on the foam and plastic, only time will tell. It’s easy to pop them back on anyway.

The landing gear (wheels) can actually help you take off even on pretty long grass as you can see in my video. However they aren’t made to last and only lasted a few flights, they can even fall out during take off. I completely broke one of them in a landing. Hand launching for the win :) But for the first few take-offs I would recommend using those wheels, so you can have your goggles on the whole time during take off :)

How to Setup
I will set it up like a fixed wing. All we need are 3 channels, so you can basically use any PWM receiver if you follow my method.
I am using the Radiomaster ExpressLRS ER5A PWM receiver. It has 5 channels, it has enough channels for even setting up differential thrust (so you can control each motor individually using the rudder control stick), but I won’t be doing it here for simplicity.
The two motors will share the same channel (Channel 1 – throttle) using a split servo cable. The wing servos will also share the same channel using a split servo cable (Channel 2 – aileron), and the tail servo will use a separate channel (Channel 3 – elevator).
The wing servos already come with a split servo cable, so you only need one extra split servo cable. You can actually get it from the LED and use it for the motors, because we won’t use LED in our build. Or you can buy some cheap split servo cable here: https://s.click.aliexpress.com/e/_DkzYE7r

With all the motors and servos plugged into the radio receiver, the 5V 3A BEC from the PDB goes to the BAT port on the receiver. Very simple :)

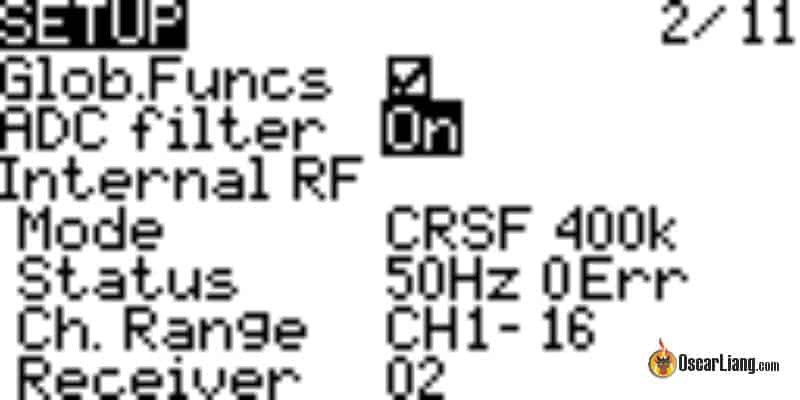
In your OpenTX or EdgeTX radio, setup a new model and enable ADC filter in Model Setup.
In Mixes, use CH1 for throttle, CH2 for Aileron, and CH3 for Elevator.
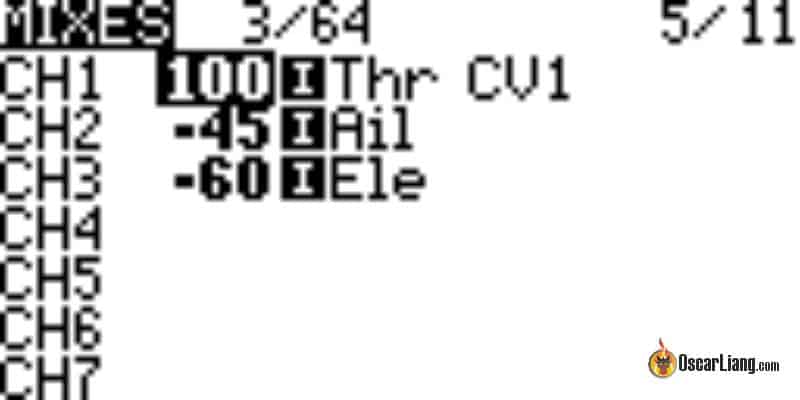
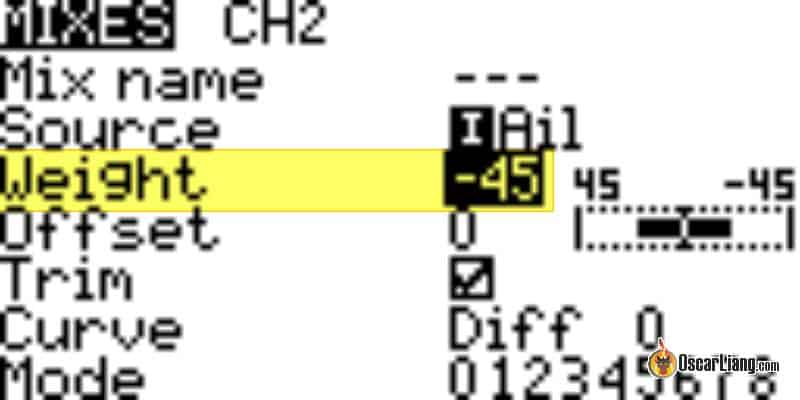
Make sure you reduce the weight (essentially reducing the rates) if you are using the same servo arm holes as me. I found 45% for aileron and 60% for elevator to be at the sweet spot for cruising, it’s even enough for some sporty flips and rolls.
Now test your controls.
When you move the pitch stick up (elevator), the tail control surface should go down. To reverse it, just change the weight of elevator in Mixes from positive to negative or from negative to positive.
When you move the roll stick to the left (aileron), the left wing control surface should go up, the right control surface should go down. To reverse it just change the weight of Aileron in Mixes from positive to negative or vice versa.

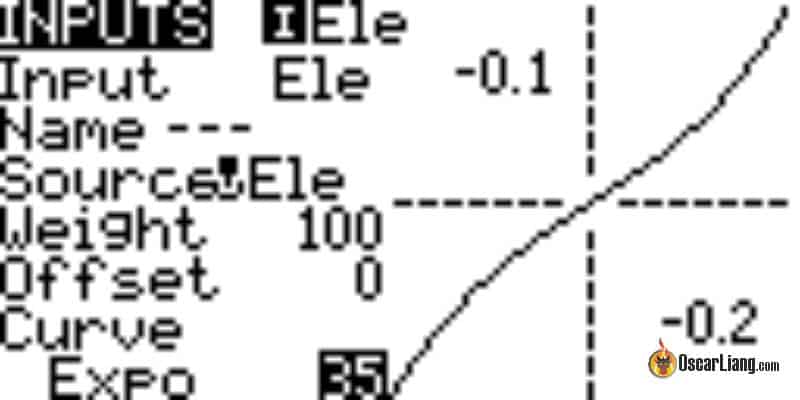
You also want to add some Expo to elevator and Aileron to have some finer control around center stick. To do this go to the Inputs page:
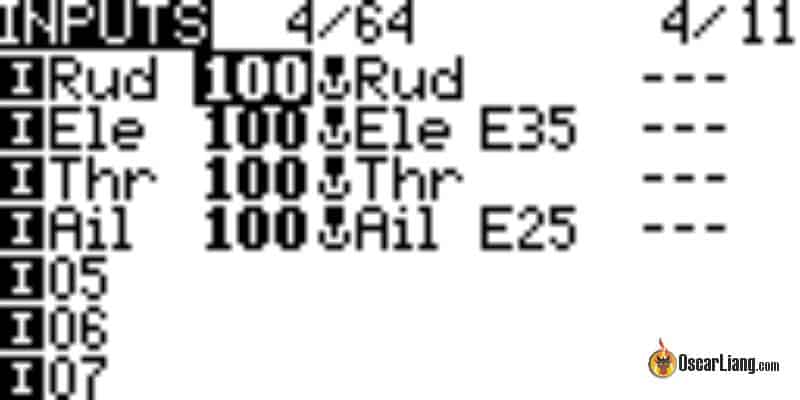
Edit elevator and in Expo enter a value such as 35. Repeat for Aileron and I would recommend 25.
I don’t have any big 3S LiPo, so I am using two 3S 800mAh packs connected in parallel (making it a 3S 1600mAh pack).
I also tried a 4S 1500mAh and it worked just fine as well, but you should scale down maximum throttle to 75% to compensate for the higher voltage otherwise you could burn your motors.

This is how I setup Channel 1 (Throttle), if you are using 4S, make sure to scale down throttle to 75%, you can do so with a curve.
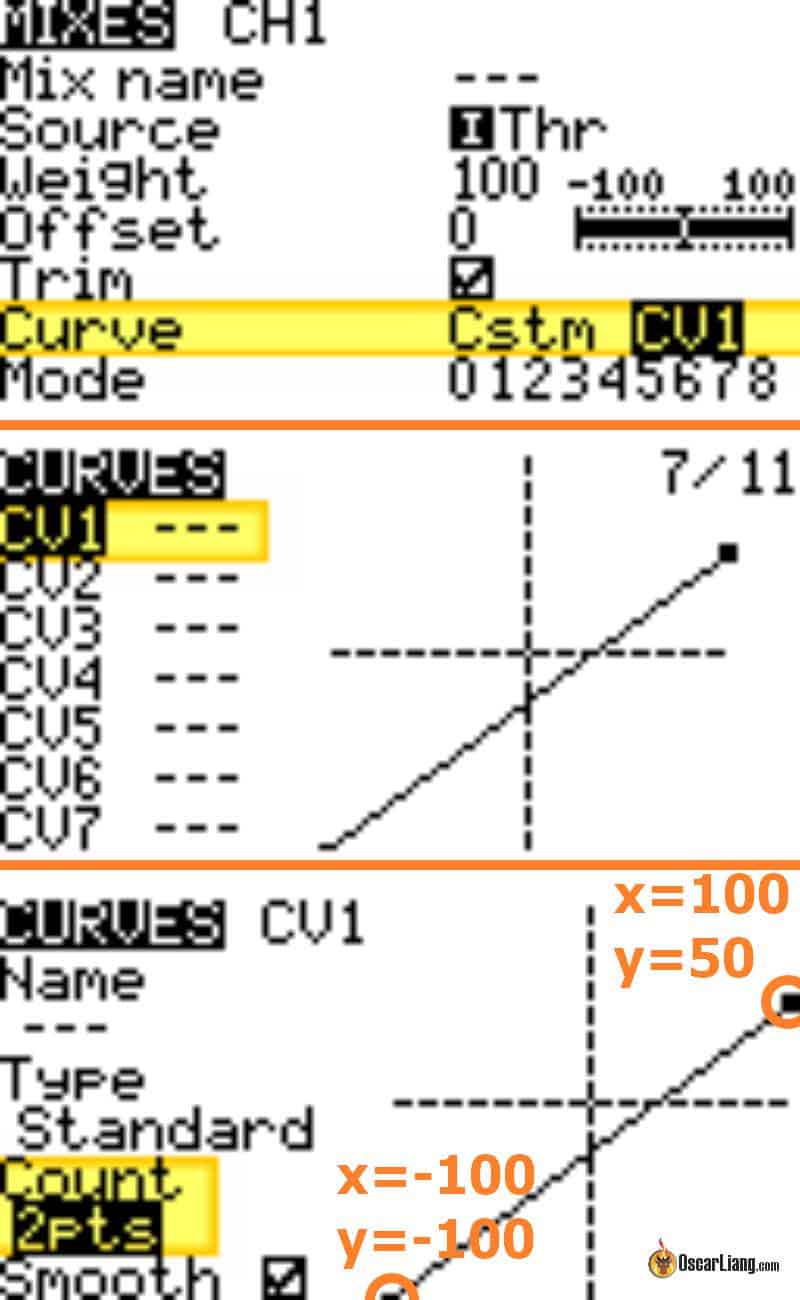
If you use 3S then you don’t need to do any of this, just leave Curve at default (Diff 0).
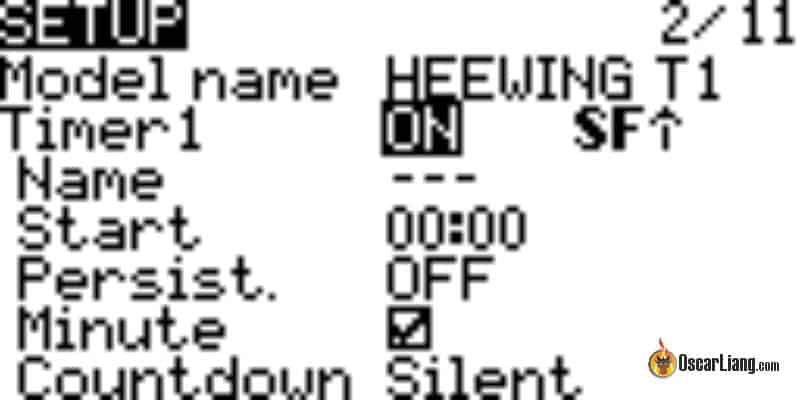
I also setup a timer in Model Setup, assign the arm switch to activate the timer, and it shouts how many minutes I have been flying which is handy to keep track of time. (I made a mistake here, it should be SD↓ switch, not SF↑)
Here are my Special Functions, it basically makes the SD switch my arm switch:
- Disarming the plane will reset Timer 1
- Arming the plane will make a sound
- When the SD switch is not down, throttle is overridden to 0%, this basically makes the SD switch my arm switch (highly recommended for safety)

Upgrades
Not necessary but nice to have upgrades/spare parts:
- Stronger Carbon fibre tail boom, RDQ: https://oscarliang.com/product-dndb
- More powerful 7g Metal Gear Servos, RDQ: https://oscarliang.com/product-f2rw
It’s always a good idea to make sure the plane flies well using just the receiver before putting any expensive parts in it :)
In the next few weeks I will be upgrading my Heewing T1 Ranger by installing a flight controller running iNav, bigger motors running bigger propellers for higher efficiency and flight time, DJI FPV system, and also some interesting / user friendly 3D printed parts. Stay tuned!
There’s also the VTOL conversion you can do, it gives your ranger the ability to lift off and land vertically just like a multirotor. AliExpress: https://s.click.aliexpress.com/e/_DCG09it
I don’t have plan to do this mod yet because it’s extra weight to the plane, also it’s expensive (costs as much as buying a T1 Ranger PNP kit), and you have to install Ardupilot on the FC, which I have no experience with. Maybe one day :)
Update (Mar 2023): As promised, I put a flight controller in this plane running INAV, I documented my process here.
8 comments
Great documentation! Thx!
Do you plane to build a Heewing T2 with or without flight a controller.? This documentation was extremely helpful for me. I’m very curious if the T2 will be exactly the same on the inside. From what I saw in a few YouTube videos. It don’t look the same at all. But it’s hard to tell seeing they were not discussing the insides.
I have no plan of building the T2.
Hey Oscar!
your homepage helped me out quite alot over the times xD
but there is a small error here: you are calling the elevator on the ranger elevon…anyways: thanks for the aileron and elevator throws down in the comments :)
haha yea you are right, I had only built fixed wings (tailless planes) before this, I was so used to calling them elevons. They are actually elevators on a normal plane. Thanks for pointing this out.
Thanks for all the details and great photos! After you set the rates to 40%, can you tell us what are the max throws (in mm at the trailing edge) of each control surface?
Aileron – from neutral to endpoints, about 9-10mm
Elevator – from neutral to endpoints, about 5-7mm
Thank you for the very clear instructions showing how to set the T1 up, particularly the electronics. I searched and searched the internet (including the Heewing site) and yours was the only site that was complete and free of wrong information.
Any chance of showing how to set up the differential thrust? I need this for a research project, and would be willing to pay you for your time. I am a newcomer to RC control, although I am familiar with airplanes. Please contact me if you would be interested at [email protected]. I would appreciate it if this communication was not made public.
Thank you!