
This tutorial explains the basics of quadcopter hardware, what each component does and how they connect with each other. There is a lot to cover, make sure to check out the links for more information on each quadcopter component.


After you have a basic understanding of quadcopter hardware, check out my step-by-step tutorial about how to build a quadcopter (drone) from scratch.
Quadcopter Hardware
The first step to building a quadcopter is to understand the components that it uses to fly.
A quadcopter consists of the following essential parts:
- Frame
- Motors
- ESC (electronic speed controller)
- Propeller
- Battery
- Flight Controller
- RC Receiver
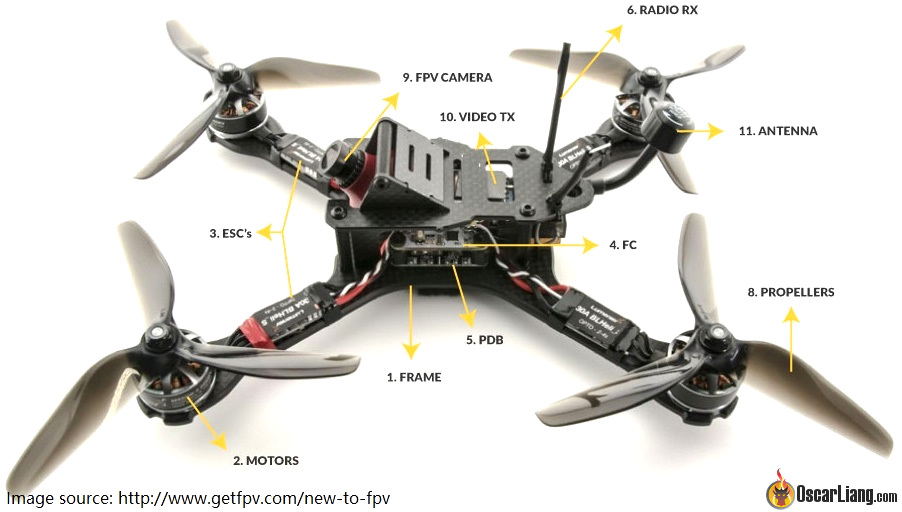
To Fly FPV (first person view), you will also need the following parts:
- FPV Camera
- Video Transmitter / VTX
- 5.8gHz antenna
There are other non-essential but useful hardware for example buzzer, LED’s, HD Camera, GPS etc.
Choosing Quadcopter Components
Table of Contents
Frame
The frame of a quadcopter is the main structure, or the skeleton upon which the rest of components will be attached. Once you have decided on what you want your craft to do (Aerial Photography, Racing, Micro Freestyle etc.), you need to decide what size best suits your requirements. The size of the frame will determine what size props you will use (or vice versa), in turn the size of the props will determine the size of the motors, which will specify the current rating of your ESC’s.
Builders tip: When choosing a frame it is important to check that the mounting for the FC (Flight Controller) and the motors match your choice for these components. Full featured flight controllers are most common with 30.5 x 30.5mm mounting pattern. Motors for 5” props often have a 19 x 12mm mounting pattern.
Note : 1st time builders should choose a well documented frame that is easy to work with. This is a great looking frame that is robust and spacious with great access to the components, but a little limiting on the choice of parts. Check out the review of the Diatone 2018 GT M200. This frame also offers great protection to the components which is important because you will crash it!!
Tutorial: How to choose mini quad frames
PDB
PDB stands for Power Distribution Board and it is often where the battery power lead (ie. XT60) is connected. As its name suggests, the PDB distributes power to the components at the voltages they require. These days the necessity of using a PDB is being negated by FC’s, ESC’s and other (dubbed AIO or All-In-One) components providing the same function. These components have a wide input voltage range and can be connected to battery voltage (aka VBAT), they can then output a stable voltage ie. 5v to power an FPV camera or other components.
Builders tip: Make sure that your PDB is actually necessary, nowadays it is likely that you will be able to distribute power to your components by other means. Ie. some VTX have a wide input range and can output a regulated 5v to power your FPV camera.
Note : AIO is a common term used for components that can fulfill more than 1 function, ie. an AIO FPV camera will be a camera and VTX (video transmitter) integrated into one unit.
Flight Controller
The Flight Controller (aka “FC”) is the brain of a quadcopter, it has sensors on the board so it can understand how the craft is moving. Using the data provided by these sensors, the FC uses algorithms to calculate how fast each motor should be spinning for the craft to behave as the pilot is instructing via stick inputs on the TX (Radio Transmitter). Most of the wiring on your quad will be focussed around the FC. It needs to have the RX (receiver) connected, so it can be told what the pilot wants the craft to do. Each of the ESC signal and ground wires need to be connected for the FC commands to be carried out by the motors. With the introduction of BetaFlight OSD (On Screen Display), even the video feed from the FPV camera goes via the FC to the VTX (Video Transmitter).
Builders tip: More functions often means more wires. For beginners an “all singing, all dancing” FC might sound fantastic, but the wiring might become very tightly spaced making it difficult to solder. Remember to test fit your components to your frame before you start trimming wires. measure twice, cut once!
Note : Some AIO FC’s will have a selection of various different components integrated onto the board from receivers to VTX, now even ESC’s are being integrated with FC’s though this is quite controversial.
Tutorial: How to choose flight controller
RX (Radio Receiver)
Transmitters (TX) and receivers (RX) are not universal and you need to buy an RX that is compatible with your TX, an FrSky Taranis transmitter cannot work with a FlySky receiver. These days it is most likely that you will be using either PPM or a digital Serial protocol, which will only require 1 signal wire for all of the channels, plus power (3.3v or 5v) and GND.The signal wire will be connected to one of the UART terminals on your FC (Flight Controller). Some FC’s actually have integrated receivers, if you are taking this route make sure that it is using a compatible protocol.
Builders tip : Make a note of which UART you have connected your RX to, so you can easily configure the FC to communicate with the RX in BetaFlight Configurator.
Note : Spektrum based receivers usually require 3.3v while FrSky and FlySky RX require 5v. Never supply 5v to an RX that only requires 3.3v!
Tutorial: How to choose TX and RX
ESC – Electronic Speed Controller
An ESC is a device that interprets signals from the flight controller, and translates those signals into phased electrical pulses to determine the speed of a brushless motor. Make sure that both your FC and ESC’s are capable of running the same ESC protocol ie. DShot 600. When selecting an ESC, remember that the current rating must be higher than the amperage drawn by your combination of motors and props.
These days an ESC has 4 input terminals, 2 are for signals coming from the FC. Signal and signal ground are wired to the FC, the 2 heavier wires are for Positive and Negative, they carry the high current to the ESC to supply the motor. These Positive and negative are wired to the PDB. An ESC has 3 output terminals, one for each of the wires of a brushless motor. Some ESC’s now offer telemetry, for more info see – How to set up ESC telemetry
Builders tip : If you are using an FC with an integrated PDB then all 4 wires going to the ESC input will come from the FC. 4-in-1 ESC’s are becoming popular as they can shave a few grams off your AUW (All Up Weight or takeoff weight *inc. Battery and other peripherals). A 4-in-1 ESC can connect to the FC in different ways, and they are not universal – Unless you know exactly what you are getting, I advise you purchase a 4-in-1 ESC as a stack combined with the FC such as the Holybro Kakute FC and tekkoS 4-in-1 ESC.
Note : The specs provided on the data sheets of motors are under static thrust test conditions. Props spin easier in free air and therefore motors use between 20% and 30% less current in flight conditions than that shown in static tests. If the maximum amperage draw of a motor is the same or just under the maximum current rating of your ESC it should be fine.
Motors
The motors are the main drain of battery power on your quad, therefore getting an efficient combination of propeller and motor is very important. Motor speed is rated in kV, generally a lower kV motor will produce more torque and a higher kV will spin faster, this however is without the prop attached.
There are many aspects to motor performance aside from raw thrust, high among these is how much current the motor draws from the battery. Remember to check the specs of your motors for their maximum amp draw, and ensure that your ESC’s are rated to withstand this amperage.
Builders tip: The brushless motors that are most commonly used on a miniquad have 3 wires, it doesn’t really matter which of the 3 output terminals these are connected to on the ESC, swapping any of the 3 will change the direction of rotation. Motor rotation can be set in BL_Heli configurator.
Note : Remember to ensure that the motor mounting screws are not too long and that they do not touch the stator windings of the motor. This contact can cause a short in the windings, spelling the end for your motor, also make sure that any grub screws are fitted and tightened.
Propellers
There are possibly thousands of different types of propeller for quadcopters, with multiple options in almost every size. A heavier propeller will require more torque from the motor than a lighter prop, also blades with a higher AOA (Angle Of Attack – aka “aggressive props”) encounter more resistance from the air and require more torque. When a motor has to work hard to turn, it draws more Amps. Finding a balance between the thrust produced and the amperage used by the prop and motor combination is a balancing act that every quad pilot goes through, there is no “right answer”.
Builders tip : Remember that your props have to be really tight, it helps to have a tool to grip the motors while tightening the prop nuts. If the props slip this will cause erratic behaviour in flight.
Note : Props these days are generally well made, but they may still be unbalanced. If you are getting vibration or ‘jello’ in your camera, check your props are undamaged, unbent and balanced, before your start disassembling!
Tutorial: How to choose propeller
Battery
LiPo batteries are the power sources of the quadcopters. LiPo is used because of the high energy density and high discharge rate. LiPo batteries are rated by their nominal voltage (3.7v per cell), cell count in series, (shown as a number followed by ‘S’) ie 4S = 14.8v, capacity in mAh (ie.1300mAh) and discharge rate or ‘C’ rating (ie. 75C). If you want to know more here is an article on LiPo battery C ratings.
Builders tip: The battery is the single heaviest component of your quad, just because you put a bigger battery on it, it doesn’t mean it will fly longer.
Note : buying cheap “no name” batteries is not recommended you will find inconsistencies in cell voltage, inflated claims of capacity, and they will suffer from “voltage sag”.
Tutorial: How to choose LiPo Battery
FPV Camera
An FPV camera allows the pilot to see the view from onboard the craft. On an FPV mini quad, there are normally 2 cameras, one for real time video streaming, and the other for recording HD footage.
FPV cameras don’t have great video quality – they are designed for WDR (Wide Dynamic Range) and low latency, which is extremely important to FPV. WDR refers to a camera’s ability to display changes in lighting conditions, and areas of shadow and light in the same image. Latency is the amount of time between your FPV camera capturing the image, and display that image on your screen or in your goggles.
The FPV camera will connect to the VTX (Video Transmitter), often via the FC which then overlay’s OSD (On-Screen Display) information on the image. A camera usually requires 5v to operate but some are capable of wide input voltage and can be connected to VBAT.
Builders tip: If you are getting interference in your FPV image when applying power to your motors you should fit a capacitor to filter the noise. Here is an article to tell you more about capacitors for noise filtering.
Note: Cameras transmit images in different size ratios (ie. 16:9 & 4:3), check and make sure that your FPV display (goggles or screen) is compatible. Different signal formats are used in image transmission too, (ie PAL & NTSC) your FPV display must also be capable of decoding the relevant signal type. These days cameras are often able to switch between these signal formats, and some are now even able to switch between image display ratios as well.
Tutorial: How to choose FPV Camera
Video Transmitter
Video transmitter, or VTX, connects to the FPV camera to transmit video to the FPV goggles or monitor. Most quadcopters these days use the 5.8GHz for video transmission. You may find that your VTX can offer other functions such as a regulated 5v output that can be used to power your FPV camera. Remember that if you power your VTX without an antenna connected, it may burn out!
The VTX will receive a signal from the FPV camera (often via the FC) which it then broadcasts on one of a number of channels incorperated by the 5.8gHz frequency bracket. Some VTX run on 5v some require more. Be aware that if your VTX does run on 5v that it will be active when you connect your FC to USB, so you should have an antenna connected when configuring BetaFlight. Remember that if your VTX requires more than 5v it will not function with USB power and you will need to connect a battery to set up your channel, band and output power.
Builders tip: Your VTX gets hot, it is a good idea to place it somewhere on the frame where it has some space for airflow to cool it down.
Note: If you are flying with others be aware of your VTX power, make sure that you are aware of the frequencies being used by others, so you can maintain good signal spacing.
FPV Antenna
Every VTX requires an Antenna to transmit signal. This guide explains the basics of FPV antennas. Antennas come in various shapes and sizes, directional, linear and polarized.
Builders tip : Carbon Fiber will block the 5.8gHz signal that is used by the VTX, make sure that the antenna is far enough away from the frame to be able to transmit without the signal being blocked.
Note : If you are using polarized antennas, make sure that both the antenna on your VTX and the one on your goggles are using the same direction of polarization. LHCP works only with LHCP, and RHCP only works with RHCP.
Optional Components
The most common additional components added to a mini quad are LED’s and a lost model buzzer. These are really important for a beginner, especially if you don’t have a nice flat area of mown grass, your quad can go really quickly which means it can be far away quite fast.
Especially if you are a beginner and are disoriented flying FPV, without something to draw your attention, your quad could be gone forever! Of course the Go-Pro or similar action camera is is a common feature. so we can show off all our successes and failures to our like minded youtube subscribers!
Builders tip: Smaller quads are better at hiding in long grass! :p
Conclusion
Hopefully this article has given you a better understanding how a quadcopter works, how the various components communicate and physically connect. To learn more about flying a Quadcopter, see this beginner guide about control.
Please do not hesitate to comment or provide feedback on this article.
Edit History
- Jun 2013 – Article created
- Apr 2018 – Updated info, URL changed
156 comments
do I need to have an air unit attached to the camera or can I solder it directly to the PDB?
Also, could you give me a list of the best components for a drone that has a camera for taking pictures and recording?
What remote controller would you recommend which has a screen which would let the camera be projected off it as well?
Hi, Is there any source to get FC/ESC or other circuit Schematic if anyone want to make a DIY ?
how to connect 8 escs to a radio receiver with six channels
Dear Sir,
Thank you very much for your kind explanation and appreciate so much ….
I am a professional modeler in designing ,building and flying the pattern model aircraft , and now a days i am fond of quad rotors for taking photos and film…so i am in lack of information and kindly request you how to design and then after building the quad rotors how can i set and adjust the heart of quad which is flight control ….
I will be grateful if you do me a favor and guid me in this respect….
Faithfully yours,
S.M.Ghasemi
Hi sir,
I am a school student of age 18 .I have decided to do this multi copter as my first project. will i be successful? And is there any other tutorials like this in your site. Please let me know as soon as possible.
Thanks a lot sir. This site was very much interesting……
Can you plz post code for auto levelling of quadcopter
i need to know a thing:
in batteries,there is a thing . max continuous discharge:30c(66.0a) and max burst discharge:60c(132.0a)
what’s that mean about
“continuous” means you can discharge the battery all the time until it’s empty. “burst” means you can only discharge at that rate for a few seconds.. (normally 10 seconds)
there are conditions for motor as *r and without *r for the top nut (bullet shaped)that should not be unscrewed while testing.what that mean
hello
thanks a lot for good subject in your site.
I have a question.
If I want increase flight time of my quadcopter can I increas NUMBER of battery in quadcopter?
goodbye
yes, by doing that you basically increase the max battery capacity. but you need to take into account the increase of weight, if it’s going to be worthy
My team is working up to a design for a full scale Delorean QuadCopter build. All plastic vacuform and aluminum/carbon fiber frame. We are trying to find references for larger scale drones. Do you have any colleagues that might have a starting place for us? Thanks!
I was a good tutorial , but , what is the circuit arrangement or how do you arrange the components on the frame ?
hi oscar
i have prepared a drone but i have a small problem i’m not able to get any signal to control board from reciever while reciever test. but i’m getting signal from transmitter to reciever but not able to get signal from reciever to control board.can you help us in any way
“hi oscar” fantastic site , i am doing a graded unit on drone design and it has been extremely helpful
Hi Oscar, …..That’s a great tutorial. Thank you so much.
Hello, I had a few questions about building a quadcopter but is it possible to reach you privately or via email to ask these questions? Thank you
Hi Oscar.. My quad copter has takeover problem how can i fix it. the main problem is that one brushless motor is starting rotation before other three? i’m beginner please help
Please could post your questions with some more detail (maybe with a short demo video) on the forum in the future: http://intoFPV.com … I don’t want to miss your comment, because I only check my blog comments once a week, but I use the forum daily!
Hey Oscar,
I really like your suggestions for building a drone from scratch. I was wanting to build one from scratch myself that could deliver Christmas presents to my friends that live in neighboring cities to mine and I want it to carry boxes up to 15 lbs and have an ability to fly up to 3 hours. If maybe you heard about the Amazon done, I’m really hoping for something similar to that. Additionally, I want it to have solar panels to recharge the battery up in the air. So what would be your suggestion on the various parts I may need for a very economical build? Any kind of help is appreciated, thank you very much in advance.
Darin
hi Oscar
thank u Oscar,but I need guidance for programming by own ,I knw embedded protocols ,c ,micro controller but im confused too so plz help me out
Hi Oscar,
Can we use DC motor instead of brushless motors?
dc motor cnt controlled flow of current in a rotors plz use brushless motors
Hi Oscar..
We are planning and design and fabricate a Quadcopter with a clamp and cutter attachment for harvesting coconuts. Any suggestion pls..
Thanks in advance..
Hi Oscar,
Hey can you send me the link of the post for coding for this quadcopter?
Hi Oscar~
I am a middle school Tech Ed teacher and a newbie to quadcopters and drones. I do have 3 3d printers and a laser engraver. My goal is to design a lesson for students to design and 3d print simple and basic mini quad copters. I would love to come up with a “kit” for hardware component parts that my students can design their shells around. As a newbie, I don’t know what parts I need (motors, controllers, ESC, battery,etc). I would like to use Arduino type controller as I think student would love flying a mini drone with their cell phone.
Can you suggest any parts needed to get started with a simple mini or nano type quad copter? Any help would be greatly appreciated.
Bob
maybe consider a micro quad i built recently. They are very easy to build, only takes an hour… a lot less dangerous than ordinary brushless multirotors, as they are not as powerful and much smaller. Check out the guide here
Hi oscar..
now I m selecting quadcopter topic for our final year project..please give information about transmission?,can I use zigbee
or any else
“Hi Oscar” – I’m new to RC quads and I’m jumping right in and building a Hunter 400 V-Tail. Yep – I know that’s nuts, but it’s the craft I want. My question is: Do all quads need to have a PDB?
Thnx – MC
Hi MC
no you can just use a wire harness to connect your components if you want, whichever way you find easier.
see this post about the difference
Hi Oscar
Do you have any additional info for drones controlled via Wi-Fi?
Thanks for the information, it is excellent for beginners.
Hi Oscar, I love your tutorial, i want to build a quadcopter, and i’m using this as my guide. where is the post about the software, on how to go about the algorithm and programming, a link will be nice.
Thanks
Hi Oscar, I have been researching the subject for the last few days and I have to say this is one of the best pieces I have read so far in terms of technical descriptions of how and why of things. really appreciate your hard work.
Hi Oscar,
Can I use arduino and xbee as tx and rx?
And oh! Do I need anything else as other than the IMU and arduino for flight controller?
yes Xbee can be used two way communication.
yes IMU and arduino is enough.
Oscar, I’m thinking about making a quadcopter with a smartphone on board. Smartphones have sensors like GPS, acceleromete, gyroscope, Magnetometer. I think I can use LTE network to control the drone. Bluetooth can be used for controlling ESC. I would like to hear your opinion, Oscar. Please mail me, and Thanks in advance!
sorry i can’t comment much on your idea, this is beyond me :)
I think this can help you if your planing to use Arduino.
For Windows Phone: blog.arduino.cc/2015/04/30/microsoft-and-arduino-new-partnership/
For Android: blog.arduino.cc/2013/07/18/how-to-control-arduino-board-using-an-android-phone/
dear Oscar,
what a vivid tutorials. Im an art teacher and love r/c since a kid. For non.technical person like me, your blog is a treasures. May Godbless you! thnkyou.
Cheers :)
Dear Sir
I want to build a capacity multicopter or Quadcopter. How can I get help for detail design and complete build.
Regards
Aktar
I am interested in building a quad copter that I can personally get into it and fly. I am thinking of using hydraulic motors with a central gas engine driving a hydraulic pump. With this set-up the motors should all run the same RPM. I know nothing about what props I need or motor speed, (basically nothing). Am I sounding dumb or is this a possibility? Thank you, Rick
I think it sounds too ambitious for someone just enter this hobby.
it would be more realistic if you have experience building and flying a simple electric one first. they are a lot simpler than gas engine.
This is very good and thanks for sharing valuable information.
1) I would like to know mathematical calculation for choosing each and every components.
2) please share programming algorithms
3) please share how to interface the sensors with microprocessor with algorithms.
4) instead of going for micro controller i want to use processor so guide me which one is good.
5) Even without using transmitter i want fly the copter so can you help me .
Please google “Multiwii”, it’s an opensource quadcopter project. you will find your answers there.
Hey, where is your second article? I can’t find it and am really interested in the programming of quads. Thanks!
sir am going to build a quad-copter an am persuing b.tech from mechanical branch so,i want to know what type of calculations are i have to take in use and for what purposes plz explain it sir, and specially for finding thrust…..
Hi Oscar,
I am currently coming from a Parrot Bebop drone and want something more exciting. I am planning on getting into this hobby full force. I have been researching for weeks for some things are still unclear. I’ve read all of your posts and just have a couple of questions. Can you please guide me in the right direction on my first build? I’m looking to build the best.
What I DO Know:
1) I want to start with a sporty hexacopter. I found some 290mm carbon fiber on ebay that look very cool. Is that big enough without being too big?
2) I want sporty but I am spoiled by the Bebop video quality so I will need to be able to mount a gopro gimbal like the DJI phantom plus. I will remove this when FPV racing but need to have it for Real Estate photography.
3) I need something with over 10 minutes fly time
4) I want to use goggles, would love head tracking if possible.
5) I want a flight controller for follow-me features, RTH, waypoints, etc
So I have been able to find most of these parts online. Most are vague as to how well they will all work together. I’m comfortable with a soldering iron and decent at webcode, but how technical will I have to be to put this all together? I can’t imagine what is involved in programming a flight controller and what additional tools am I going to have to buy to get into this?
So lots of research but lots more questions still. Hoping you can help.
Answered you questions here: https://oscarliang.com/building-first-quadcopter-flying-drone/
plz send arduino quadcopter program code demo
Hi sir,
. I’m very much intrested with your blog and wanted to build a quadcopter just for myself I’m a student of class 11 .the only thing that I wanted to know about the quadcopter is that what are the electronic equipments required to make a simple quadcopter at a cheap rate at home.sir if you don’t mind would you please share the list of things to make the quadcopter.
. Thank you.
Great guide. I have one question though. If I wanted to connect an IMU with an on board processor to an Arduino 2560, do I need a 3.3v to 5v adaptor?
depends on your IMU, some only work with 3.3V which case you will need to convert voltage. some can take 5V which case you don’t.
SIR HOW TO MAKE Propellors AT HOME USING PLASTIC ??
just buy them, they are cheap.
Plizzz give me a programming of quard copter
what components do i need to build a helicopter
you mean a quadcopter? the most basic components you will need are:
Flight controller, ESCs, Motors, Radio transmitter/receiver, Propellers and a frame.
if you are still not sure, read the article again.
sir, i want to know how much cost will it take?
depends on the parts you use, it could vary between $150 to $1000+
Thanks for informative artical.
Sir I am badly stuck in stabling my quardcopter. Kindly tell me how can a effectively tune my PID controller for a stable flight. I am building it for academic purposes. Kindly guide if i am wrong. I applied one PID on 3 angles, and other PID on the 3 rates. There are six parameters per axis. How to tune them ?
Thanks
awesome blog post on electronics concept.really helpful post for all the electronics students i was really waiting for this kind of post. thanx for sharing the post.
Hi, I found your article really useful!
I’m planning to build my own quadcopter and here are the specifications:
1. Total weight= 800-900g
2. Motors: Avionic m1826/31 Kv1900 MICRO brushless motor
Kv=1800, Power= 55W, Idle current=0.2A,
(4 of these)
3. Propellors: 10×4.5 propellors (4 of these)
4. ESC: Avionic White SIMON-K 20Amp (4 of these)
5. Battery: Wolfpack White 100mah 25C 7.4V
6. Transmitter: Avionic Wifi receiver (for iOS and android)
Are all of these fine?
Also, I need to know how to program the ESC and gyros and other IMUs/Microcontrollers! I have no idea how to connect them or make them work!
Get a flight controller such as cc3d or naze32, plug it in to a computer, get the appropriate program (librepilot for cc3d and cleanflight for naze) and use them to program the FC, and escs through the FC
greatest article about quadcopters……… great
thanq for giving info
now i got some of my doubts cleard
Great work. Very helpful. Thank you.
where is the next tutorial ? In which programming algorithms are expalined……
Hi Oscar – excellent article – keep them coming dude.
I’ve seen some comments from users wanting to use a PIC to build the controller – has anyone made any progress with that? I would like to do the same – appreciate all help I can get.
rgds,
chan
Oscar can u explain me working of auto level /self level in kk2 board self level is either stick or aux at starting it alwalys shows self level is off
with stick SL activation, you move your roll stick to the right, and then arm. does that work?
if not, is your acc sensor calibrated?
if it’s still doesn’t work, factory reset it, calibrate it, and try again.
i am building my own quadcopter but i didn,t get appropiate propelers for my quadcopter . so will any one tell me from where i get these propelers easily.
Hi Oscar You Can easily get it from Ebay. It is very cheap and available in different sizes.
I really like what you guys are up too. This type
of clever work and exposure! Keep up the terrific works guys I’ve added you guys to our
blogroll.
Oscar, Thanks for your article, it’s excelent!!
It would be great when you already have the chapter “Make You Own Quadcopter Controller Board”.
Thanks for all!
very useful……………
one doubt
distance between motor..?
Hey Oscar,
Its good information for beginners who are starting with Quadcopter Projects.
It will be helpful if u guide me in building a quad.
I am learning abt these engineering concepts as i m not from dis background.
I m from software background.
So what i want to learn is To build a quad and control it thru mobile or computer.
i have an Arduino Uno board so if u can help with further information.
It will be really appreciating.
Vishal Dave :)
Hurrah! At last I got a web site from where I can
genuinely take valuable data regarding my study and knowledge.
Great stuff ! I am 67 years old so please don’t wait too long for the next installment ! Will you get into FPV as well? I have been building stuff– electrical mechanical since kindergarten, hold a couple of patents and an extinct
pilots license and want to see this to the end. Thanks Ray
Great to hear that! I actually written something about FPV already, check out the article list: https://oscarliang.com/multicopter-tutorial-list/
Hope it helps you! :-D
I like the helpful info you provide in your articles.
I’ll bookmark your blog and check again here regularly.
I am quite sure I’ll learn a lot of new stuff right here!
Best of luck for the next!
Excellent ! I found almost all the things that I had been looking for in your article. Looking forward to some more articles of yours.. Do you have any suggestions or related articles for way point navigation with quadcopters?
google :-p
Hiya very cool blog!! Man .. Beautiful .. Wonderful ..
I will bookmark your web site and take the feeds also?
I am glad to seek out so many helpful info right here in the publish,
we want work out more techniques on this regard, thank you for sharing.
Hello,
i was going through your tutorial , and i was wondering if instead of buying a flight controller i could use a μP like arduino and connect the 9DOF stick to it. Wouldn’t that just make the arduino itself a flight controller or am i mistaken ? I also want to add a gps module to it.
If what im suggesting is possible, should i maye consider buying 2 arduino UNO or 1 mega 2560, will it handle all the information just one ?
Lastly, i will have to figure out the algorithm at my own if i dont buy a flight controller right ?
Thanks in advance
Hi, yes, you can use the Arduino + some gyro/acc/mag sensors to make a flight controller.
You just need one Arduino, for basic usage UNO or Nano should be enought. but if you want to use GPS as well, you will need Mega.
you don’t need to write your own code, Google Multiwii, it’s a flight controller software for Arduino.
First off I loved this it was extremely helpful.
Second, can I use Walkera Devo-7 Transmitter with the KK2.1 Multi-rotor LCD Flight Control Board from Hobbyking? And if not is there one relatively cheap that I can use with the KK2.1
Maybe, if you can find a RC receiver that can bind with your Walkera Transmitter.
I don’t have a Walkera, and haven’t seen people done that before, so I can’t answer your questions.
If you are looking for a brand new RC transmitter to use with the KK2.1 board, I would strongly recommend the Turnigy 9X transmitter!
With a few modifications, you can turn this $50 transmitter into an excellent one that worth hundreds of dollars.
Awesome, that’s cheaper than the Walkera (I’m on a low budget)
You mentioned modifications, are they hard/ complicated to do? And how is it done?
check this out.
Hello there! This article could not be written much better!
Hi Oscar ,
You have mentioned in the middle
‘”Alternatively you can also use general purpose microcontroller, such as Arduino.
[Coming soon]”
Have you completed this and if so can you give me the link.
Hi Sujith
Sorry I was thinking to build a complete quadcopter flight controller system using Arduino from ground, but it’s going to be a really big project, and I still haven’t find the time to do it yet.
Actually there are existing Arduino flight controller software available, called Multiwii. Google it.
thanks
Oscar
I think your quadcopter is really amazing. You have simply described its working and construction. We have a product called surface protection tapes which protect your instrument from scratches or other damages. You should this once.
I’m thinking about building get one for my senior project but wondering how much would all of the parts put together cost?
depends on your budgest, the min cost would be around $100 (not including the optional accessories like battery chargers and RC transmitter/receiver and so on)
Hey there! I’ve been reading your website for a while now and
finally got the courage to go ahead and give you a shout
out from Lubbock Tx! Just wanted to say keep up the excellent work!
Hi,
Thanks for such a wonderful article about the basics of quadcopter. I was wondering if you can shed some light on how quickly the lift force generated by the motors changes when you change the velocity of the motor at 200 – 300Hz. Will you be able to change the lift generated also at the same frequency?
Very unlikely. You need to take in to account the momentum of the propellers. Larger and heavier propellers will have more momentum and will be slower responding to ESC signal changes. That’s why many people prefer using hexacopter even octocopter with smaller propellers in windy environment, so the thrust can be adjusted much faster and achieve better stability.
Anyway, this might be an important factor that affects the performance of an aircraft, you shouldn’t be stuck with this until it really becomes a problem.
Thank you sir for your valuable advice. Would you please specify the dimensions of the arms and that of the main frame ?
what? the frame shown in this post? it’s just a random google image. The size of the frame is totally up to you and how much weight your multicopter can carry.
hey Oscar,
add me up on facebook.. do u work within a team in this? or do you do this by yourself? thanks a lot for this info man.. can’t wait for d board and d other parts you’ve missed to put here.
CarLo Mark
Hi, these are just research I have done, and put together. The software part requires understanding of some university level maths, which is taking me time to understand.
However there are a lot of commercial flight controller available, such as my favourite starter board, the KK2.0.
thanks
Oscar
Hello, and I would like to thank you for your valuable information.
The reason I’m writing this is because I recently crashed my first quadcopter. Leave it to me to bite off more than I could chew. I built a Bumblebee that I bought from HK. If I only knew then. Now I have a $400 pile of parts. Luckily, the carbon fiber is what really got damaged, and I have enough parts to build a more solid quadcopter. Aluminum square tubing, 30 amp esc’s, and this time I’m going to use the Multiwii board that’s been sitting on the shelf. If I get in trouble, then next time I want to be able to hit a switch and watch it stabilize and do the RTH thing instead of walking out through the desert to gather up the broken parts.
Can you recommend a software? Multiwii, Arducopter, Hefney. Which would be best for just playing? No ariel photography. The only reason I would put a camera on it would be so I could have FPV with something like a Fat Shark. I figure I could fly it better if it looked, to me, as if I were flying.
Hope to pick your brain, Mark
Hey Mark.
I know how it feels when carrying a crashed quadcopter home. I actually thought about giving up the hobby that afternoon, but the temptation is too hard to resist. :-D
So software… If it’s just flying for fun, maybe a little FPV flying as well, I would personally just use the KK2.0, very stable, and easy to tune. Just make sure the board is well protected (get a case or something), you should be fine.
As for Return to Home, you have limited options here. I don’t know if you even can do RTH in Multiwii, Arducopter and Naza are both quite good at this. I don’t know Hefney so can’t say much on this.
I personally prefer Ardupilot interface. APM2.5 is $90 and the Cruis AIO pro is only $60 (can run multiwii as well).
Mark,
Please see my earlier October 29th comment above. An excellent starter for you would be a cheap toy quadcopter to learn the basics of flight. Don’t be put off by the word “toy”. Some of them are actually excellent flyers, and as mentioned perfect for learning flight skills. I personally recommend the $49 WLToys V212, as it is an excellent flyer for beginners and experts alike.
If you still have the bug :) learning to fly with either of the above should help prevent losing your next high-end quadcopter.
Greetings! Very useful advice in this particular article! It’s the little changes which will make the largest changes.
Thanks a lot for sharing!
Very nice article. I certainly love this website.
Continue the good work!
Awesomeeeeee!!!!!!
Nice article, very informative. One thing though – you really should have someone proofread your web pages.
I really should! Sometimes my writing could be quite bad when I try to rush it. Thanks for the Advice :-)
First of all man. I think it is a great post. However, I want to write the code on my own so that I can call the drone actually mine. Could you please help me with that?
Thanks in advance
very good
Where can i find the programming and software part of the tutorial? and also do you happen to have the circuit board setup? thank you!
I am still writing the software (algorithm) part.
but to make things easier and less challenging, you can use “multiwii”, it’s a arduino sketch. I built a multiwii flight controller using arduino nano before.
Nice review, but from the comments, I see many beginners getting ready to rush out and build their own. The end result is people who barely know how to fly are sending their sometimes quite heavy and expensive quads over populated areas. It is an accident waiting to happen, such as this guys first flight:
http://www.youtube.com/watch?v=_U8iHn_2l0U
The following is intended to help fill in the missing critical pieces of information for new flyers. It’s one of the first intended to actually teach the basics of quadcopter flight, and is intended for beginners to intermediate quadcopter flyers. Inexpensive, very light-weight and ready-to-fly quadcopters are the only used in the example flying tutorials (no heavy build it yourself equipment here). I feel that a cheap $40 toy quadcopter will more than pay for itself by preventing the loss of a follow-on hobby grade quad (such as the Manhattan incident). For those considering this hobby, I highly recommend that you start slow, and learn to fly (and fly well) as your very first objective. After that, then consider stepping up in this hobby. You’ll be less likely to lose your quad, endanger pedestrians, and anger the public.
http://quadcopter101.blogspot.com
http://www.youtube.com/watch?v=XGjLL9Fd5wA
superb…… very informative.. so basic… anyone can understand soo quickly
My quad copter weighs about 1kg and I don’t know where to find any brushless motors. Please help!
Try to look for RPM Range between 800 to 1200kv. and then try to find the thrust of that motor.
another trick i use is to find the pre-built kit (e.g. on ebay) that has similar weight to your design, and see what motors they use, and find something similar for yourself.
hi sir,
i m polytechnic electronics 3de year student.
i want 2 make a Quadruplicate its self .so how i purchase items and where
and what is the total pries of all parts.
please tell me on [email protected],+919808923821
really depends on what is the size and purpose of your quadcopter, FPV? aerophotography? or just fly around for fun?
Start from sketch, you would expect to spend at least $200 for all the basic parts (like quadcopter parts, RC transmitter, Lipo charger etc)
super descrptn…:O
wat abt d cost details..?
Thanks, I try to only explain how a quadcopter works, and stay away from talking about the cost. Because they would involve advertising specific products and shops
I think it’s best if you google what you need, you should be able to find a lot of answers. or ask question in the forum someone should be able to help you.
thanks.Your article is very useful for everyone. I was a student in Vietnam. I’m working on quadcopter and troubled about the program, I use pic 18f4431. hope your new article in next time
thank you! :-)
I am an undergraduate student and this was very much helpful to start, one of my undergraduate project.I am Not going to tell all the stuff which i gain from this article and so much thanks for the article….(Y)
ECE BRANCH…electronics student,India CUTM collage…
Really I like this…
I need some suggestion from this
actually I have little interest to design ESC and all expect receiver transmiter and motors…
for this case I need suggestion regarding this
please help me..m’ am engineering student 5semister….
please mail me with your views..
thankyou
[email protected]
does a longer Motor to Motor distance mean greater stability and control or would it mean less?
I think it would be more stable to have longer motor to motor distance. when motors gets too close, the air flow from one motor might affect others.
Also it needs more work for one motor to move a certain angle when the frame arm is longer. So there is also a trade off between agility and stability there.
Firstly, thank you so much for all of the great overview and insight provided here! This sight was a gold mine, its really helped kick start my better understanding of the fundamentals of quad-copter basic functions and critical aspects. im a new enthusiast and hope to get building one soon. Im also going to try and add some extra optional functionality/purpose (stream-able video with possibly some form of objects/person tracking maybe?) to the copter via a raspberry pi, but that’s another avenue of thought.One thing at a time, my first priority is to get a working copter…
As someone with a small but quite limited understanding of electronics i do think it may be useful (if not only for myself but possibly others) to supply a general basic “wired diagram” to better illustrate how these separate components should all be connected together?
Some extra explanation of the flight controllers could be useful also (i know there’s some great info at the link you provided in this section), but as someone new to the RC world, some of this stuff im finding a bit overwhelming and difficult when browsing for parts, as there are not may other websites that are as informative as this one, especially shopping websites, who list the available features of the chip/board, but i guess this is just from my lack of electronics experience and limited understanding of the particular componets at this stage…
The main question arising from this would be is a board that has built in sensors/IMU better than one you have to add ones onto? i know that the all in 1 boards probably come in at a higher price but, if buying all components separately, should all come to round about the same cost anyway right? would you have better control over the quality/amount of components with purchasing them separately, i guess overall the more sensors the better, right?
anyways, sorry for the essay and keep up the great posts!
I am very happy that it helped you! :-)
I think if you are not familiar with electronics, To start with, it would be a good idea to get a quadcopter kit, with a dedicated flight controller, like the KK2.0 (around $30) that includes the IMU too. there are tons of tutorials and demo on youtube. Because all the parts have been tested by some other people, you don’t have to worry about the hardware, and you can concentrate on the configuration and flying experience. Once you get a better understanding how it works, you can begin customize your quad a bit more, and buy different parts to improve it, or even build a new one with all the parts you want!
I am currently building a new quadcopter, i like a bit of challenge this time, so I will be using the Arduino and get the IMU sensors separately. I have been posting articles with my progress on this blog.
I am currently at the stage of waiting for parts delivered. as soon as i get them and test every working, i will write something more comprehensive.
don’t hesitate to ask my any questions on the forum! :-D
really looking forward to hearing from you about your progress
Once you figure out building the flight controller from the arduino and the IMU please post. I am currently building a quadcopter for one of my engineering courses and we are attempting to create the flight controller as well. Goodluck
Hi! First of all, great post, thanks! I’m building a quad for a school project and I’m designing my own flight controller (I will use a PIC IC instead of an arduino) so this post is more or less a bible for what I’ll be doing. If you want, I could send you my schematics, BOM and code once I’m done, that way you could complete the FC section.
Sounds Great Jonathan! I am really interested! :-)
Please keep me updated with your progress!
hey mate have you got around to writimg about the software part
Thanks for a clear, well-illustrated, brief explanation of the critical aspects. Please consider discussing photography and First Person Viewing. Quadcopters look useful for water rescue work to carry and drop a light line or float to people or a boat that can be used to retrieve a heavier rescue rope. That might be where First Person Viewing would be helpful.
Great info! Thank you so much for doing this it should help me out immensely.
Hey there, great post! When are you going to publish the part which regards software?
greets!
please tell me which battery should i use to have flight of 15 min of a 1.5 kg quad copter without battery.
or simply give me some relation between battery and time and weight
Hey Oscar
I have been very interested in quadcopters and have been looking in to learning more of the Theory to them. I was hopping you could point me in the right direction, maybe give me some lines to websites and stuff like that to help.
what do you think of variable pitch quadcopter. like this one http://acl.mit.edu/projects/vpitch_quad.html
This is some rely great stuff that your doing.
Thank you for Reading
I am planning to write something about the maths involved, and related to the gyro accelerometer sensors, which is the key part.
The artcle was really helpful but flght controller and sensors should hav been explained in detail. could you please send me a site wherein i can find a detailed info on all this stuff
what exactly are you trying to find out? see if i can make a new post to explain it.
Good and concrete information. Thank you!
Great info, much appreciated. Request, please: What would you charge to design for me a quad or hex copter with a 50 pound lifting capacity? That is, motor and prop sizes and all components, the whole works with part numbers, and sources you would suggest or recommend? I’m pretty confident I can build it myself.
Thank you,
Jim D.
Great stuff Oscar. Just wondering if you will include the portion for making an own pid controller for stabilization of the copter. Will be wonderful to get it going here.
Hey, thanks! I will in the future posts write about every aspects of making a flying quadcopter. But at the moment I don’t have the budget for parts yet so I need to wait….
great job, I,m in the process of building one now.
Using carbon fiber parts left over from off the F35 jet fighter.
Good Luck! I am still learning the Theory stuff… Maths involved is really complicated!
Even want to learn more detailed theory, but couldn’t find any proper material, can you tell me what do you refer for theory?
Many thanks for such an informative and well written article. I’m new to Quadcopters but hope to build one over the summer holidays with a number of students. Can’t wait to get started
Looking forward to your next article
Thanks for the information, do you have any example codes?
Excellent article – can’t wait to get started