Known as the ZMR250, C250, Blackout Clone, QAV250, H250 or the Mystery 250, whatever the real name is, this Chinese made CF mini H quad frame has been mentioned everywhere. Every time when I shared photos of broken FPV250 frame photos, there would be people suggesting me to try this carbon fibre 250 frame. Since I have killed my last plastic mini quad frame, I will give this carbon fibre frame a shot!

I recently received a carbon fibre ZMR mini quad frame, and did a short review on it.
This quadcopter build is not going to be a clean one. I am literally just moving everything from my broken FPV250 quad to this new frame, so the wires are not going to be the correct length. Some of the pictures are borrowed from my previous FPV250 build for demonstration purposes.
Are you struggling on what parts to use in your min quad? See the complete part list for 250 size mini quad.
Update 06/04/2015 – Lost in the wood
Had a blast flying in the wood. This frame survived another day :D But unfortunately not the poor props!
Mini Quad Spec
Got the stuff from Ebay. Unless the component is linked to another website.

- ZMR250 H250 Carbon Fibre Frame (I bought my off eBay, but Banggood also sells them. You can also get spare arms for replacement.)
- Cobra 2204 1960KV Brushless Motors
- Hobbyking 12A Blue Series ESCs with SimonK Firmware
- Gemfan 5030 Propellers
- Naze32 with BaseFlight
- Frsky DJT Transmitter and Frsky D4R-II Receiver
- Turnigy 9X with er9X Firmware
- SONY SUPER HAD 600TVL CCD Camera PZ0420 with 2.8mm Lens
- Mobius Action Camera/ GoPro Hero3
- Super Simple OSD for voltage alarm
- ImmersionRC 5.8Ghz VTX
- Turnigy Nano Tech 4S Battery 1300mAh/1800mAh
- Weight ~ 610g
- Flight time ~ 7 minutes with 1300mah, 11 mins with 1800mah. (hover only)
ZMR250 Frame Assemble
First of all, install the 8 long standoffs (spacer) on the bottom plate.


The arms are motor mounts are for 2mm screws, but the Cobra 2204 motors I have use 3mm screws, so I had to drill through the holes to make it bigger. I used a pair of scissors to do this.

Always a good idea to use washers with bolts.

I have been hearing quite a few complaints on this thread about the arms snapped when crash. (Pictures from this thread)


I had an idea of using zip tie to hold the arms and bottom plates together through the holes (so it takes the impact and break to save the arms), but it doesn’t seem to hold the arm tight enough, and it was movable. Maybe I can use two zip tie per arm. You can also use nylon nuts/bolts to replace the metal ones, so the plastic always break first when crash.


Anyway I will leave it for later, and I will use the metal screws and nuts provided in the kit for now.
Installing Electronics
I like keeping the ImmersionRC Video transmitter under the flight controller to save space.

I use nylon spacers and botls on the flight controller (Naze32). If you want to use the KK2 on this ZMR250 frame, you might need to have some kind of adapter. It’s a perfect fit for the small size FC like the Naze32, Flip32 or the CC3D openPilot.

How it looks from the bottom.

ESC Preparation
This Hobbyking 12A BS ESC is the only few small ESCs that allow 4S input. With SimonK firmware flashed, it performs really well.


I flashed them with the Arduino board. I have a tutorial on how to do this.

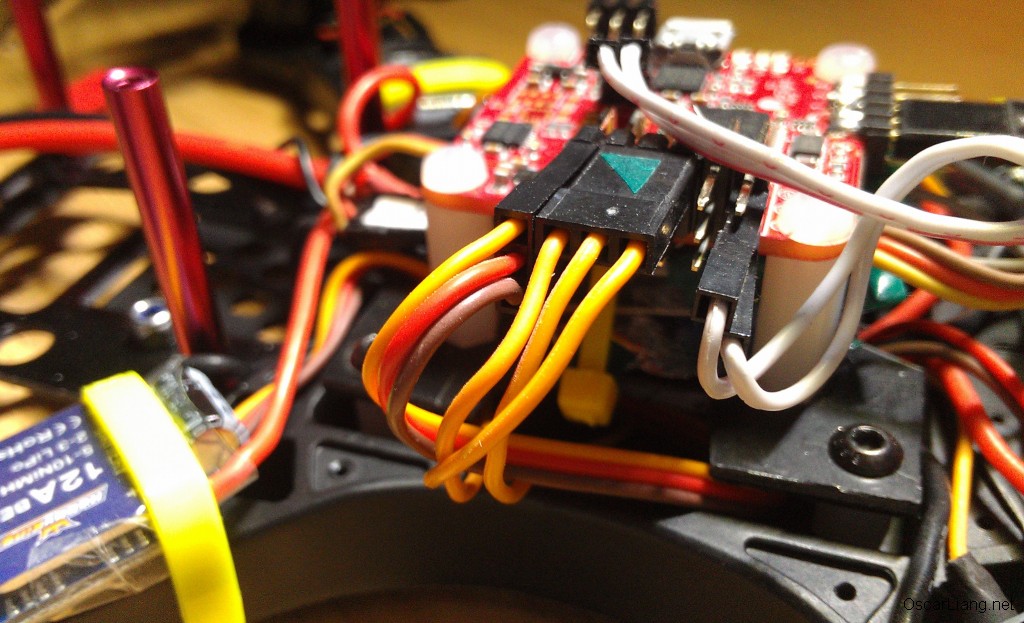
I also removed the 5V/GND cable of the BEC. I did this to 3/4 ESCs, only 1 BEC is left to power the Naze32 Flight controller and Radio receiver.


This picture is not taken from this build, but only to show how clean the wiring is after this mod.
Power Distribution
I don’t like using PDB (power distribution board), because they are just extra weight, and usually exposed. Any wet leaves get in could potentially cause short circuit.
I also added a branch for voltage OSD, and another branch for the video transmitter / Camera.
To find out what thickness wire you should be using, given the max current you might run in your system, check out this post. And learn about LiPo Parallel charging, to charge your batteries more efficiently and safely.




Motor
Continue to use the Cobra 2204 motors.

Installing the prop adapters, I use some loctite glue to make sure the screws doesn’t come loose due to motor or prop vibrations.

Cutting the wires of the motors and ESC’s to a reasonable length, and solder them together, finished with head-shrink tubes.



Although the ImmersionRC 600mW vTX accepts 4S Lipo voltage, the CCD camera only works on 12V, so I will be using the voltage regulator for both of them. To avoid any noise from the motors/ESC’s, I built a power filter for it. (The block at the tail of the quad, wrapped with transparent heat-shrink)
This frame is tiny, and i have run out of space on the bottom plate, so I am mounting the radio receiver on the top plate. I am using CPPM, so there is only one cable connection for 8 channels.

FPV Camera
I put extra washers on the top spacers, so the camera is tilted upward for better viewing angle when flying forward. I accidentally damaged the Sony FPV CCD camera, so I had to buy another one! I explained how I swapped the lens on this one here.
I wrote a detail guide on how to choose FPV camera.


Finish!
With Mobius.

With GoPro.


Calibrate the NAZE32, and PID settings
Please refer to this post on the Naze32 configurations. I have had good feedback from readers, saying it’s useful to them.
When it comes to PID, it’s a very subjective thing, and there is no model PID you can follow. Each DIY quadcopter will have unique PID settings. But if you are in doubt, check out my post about PID. The PID I have for this quad (as on 19/09/2014) is:
- Roll – 4.2 – 0.04 – 35
- Pitch – 4.6 – 0.04 – 38
- Yaw – 8.5 – 0.05 – 8
Radio Receiver Antenna
Found a good way of mounting the radio receiver antenna on this frame from one of RCModelReview’s youtube videos.
You need, one zip tie and a heat-shrink tube per antenna. The frsky radio receiver has two antennas (two wires), so I will be using two each.

Put cable tie through any holes you can find on the top plate, zip it like this.


Put zip tie and the antenna wire through the heat-shrink tube. Heat up the heat-shrink tube, so it holds the cable tie and antenna wire tight.

No more worries that antenna wires get sucked by propellers anymore! :D
Against the Wind! (Update 20/Sept/2014)
I am now using the GoPro Hero3 Camera instead of the Mobius Action Camera as the recording camera. The Gopro footage looks better than the Mobius, especially at extreme lighting condition, and the colour as well.
It was a bit windy and the PID was a bit too high, which resulted in some shakiness in the video, but that didn’t spoil the fun. Nothing fancy, just some fast runs, and flips.
Comparing to having the Mobius, the extra weight of the Gopro changes the center of gravity (COG), which seems to change the flight characteristics. It just felt different on the stick, which is a bit weird to me. It lost a bit of agility, but the turning especially extreme curve turn, it’s a lot smoother. It also flies faster without pitching forward as much. I really like it, both control wise and the video quality wise.
Hanging on the tree! (Update 27/Sept/2014)
It was a nice afternoon practice in the wood. I had quite a few crashes, but this frame is holding up pretty well. In the beginning of this video, it was a really funny crash, the quad got stuck on a swinging branch. “Quad hanging on a tree”, one item checked off my task list. :-D
Mini Quad Racing in the Wood (Update 08/Oct/2014)
Another enjoyable day of flight in the wood, falling in love with racing myself around trees and branches.
The last crash in the video killed my GoPro LCD screen. It’s now NOT showing anything, but the Camera is still working so shouldn’t be a huge problem.

I found it gets much easier when flying in tight space, where are also full of obstacles, is to always fly forward, do not stop and nor even hesitate. You will have a 5% chance of having a good, hard crash, but you will get away from the 95% annoying minor crashes. JUST KEEP GOING! :-p
Broken Arms! (Update 12/Oct/2014)
I finally managed to break this frame. Was trying some new moves, but it didn’t go as well as I hoped for. I rose to about 100 feet high, and flipped over, but somehow lost orientation and it free fell crashed into the ground.
It’s a pity the crash wasn’t saved on the SD card! damn!
Damaged report:
- 4 x props
- 2 x arms
- 1 x motor
- 1 x buzzer
- 1 x Lipo




Anyway here is the footage just before the crash, and the new moves I have been trying to learn.
https://www.youtube.com/watch?v=0HuPsEjB9pg
Revived! (Update 17/Oct/2014)
Spent an hour fixing the snapped motor wires, and replaced the two broken arms.



As good as new! So lucky I bought two spare arms with this frame!
Flying in gusty wind! (Update 27/Oct/2014)
It’s been windy and wet the last few weeks, as soon as it stops raining, I went to the park flying. It’s also a good chance to see how it performs under gusty weather condition. It was so windy (~17mph) it was difficult to control the quad, especially at high throttle yaw was a bit unstable, but it was totally flyable.
I think I can still increase TPA a bit, at the beginning I was flying at >80% throttle and quad was shaking a lot in the wind. In the middle I flew gently at around 60% and it was pretty smooth.
These cobra motors have survived 5 different frames in 6 months and they are getting a bit worn. Not as smooth as before and it’s making some kind of bad bearing noise.
Testing HQ5040 Props (Update 29/Nov/2014)
I waited weeks for a calm sunny day like this, looking at the weather this could well be the last flight of 2014. Tested the famous HQ5040 props on this mini quad, I am quite happy with the result. Still work to do tuning PID, there are some bumpiness in the video.
Very good props, expensive but very good quality propellers. It basically trades flight time for the extra thrust and stick control responsiveness. For racing and acro, I would no doubt choose this over the Gemfan 5030. But I will probably stick with Gemfan for general flying and practising in the wood. For a full review of the HQ5040.
Flip and Roll Practice on New Props (Update 07/Dec/2014)
This is my second flight with the HQ5040 props. With the new props I put on, rate became much faster and stick became more responsive, so I have to learn it all over again. I deliberately reduced roll/pitch rate to a comfortable level, so you will notice the difference in this video compared to the last video. I will try to up rate again gradually as I feel more confident.
The crash at the beginning of this video was a weird one (and lucky one!). I punched out and it was very powerful and great, but after a few rolls, I can’t seem to stabilize it. It felt like the motors or ESCs on the right side has stopped working, or not giving enough power. I tried my best to level it while trying to land it safely on bushes, and nothing was damaged.
Getting Ready for More FPV in 2015!
So that’s it, I don’t think I will do any more flying this year, so I spend a few hours watching through my FPV footage in 2014, and made a compilation video with some of my favourites FPV moments. Almost 50% of the footage has never been shown in my previous videos, and it was a nightmare editing them! :D
Firstly, The 2 minutes of shameful crashes :D
Not all crashes were pilot errors: 0:46 was an ESC issue, 0:59 was a Flight controller issue (rain – wet), 1:02 was a radio issue (lost signal), 1:50 was a FPV camera issue (blinded by sunlight). So far only broke 2 arms which costed me £5 to replace. Very happy with this frame :-D
Now the best FPV moments in 2014.
Unreal Scenery FPV ! (Update 13/Dec/2014)
Very lucky we have another calm sunny day here after a week of wind and rain. This is one of my most enjoyable flights and I had a great time! It was really cold (~5°), and my hands couldn’t feel anything and they were shaking, which might have resulted in some bumpiness in the video.
Still working on the PID for HQ5040, but I think I am getting there now.
64 comments
So awesome to see you still have ZMR in your fleet :) ..
same here ! .. i love it .. although lately the alien is getting a lot more flight time !
:)
Dear Oscar,
I built similar quad nearly one and half year ago and i spend quite some time tunning PIDs at the beginning of this summer. The quad is still not perfect as I am expecting from 250 size quad, I know hardware is two year old stuff and many things got changed around mini quads recently. My question is what will you do to improve this rig? What will have biggest impact?
I think about:
Upgrade to BetaFlight or CleanFlight (Maybe RaceFlight)?
3 blade props 5x4x3?
Higher KV motors and also bigger like 2206 2300KV?
One shot ESCs also more than poor 12A?
Different FC?
Better spec battery than turnigy nanotech?
Because the way I see is to build completely new quad lumenier 2206 motor, stronger kiss oneshot esc, kiss FC (or new kombini), 210 X type frame and performance lipo. Whats is your opinion? Is there way how to improve old rig or is it worth to build new one?
Thanks.
I don’t know what hardware you are using, but update to the Betaflight and your ESC firmware, you should feel the difference right away.
if you are still using SimonK 12A ESC, it’s time to move on! Get some latest BLHeli_S ESC :)
Hello Oscar,
I have ordered two ZMR250 frames from EBAY but they are not real carbon fiber, after i complained i got refund from both seller which is not easier to get on EBAY. could you please share the link from where you ordered your zmr250 frame out EBAY ?
thanks in advance
Only seller that sells reliable ZMR frame is FPVModel.com, check out my review on their frame.
Hi oscar I was wondering About how much did this setup cost? Thanks
around $200 to $300
Oscar and other thread readers: I was wondering if the center of gravity is purposely set above prop level by mounting the batteries on top in most of the 250 builds. Couldn’t it be better to load the bat inside the frame, trying to put the cog right into the center between the props? Or does the FC have to sit in the cog for accurate gyro / controls function?
What’s your thoughts?
yes it’s better to put battery inside frame, but i think it’s too small?
Hola Oscar . soy de la ciudad de Cucuta .Colombia. que pena ,molestarlo con mis preguntas .lo que pasa es que compre el ZMR250 .y tengo un tiempo volando y tratando de configurar la controladora CC3D. pero poco a poco la estoy configurando viendo territoriales de configuración de esa controladora .Pero no me a servido de nada . espese hacer acrobacias y cuando hago las vuelas para arriba y para abajo y rollos no me que dan bien tienen mucho movimiento y no corre nada en pocas palabras la tengo mal cuadrada me gustaría que por medio suyo me ayudara a configurarla con una configuración de los 3 modos de vuelo .agradezco la atención prestada .
english please…
Hi Oscar,
your Quadcopter is really nice and I just noticed that I’m going to build nearly the same.
I’m a absolute beginner and do have some stupid questions where I didn’t find any answer. Hope you can help me.
Why are there 2 cameras on board? Wouldn’t one camera be enough?
I have a 6-Ch Transmitter and Receiver of an old Walkera Helicopter. Is it possible to use these parts for my Quad now?
Thank you for helping me being less noob…;)
Hi Patrick
there are 2 cameras, because one is for streaming real time video back to your ground station… they perform better in dynamic range, and has very little latency. The other camera is for recording HD footage.
Yes 6ch TX/RX should work for multicopters just fine.
Hi Oscar,
You blog is very helpful, a lot of useful info at one place.
Now I`m going to build quad by my own and just curious, what awg wire you used for main harness?
Besr regards, Roma
that depends on your total current draw, check out this post: https://oscarliang.com/wire-awg-chart-quadcopter-rc/
for mini quad usually the total current is around 60A, so 16 or 14 awg should be good enough.
Hi Oscar!
I will be building this exact unit spec for spec sometime next month, when the parts have arrived and I’ve saved enough for the FPV kit :)
How important is the SimonK firmware to all of this? I don’t have an Arduino and I don’t really want to buy one just for this alone.
Thanks!
Hi Josh,
it’s not necessary, but it can make flying performance better.
You can fly without it.
thanks!
Hi Oscar! Great blog post, it helped me a lot on my first build.
I have a strange issue with my newly installed flip32+ (10dof) on my ZMR250 > i can hover for a few seconds and keep the quad reasonably stabilized (for 20-30 seconds at most during which the quad does not fly perfectly stable, I must say but wiggles a bit), but than the quad flips over to the left or backwards quit violently. Any idea where I should start to look? (newly installed: V8R7-II receiver with DJT module on Turnigy 9X (bound in D-mode for the receiver), flip32+ with 1.9.0 stable firmware installed). All seems to work fine in Cleanflight (motor test, spin direction works fine, calibrated accelerometer and magno,…). I am clueless. Thanks for your help.
Hi Oscar
Very nice blog, it’s really cool and helps a lot for beginners like me.
One question along the way: On some photos I see this “helping hands tool” for easier soldering.
Is it perhaps one of these two from Banggod?
banggood.com/Wholesale-Third-Hand-Soldering-Iron-Stand-Clamp-Clip-with-2_5X-Magnifier-p-41639.html
or
banggood.com/Wholesale-Brand-3_5X-12X-Third-Helping-Hand-Clip-Type-Magnifying-Magnifier-Glass-Quality-p-42199.html
Or can you make another recommendation?
Thank you,
M.
either one should work… but I would get one with a larger, metal base, so it’s not easy to move around when you are soldering. Try ebay :)
Hey Oscar, I am just starting my 250 build and I came across your blog which uses similar components to my buid. In your build you mentioned the harness has a branch for voltage OSD and another branch for the video transmitter / Camera.. You also mention you use a LC filter with a voltage regulator for both the camera and vTx.
I am trying to wrap my head around why two branches from the hardness? Could you not run one branch to the LC Filter, to the voltage regulator (to run 3S and 4S lipo) to the mini OSD which will power both the vTx and the camera? Or is there an advatage to power the OSD separately. If you have a wiring diagram handy that would really help out.
Thanks
The OSD i am using is the Super Simple OSD, it’s a standalone OSD, it reads battery voltage directly, and it’s not connected to the FC like the minimOSD. that’s why it needs a separate branch. :) hope that makes sense.
Hey Oscar,
very nice Blog. I am interested in a ZMR250 Setup-up but with a 3S Lipo. Do you have any recomendations for the right ESCs and good Motors? In a low to mid price range. Your list do offer to much different types and I am overwhelmed. thaank you so far.
there you go :)
https://oscarliang.com/cheap-250-mini-quad-recommendation/
Hello,
I built a ZMR250 as well with the following components:
4x 12A Emax ESCs
2x CCW + 2x CW Emax 2204 2300kV (I had the machine the holes to fit the motors.)
AR6110 Spektrum Receiver
Naze32 Rev5 from Readymaderc
5030 Gemfan props
600tvl Fatshark camera and 250mW 5.8GHz transmitter
with 3s 1300mAh Lumenier battery it barely flies. It has no punch whatsoever. My 180qx flies better. I am obviously doing something wrong but I am out of ideas.
I have calibrated the escs 10+ times, and at this point I am fairly inclined towards something else is going wrong.
The things I have not tried yet are:
-Flashing the firmware of the escs
-Although the motors have air intake on the sides, maybe they need more intake from the bottom.
Do you have an idea about what may be going wrong?
Thanks a lot in advance.
Sukru
1. what’s the weight of your quad?
2. what is the battery C rating?
3. tried calibrate your esc with instructions here: youtube.com/watch?v=AjLJZlG2TnU
1-The weight of the Quad is 510g with battery included.
2- The battery is 35C(burst 70C). I also checked for cold solder issue by measuring the resistance of connections between escs to motors and escs to battery. Everything seems fine.
3- I tried doing it through naze32. It was giving me some trouble. I did it one by one through the controller(dx6). ( the sounds were right). I checked what the set values correspond to in the base flight. The max value was 1890. So I set the max throttle to 1890 in Baseflight.
Thanks
1 – you need to calibrate them all at once. what is the problem when you do that?
2 – change Max Throttle to 2000 when you do ESC calibration
3 – Check your radio throttle end points (1000 – 2000 )
4 – one more question, how much throttle do you need to hover ? (0-100)
1- 510g with battery included
2- 35C(burst 70C)
3- Somehow some of the escs had a higher throttle range to begin with. So they did not respond to that procedure. I calibrated them with my Tx(dx6) individually. Then checked the max throttle value of tx in baseflight. It was 1890. So I set the max throttle to 1890 in baseflight as well.
Thanks
Sukru
He Oskar,
thanks a lot! Thank you as well for all the great work and research around this topic from yours!
THANK U!
funze
Would be kind if you could give the main dimensiones of that frame (mm), can`t find that nowhere in the net…
– diagonal
– motor center side to side
– motor center fwd bkwd
– space between motor center and main frame plate (for check of max prop size possible)
– frame widht between the spacers (are the screws of the spacer M3?) or2.5?
SY
funze
Hope this helps: https://oscarliang.com/carbon-fibre-mini-quad-frame-c250-review/
Thanks for information on your website. It has helped me plan my first mini quad build.
I bought theseHQ 5×4 props: rotorgeeks.com/index.php?route=product/product&path=59_63&product_id=91
as well as the Cobra 2204 2300kv motors: rotorgeeks.com/index.php?route=product/product&product_id=74&search=2300+kv
I was able to fit the prop on the screw of the motor but it seemed like it should go down further or fit more snug. I’ve seen other motors come with a prop adapter, Cone shape.
Can i send you pictures to see if i assembled correctly or i need to purchase an accessory/prop adapter or that the ring needs to be wider?
Hi Jeff, The cobra motor prop adapter shaft has slightly larger diameter, that why you find it a bit tight as you push the prop deeper.
I used one blade of the scissors to drill the prop hole just slightly bigger, so it fits more comfortably.
I added one of the included plastic rings in the hub of the prop and now it slides down the screw and fits more comfortably. Rotorgeeks also helped me out.
My only concern now is that the screws to mount motor to ZMR250 arm seem a little short (with the washer). Maybe two twists of screw driver. That happen for you as well? I will definitely put some lock tight glue on.
I can’t remember exactly if I used the stock motor mount screws, or it was the screws from my tool box. (since this build was more than 5 months ago now)
if they are too short, don’t risk it, get some longer ones on eBay, or your local shops. If you have spare screws from your ZMR250 frame, try them, I think they are also M3 screws.
it’s the 2014/05 one… I have never seen this problem, are the ESC calibrated properly first?
Hello guys, nice blog, when i fly my zmr250, i stop arouns 3.8v/cell so getting 5mins with 1350mah zippy, is it too soom am stopping the quad? or can i go bit lower ?
Thanks! Yes you can go lower. I usually stop at 3.5V/cell. If you use a voltage alarm, that when the alarm goes off (at 3.5V).
Hi Oscar
Thanks a lot for the information. Super help.
I am trying to decide between 3S or 4S batteries. I don’t have any batteries yet.
What is your opiniion about it in my case? I’ve heard people saying the 4S is a bit too heavy for the ZMR250? But I see you like them. I am confused.
Cheers
Marcelo
Depends on the type of pilot you are:
if you want to go faster, and maybe carry a gopro, 4S is better.
If you are just learning, and don’t care about speed, 3S is fine. (it can also carry a gopro, but might affect performance because of the weight)
4S batteries are more expensive, and takes longer to charge. Also there are more motors and ESC you can choose from for 3S Lipo than 4S.
It’s a tough decision, maybe you should calculate how much you would spend on each system, before deciding.
Hey Oscar,
finally started the build! One thing I’ve noticed now is when i plug the battery in, the ESC powering the flight controller gets very hot after a few minutes, even though I’m not running the motors. Is this a problem do you think? I’m scared to leave it plugged in for now.
Cheers!
Mat.
I’m using the turnigy nanotech 1800mah 4S as you recommended and the following ESC:
hobbyking.com/hobbyking/store/__62955__Afro_ESC_12Amp_Ultra_Lite_Multi_rotor_Motor_Speed_Controller_SimonK_Firmware_Version_3_UK_UK_Wa.html
I have not used these ESCs. I used the Hobbyking Blue series 12A. They do get a bit hot when all 5V, GND are connected to the flight controller, and I found it’s cooler to only connect one 5V, GND to the flight controller.
Also when it’s flying the air float should cool it down too.
mat was wondering if you ever figured out what was causing your esc to get hot i have same probem it’s only the # 1 esc on mine
Hi flyboy,
No I didn’t. The hot ESC and the Naze both went up in a puff of smoke today, so I guess something eventually took it’s toll.
I have spares of the ESC and naze so will try again but it is a bit of a worry that the ESC powering the FC is running so hot.
Cheers,
Mat.
that’s a bit odd… what else do you connect to the 5V rail apart from the FC and radio? putting the ESC on the arm under the props helps cooling :)
Salut ;
Why flasher Hobbyking 12A BS ESc ? We can fly without flash ?
the flashed ESC feels more responsive and stable. You can fly without flash.
Salut ;
Pourquoi flashé “Hobbyking 12A BS ESC” ? Peut on faire volé le drone sans le flashé ?
=D
FLY! (missing word fail!)
Hi Oscar
Thanks for this blog. I’m copying sonenof your setup for my first build. I’ve ordered the 1800mah battery but am now wondering if 65C is too high and will I encounter any I’ll effects if it is?
Any advice appreciated!
Mat.
Hi Mat!,
That’s great, share back with some pictures and videos, I would love to see it :D
It’s only 20gram heavier than the one I use (25-50C), so you should be fine!
I sometime use 2200mah as well! And it flies pretty well, less agile but much more stable, like a tank! :D
thanks
Oscar
Will do Oscar, I’m not terribly handy but I hope it’ll half as well as yours!
Cheers!
Hey Oscar. great build. i always come here to have a look before i do anything on my ZMR250.
I have run into a problem with my build. my Naze32 is set to cppm. i have a D4Rii plugged in, but it is receiving no power!? any ideas whats up. i have plugged it into an aircraft and it works fine there…. just not plugged into the naze32
any help would be great
So it works when it’s not set to CPPM?
did you connected Ch3 and ch4? make sure there is no shorts between + and – on the receiver?
do you have a multimeter? can you check the voltage between + and – on the Naze32 receiver pins?
Read so much of your material. Once again, so much help! Thanks!!! I just finished ordering what I hope were the last few connectors and what not for my Charger. Here is my list of delivered parts. Will be using my GoPro for FPV. You don’t have to check but if you do, does the list look complete. Knowing I have someone experienced checking things out would be re-assuring. ha ha. Probably get bashed posting on a forum.
Your same frame but the light grey version.
Rotorgeeks 12A BLHeli ESC V4 – Quadpack – 4S compatibility – USB adapter
Cobra 2204 1960k – 5mm integrated prop adapter w/nylon locknut
Acro Naze 32 Flight Controller – RED VER 5 – MultiWii-based configuration
Power Distribution Board XT60 20a Quad 3.5mm (debating on your wire splicing method)
40 Pairs 3.5mm Gold Bullet Connector Plug Male & Female for battery and ESC(debating on direct solder)
Spektrum AR8000 8 Ch DSM X Receiver
Gemfan 5030R Mini 2-Blade Prop CCW 4-Pack RED
Gemfan 5030 Mini 2-Blade Prop CW Red 4-Pack RED
RC Red and White Underbody 3528 LED Strip Lights Superbright FPV Quad(as long as they dont take to much juice)
Mini 3A DC-DC Adjustable Step down Power Supply Output 0.8V-20V Module
Turnigy nano-tech 1300mAh 4S 45~90C Lipo Pack/BP:JST-XH/DP: XT-60
Turnigy nano-tech 1800mah 4S 65~130C Lipo Pack/BP:JST-XH/DP: XT-60
50x 10mm M3 Black Nylon Threaded Hex Male-Female Standoff Spacer
100pcs 6mm/0.24″ Black Nylon M3 Threaded Hex Male-Female Standoff Spacer
Moisture protection – CRC Urethane Seal Liquid Coating, 11 oz Aerosol, Clear
FPV GEAR
Fatshark Dominator Gen3
TBS 5.8 Rx(wanting something different but not sure?)
ImmersionRC 5.8GHz 600mw A/V Transmitter
5.8GHz Circular Polarized Antenna RP-SMA TX/RX(going to try these out)
Fatshark 7.4v Lipo
Hero 3 Black
LPF-03 LC Power Filter (skimped on on the DIY you did, save a little time)
Super Simple OSD FPV for R/C Quad
GoPro Hero 3 USB to FPV Video Transmitter Lead – 200mm
Super Simple OSD
1.2g VTX/RX Antenna extension cable SMA/SMA jack(Incase i was to rip my antenna off it wont break off with the tx)
Your part list is looking good Buddy! :D
PDB – I would prefer to use wire harness, but PDB would be just fine. Remember to cover the exposed joints :D
Gold Connector – I would have used 2.5mm instead of 3.5mm, 3.5 is a little bit overkill and heavier. But it would do the job just fine.
Props – I hope you have bought enough props, and get ready to many crashes ahead of you :D also I would recommend the HQ5040 as well, they give you more power :D
Are you going to use the GoPro as the FPV camera for VTX as well? I would recommed getting a Sony Super Had camera they perform much better for FPV.
I’ll get the 2.5MM. Wasn’t looking for overkill, just missed that detail. Good catch. I’m into road cycling, so i’m all about saving weight.
HQ5040 props for more power, I’ll consider that option. Have about a dozen props so far, guess i’ll get some more coming. Once i get home this time, i’ll have 3 weeks off straight, so maybe more props is a good idea. ha ha
Argh, don’t use the goPro for FPV? Was really hoping to get away with just having one camera for video. Saw that a bunch of people used both, but I was just trying to simplify. Guess i’ll get one coming in case i’m not happy with the goPro feed. I was thinking adding a servo to my quad, and have it tilt using a separate channel when ever picking up speed. This way you wont just see the ground when flying fast, and when you come down for a landing til forward so can see what your doing. I know its overkill for a beginner, but just thinking.
Thanks for all your help, will have to show you the build here in a couple weeks!!!
Sounds like a plan Tunedis95! Yes please do show me your build when you are done! And videos please :D
I love cycling as well, and I like cycling to different places to fly my quad, it’s like having the best of both worlds :D
The servo idea is pretty good! I have mine camera tilted up 30 degree, so when I fly forward at 100% throttle I can still the front very well. It looks a bit weird when not flying forward, but I am used to it. Maybe try both ways, see which one you like better. :D
3 weeks off!? Oh man! you are so lucky, hope the weather be nice to you!
I love the build.I thaught about using these motors hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=39033 .I just wonder about the flight time.I think this will be my first miniquad and flight time is really important to me.What flight time did you achieve and what aproximate would I achieve with my motors?
thanks, i have not tried the motors you mentioned. These motors just came out not long ago, so maybe ask people on the product page? If you got budget just give it a try, they are pretty cheap anyway.
hey there, I am also doing a GoPro build with this small frame and i been looking for a while but cant find a good protective lens for GoPro. id love to know where you got yours =)
cheers from NZ
Thanks for posting this. I like how you mounted the Tx under the FC board. Doing this doesn’t cause any interference with the Tx being that close to the FC?
Thanks for showing your power harness. I usually build my own too, but never thought to do it like you did with a splice in the middle and 2 ESCS soldered to each end of the splice. Brilliant.
What is mounted under your top plate? Radio receiver?
Not at all, well I haven’t notice any interference.
Yes, it’s a Radio receiver on the top plate. This frame is tiny couldn’t fit everything on the bottom plate! :D